
摘 要: 針對陀螺長期漂移,系統(tǒng)無法長時間保持天線波束指向不變的問題,提出了電平掃描的補(bǔ)償方法。比較了幾種掃描方式,對圓錐掃描算法的理論推導(dǎo)、Matlab仿真和極化軸" title="極化軸">極化軸實(shí)現(xiàn)進(jìn)行了詳細(xì)闡述,并將圓錐掃描算法應(yīng)用于系統(tǒng)初始對準(zhǔn)和移動跟蹤,對實(shí)際采用的控制方式進(jìn)行了介紹,對算法效能和實(shí)驗(yàn)結(jié)果進(jìn)行了評估。
關(guān)鍵詞: 車載衛(wèi)星天線穩(wěn)定系統(tǒng)" title="穩(wěn)定系統(tǒng)">穩(wěn)定系統(tǒng) 圓錐掃描 陀螺 跟蹤
穩(wěn)定平臺是用來使被穩(wěn)定對象(如瞄準(zhǔn)具鏡頭、火炮炮身、雷達(dá)天線等)相對某方位保持穩(wěn)定的裝置。其特有的功能是隔離被穩(wěn)定對象安裝基座的角運(yùn)動,使其不受影響。主要特征是廣泛采用陀螺作為角運(yùn)動敏感元件,所采用的技術(shù)手段歸于慣性技術(shù)研究范疇。
車載衛(wèi)星天線穩(wěn)定系統(tǒng)要求車輛在移動中接收衛(wèi)星信號,其核心問題是解決如何在車輛運(yùn)動顛簸的情況下,保持天線波束指向不變的問題,即波束穩(wěn)定問題。本系統(tǒng)是一種典型的兩軸瞄準(zhǔn)線穩(wěn)定系統(tǒng),穩(wěn)定原理是在天線俯仰軸上安裝兩個敏感軸相互垂直的陀螺,區(qū)分敏感天線在方位和俯仰方向上相對于慣性空間的運(yùn)動,并將此信號作為速度反饋,以此實(shí)現(xiàn)回路穩(wěn)定[1]。
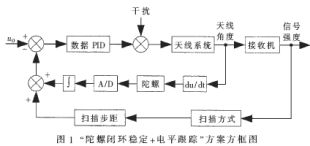
在跟蹤過程中,由于各種誤差,尤其是陀螺長期漂移的影響,隨著時間的推移,天線對衛(wèi)星的指向難免會偏離,造成衛(wèi)星信號的丟失,即僅靠陀螺自身閉環(huán)無法滿足衛(wèi)星接收對跟蹤精度的要求,必須建立一個良好的誤差補(bǔ)償機(jī)制。筆者選擇“陀螺閉環(huán)穩(wěn)定+電平跟蹤”方案,在陀螺穩(wěn)定的基礎(chǔ)上配以電平信號跟蹤環(huán),即在跟蹤的同時監(jiān)控電平信號,根據(jù)信號強(qiáng)度輔以掃描,對天線指向給予相應(yīng)的調(diào)整。方案控制方框圖如圖1所示。
1 各種掃描方式的比較
1.1 固定點(diǎn)的掃描方式
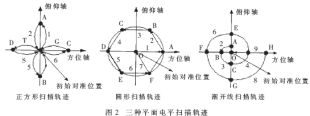
本系統(tǒng)實(shí)驗(yàn)過三種平面電平掃描軌跡:正方形掃描、圓形掃描和漸開線掃描,如圖2所示。由于等分粗糙,步距過大,這幾種掃描方式均不成功,常找錯方向,得不到理想的信號最大" title="最大">最大值位置。
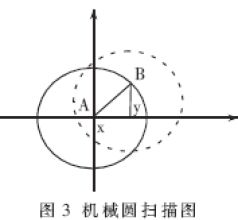
1.2 平面的機(jī)械圓跟蹤掃描[2]
天線的方位和俯仰角分別按照正弦及余弦關(guān)系運(yùn)動構(gòu)成連續(xù)的圓軌跡,如圖3所示。將圓軌跡256等分,以A為圓心掃描,采集各步信號大小。確認(rèn)信號在A→B方向最大后,求出" title="求出">求出方位、俯仰分量,使圓心移到B點(diǎn),繼續(xù)掃描。當(dāng)達(dá)到信號允許值后,中斷掃描轉(zhuǎn)入最大信號跟蹤過程。跟蹤誤差大小主要取決于圓錐掃描角、直流信號的斜率及傳動系統(tǒng)的精度。
