
0 引言
隨著電力電子技術(shù)的快速發(fā)展,開關(guān)電源越來越受到重視,尤其是在通信、電力領(lǐng)域中得到了廣泛應(yīng)用。
近年來,為了提高電源使用的方便性和簡易性,電源的模塊化和集成化成為研究的重要課題。電源采用模塊化設(shè)計使得不同的系統(tǒng)可以根據(jù)自身的容量來選擇并聯(lián)模塊的數(shù)量,同時又保證了冗余度,便于維護(hù)和替換,實現(xiàn)丁“積木式”結(jié)構(gòu),而針對這種新的系統(tǒng)結(jié)構(gòu),舊的電源監(jiān)控維護(hù)方式已無法滿足管理要求,因此,有必要采用“積木式”多重監(jiān)控系統(tǒng)。目前,一些文獻(xiàn)介紹了這種電源監(jiān)控方式,但是,監(jiān)控模塊沒有考慮到成本、體積等因素,而在將電源主功率和其他外圍電路集成時,這些因素是不得不考慮的。為了便于將監(jiān)控模塊與主功率模塊集成在一起,實現(xiàn)小型化,保證可靠性,必須設(shè)計出結(jié)構(gòu)簡單、功能強(qiáng)大、抗干擾能力強(qiáng)、成本低廉、便于大規(guī)模生產(chǎn)的監(jiān)控模塊。
1 監(jiān)控系統(tǒng)硬件設(shè)計
1.1 監(jiān)控系統(tǒng)硬件結(jié)構(gòu)
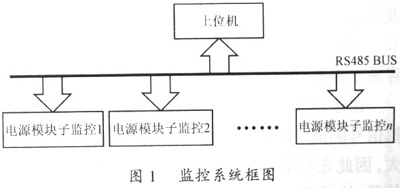
為了簡化監(jiān)控模塊的電路,采用總線式設(shè)計方案,即將大量的數(shù)據(jù)處理放在系統(tǒng)級監(jiān)控中,而模塊級監(jiān)控負(fù)責(zé)數(shù)據(jù)采集(包括輸出電壓、電流),以及提供各種保護(hù)功能并且進(jìn)行狀態(tài)監(jiān)控(包括過熱、過流、過壓、電網(wǎng)故障等)。由上位機(jī)通過通信總線對各個電源模塊進(jìn)行管理,監(jiān)控系統(tǒng)框圖如圖1所示。
1.2 監(jiān)控模塊硬件功能設(shè)計
單個監(jiān)控模塊所要實現(xiàn)的功能包括監(jiān)測功能、控制功能和通信功能.監(jiān)測是指動態(tài)采集模塊輸出電流、判斷模塊工作狀態(tài),并將數(shù)據(jù)和有關(guān)狀態(tài)傳輸給系統(tǒng)上位機(jī);控制是指接受上位機(jī)發(fā)出的調(diào)壓信號進(jìn)行模塊輸出電壓的調(diào)節(jié),也可以通過面板上電位器進(jìn)行輸出電壓調(diào)節(jié),同時實現(xiàn)故障保護(hù);通信是指模塊配備RS485接口與系統(tǒng)上位機(jī)通信。
監(jiān)控模塊的功能框圖如圖2所示。電源主功率電路采用移相全橋,可以實現(xiàn)軟開關(guān),提高效率,為了擴(kuò)展軟開關(guān)的負(fù)載范圍,增加了輔助網(wǎng)絡(luò),具體的電路和工作方式本文不做討論。虛線框內(nèi)所示就是整個監(jiān)控模塊,模塊的輸入量有電網(wǎng)輸入電壓、散熱片溫度、電源輸出電壓和輸出電流;模塊的輸出量有調(diào)壓信號、電源關(guān)閉信號和送給上位機(jī)的電源運(yùn)行狀態(tài)信號。
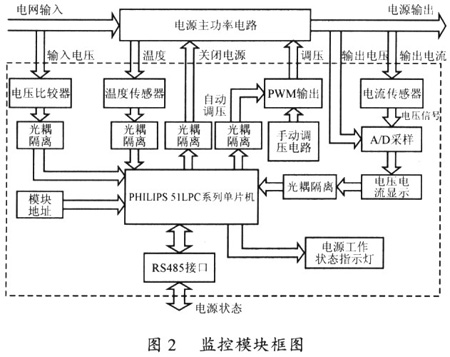
微處理器是監(jiān)控的核心器件,奉系統(tǒng)采用PHILIPS公司的P87LPC768單片機(jī),其內(nèi)部集成了PWM口、UART、WATCHDOG,該微處理器體積小(20腳)、功耗低、功能強(qiáng)大。PWM口可以用來進(jìn)行D/A轉(zhuǎn)換,由于對輸出電壓的調(diào)節(jié)不是很快的調(diào)速系統(tǒng),因此只需要普通光耦隔離,跟隨阻容濾波器進(jìn)行濾波,得到控制信號,對輸出電壓進(jìn)行調(diào)節(jié),這樣,充分利用了單片機(jī)內(nèi)部的資源,減少了容易受溫度和電磁場干擾的外圍元器件。