1.3 三維空間圓錐掃描軌跡
已知極化軸的初始方位角" title="方位角">方位角和俯仰角,以此位置為中心線,極化軸頂點(diǎn)圍繞它以任意半徑走出圓形軌跡,在立體空間內(nèi)形成一個圓錐形狀,圓形軌跡為圓錐底面,如圖4所示。在一個圓上等分多步,掃描采集各步信號大小,一周后根據(jù)信號最大點(diǎn)強(qiáng)度決定下一步的掃描動作,擴(kuò)大掃描半徑或移動極化軸繼續(xù)掃描。這種掃描方式的典型特點(diǎn)是在三維空間形成圓錐軌跡,可以在慣性空間內(nèi)找到真正信號最大點(diǎn)。筆者最終選擇這種掃描方式。

2 圓錐掃描方式的誤差補(bǔ)償算法
2.1 規(guī)劃圓錐掃描軌跡
對于方位—俯仰型兩軸穩(wěn)定跟蹤平臺,控制的本質(zhì)是對方位電機(jī)和俯仰電機(jī)角度的控制。圓錐掃描算法的第一步是從空間解析幾何的角度,規(guī)劃極化軸在慣性空間內(nèi)走出圓錐軌跡,求出圓錐底面圓上任意位置的方位角和俯仰角。
2.1.1 初始條件
L為極化軸長度;初始方位角為0;θ0為初始點(diǎn)的俯仰角;β0為圓錐搜索角;Z為方位軸;Y為俯仰軸。
2.1.2 假設(shè)條件
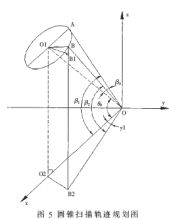
設(shè)b為搜索步距角,即每一步走的角度,i步后a=i×b,0≤a≤360°。搜索開始,極化軸上抬β0,即方位角不變,俯仰角增加β0,極化軸頂點(diǎn)從O1點(diǎn)到A點(diǎn)。然后做圓錐運(yùn)動,極化軸頂點(diǎn)軌跡是一圓周,如圖5所示。掃描半徑r=L×sin(β0),β1=θ0+β0,B為圓周過程中任一點(diǎn)。
2.1.3 求解結(jié)果
俯仰角:
2.2 Matlab驗(yàn)證圓錐掃描軌跡
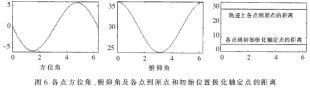
根據(jù)已知求出圓周上各點(diǎn)(即極化軸頂點(diǎn))的方位角和俯仰角,在立體空間做出圖形,如圖4所示。初始俯仰角30°,方位角0°,錐角5°,每周360個點(diǎn),各點(diǎn)方位角、俯仰角及各點(diǎn)到原點(diǎn)和初始位置極化軸定點(diǎn)的距離如圖6所示。顯然,圓錐軌跡規(guī)劃正確,根據(jù)算得方位、俯仰角可以在三維空間得到圓錐軌跡。
2.3 實(shí)際系統(tǒng)圓錐掃描軌跡驗(yàn)證
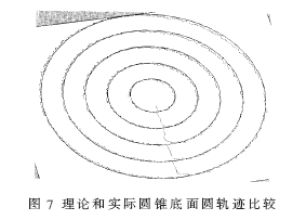
理論和仿真服務(wù)于實(shí)際,希望確保極化軸在慣性空間真實(shí)能走出圓錐軌跡。規(guī)劃圓錐軌跡,通過運(yùn)動控制器控制電機(jī)動作,位置模式保證每點(diǎn)位置,記錄每步方位、俯仰旋轉(zhuǎn)變壓器數(shù)值。如圖7所示為旋變后得到的軌跡與理想軌跡的比較(已在三維空間旋轉(zhuǎn))。從圖形可以清楚地看出實(shí)際方位、俯仰電機(jī)所走位置與理想圓錐軌跡相差無幾。
3 圓錐掃描在靜止間初始對準(zhǔn)中的應(yīng)用