由于電源模塊內(nèi)部溫度變化較大,普通的模擬信號隔離(如采用線性光耦隔離)受溫度影響較大,因此先對輸出電壓和電流進(jìn)行采樣,得到數(shù)字信號,然后再通過光耦隔離送入單片機(jī)內(nèi)處理。電流采樣選用的是串行A/D轉(zhuǎn)換器(如MAX1109),這樣一方面節(jié)省了單片機(jī)有限的管腳資源,另一方面減小了模塊體積。由于串行A/D轉(zhuǎn)換器的數(shù)據(jù)讀出和寫入的頻率可以比較低,因此可以采用普通光耦,降低成本。而轉(zhuǎn)換時鐘則可以采用A/D轉(zhuǎn)換器內(nèi)部的高頻時鐘,不會影響轉(zhuǎn)換精度。
采樣得到的輸出電壓和電流值,也可以通過串行通信傳送到上位機(jī),供上位機(jī)對整個系統(tǒng)進(jìn)行監(jiān)控管理,同時也供模塊本身的液晶顯示用。為了節(jié)約單片機(jī)的資源,可以采用串行傳送的方案。通過一個串行/并行轉(zhuǎn)換器(如74LS164)來實現(xiàn)這一功能。液晶可以采用模塊,簡化設(shè)計電路,提高可靠性。同時為了節(jié)省單片機(jī)資源,可以讓液晶模塊工作在4位數(shù)據(jù)方式。
監(jiān)控模塊的電壓調(diào)節(jié)方式有兩種:一是通過手動調(diào)節(jié)旋鈕進(jìn)行手動調(diào)節(jié),二是修改軟件里的設(shè)置進(jìn)行調(diào)節(jié)(系統(tǒng)級監(jiān)控中才涉及)。控制電源模塊的輸出電壓主要是要控制PWM波形的占空比,第一種方式下必須設(shè)計出可以產(chǎn)生占空比可調(diào)的PWM波形的電路(如由555定時器組成的占空比可調(diào)的多諧振蕩電路),第二種方式下,是利用PHILIPS的P87LPC768單片機(jī)的PWM口產(chǎn)生PWM波形,而占空比的改變是在軟件中進(jìn)行設(shè)置的。
監(jiān)控模塊與上位機(jī)進(jìn)行通信時,由于是多級通信,必須要有地址來進(jìn)行相互區(qū)分,對每個模塊進(jìn)行地址編碼,模塊的地址設(shè)定靠撥碼開關(guān)來控制,設(shè)置好的地址通過并進(jìn)串出移位串行寄存器讀入單片機(jī)內(nèi)進(jìn)行處理。通信采用485協(xié)議。
采用上述設(shè)計方案設(shè)計出來監(jiān)控模塊體積小,成本較低,功能又比較完善。
2 監(jiān)控系統(tǒng)軟件設(shè)計
整個系統(tǒng)的軟件采用模塊化設(shè)計,由多個子程序構(gòu)成,便于調(diào)試和擴(kuò)展。為了提高采樣數(shù)據(jù)的準(zhǔn)確性,減小誤差,在程序中采用了數(shù)字濾波技術(shù)。
主程序的流程圖如圖3所示,初始化后進(jìn)入主循環(huán),檢測系統(tǒng)的狀態(tài),判斷是否過壓,電網(wǎng)是否故障,是否過溫,是否過流,并且采樣輸出電流,轉(zhuǎn)換成電壓信號作為顯示并且通過通信總線輸送到上位機(jī)。由于模塊的電壓、電流顯示只是起到監(jiān)視作用,不作為測量,因此刷新的頻率不需要很高,基本上不加重MCU的負(fù)擔(dān)。

檢測系統(tǒng)狀態(tài)時,如果發(fā)生了故障,延時再判斷是不是真的出現(xiàn)故障,一旦確認(rèn)是出現(xiàn)了故障,關(guān)掉模塊輸出,同時用不同的LED指示燈來顯示不同的故障。這其中,過溫故障和電網(wǎng)故障是屬于可恢復(fù)性故障,因此要求等待一定時間,當(dāng)故障消失后,模塊能夠重新啟動;而輸出過壓和過流故障是不可恢復(fù)性故障,則不應(yīng)該再讓模塊重新啟動。
上位機(jī)對下位機(jī)的控制主要通過通信總線,采用主從式多機(jī)通信方式,上位機(jī)首先處于方式二,發(fā)出地址幀,然后等待從機(jī)的回答信號,收到后轉(zhuǎn)為方式三,再發(fā)出指令。被呼叫的從機(jī)收到主機(jī)的地址幀后,如果與自己的地址一致,就從方式二切換為方式三,把自己的地址作為數(shù)據(jù)發(fā)出,然后等待指令。
數(shù)據(jù)格式如下:

D8位為1表示發(fā)出的是地址幀,08位為0表示發(fā)出的是數(shù)據(jù)幀。模塊地址編號從0到15,與模塊放置次序一一對應(yīng)。通
信波特率為2400bps。
3 結(jié)語
本文介紹的監(jiān)控系統(tǒng),功能齊全,可靠性高,體積很小,而且抗干擾能力強(qiáng),受溫度影響小,成本低廉,能夠應(yīng)用在高功率密度電源模塊中,有很大的實用價值,現(xiàn)已應(yīng)用在通信電源產(chǎn)品中。