在車載衛(wèi)星天線穩(wěn)定系統(tǒng)進(jìn)入移動跟蹤之前,首先要求在靜止間準(zhǔn)確對準(zhǔn)衛(wèi)星,接收到良好的電視信號。由于數(shù)字羅盤自身的精度,以及方位、俯仰旋轉(zhuǎn)變壓器和數(shù)字羅盤的安裝誤差帶來的影響,經(jīng)過數(shù)字羅盤測得的車體姿態(tài)換算成天線的指向角往往與實(shí)際指向角存在一定的偏差。為了準(zhǔn)確地對準(zhǔn)衛(wèi)星,使天線在初始對準(zhǔn)角周圍進(jìn)行圓錐掃描,同時記錄每個位置的電平電壓值,從中選定信號最好的位置,然后驅(qū)動天線指向此位置。
靜止間圓錐掃描的基本思路是:采用較大步距、較大范圍的粗掃描;發(fā)現(xiàn)電視信號以后,馬上停止鎖定該位置;進(jìn)行較小半徑、較小范圍的掃描,直到確定最佳信號位置。
4 移動跟蹤中“跟蹤+掃描”的控制方式
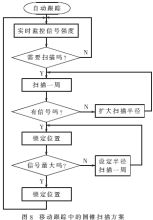
車載衛(wèi)星天線穩(wěn)定系統(tǒng)移動跟蹤間的圓錐掃描問題集中在三個方面:(1)穩(wěn)定性。速率陀螺HORIZON所能感應(yīng)到的速率自身有一定的限制,這要求固定頻率下掃描步距不能太大。(2)方向性。圓錐掃描要求保證得到正確的最大值方向,并且盡可能直接指向信號最強(qiáng)點(diǎn)的最優(yōu)化方向。(3)遞進(jìn)性[3]。當(dāng)信號丟失時,掃描一周仍然沒有信號,要求增大掃描半徑繼續(xù)掃描。掃描一周得到一個最大值方向,但不是信號最強(qiáng)點(diǎn),要求以新位置為圓心繼續(xù)掃描。
移動跟蹤中的圓錐掃描方案如圖8所示。
電平圓錐掃描改變了系統(tǒng)控制模式,有效地彌補(bǔ)了微機(jī)電陀螺長期精度的不足,形成以信號強(qiáng)度構(gòu)成反饋的大閉環(huán),在根本上消除系統(tǒng)原理誤差。實(shí)驗(yàn)證明,這種電平圓錐掃描算法切實(shí)有效,加入掃描的天線穩(wěn)定系統(tǒng)對星精度和時間大大增加。
目前,天線穩(wěn)定系統(tǒng)在二級公路上車速達(dá)到80km/h時能保證衛(wèi)星信號的長時間正常接收,在高速公路上車速達(dá)到120km/h能保證信號的正常接收。該技術(shù)已經(jīng)能滿足移動載體衛(wèi)星通信的要求,正在進(jìn)行工程化和小型化的有關(guān)工作。由于采用低成本的微機(jī)電陀螺作為慣性敏感元件,系統(tǒng)造價很低,整套系統(tǒng)已接近實(shí)用,具有廣泛的市場前景。
參考文獻(xiàn)
1 Kennedy P J, Kennedy R L, Direct versus indirect line of sight (LOS) stabilization[J]. IEEE Transactions on Control Systems Technology, 2003;11(1):3~15
2 湯 銘.動中通伺服系統(tǒng)的設(shè)計(jì).現(xiàn)代雷達(dá),2003;(4)
3 粟塔山.最優(yōu)化計(jì)算原理與算法程序設(shè)計(jì).長沙:國防科技大學(xué)出版社,2001
4 王齊祥. 船用跟蹤雷達(dá)的兩軸穩(wěn)定問題討論[J].現(xiàn)代雷達(dá),1996;(2):77~83