
1 引言
在蓄電池" title="蓄電池">蓄電池生產(chǎn)過(guò)程中,,為了保證產(chǎn)品質(zhì)量,常需對(duì)成品蓄電池進(jìn)行幾次充放電處理,。傳統(tǒng)充放電設(shè)備通常采用晶閘管作為整流逆變功率器件,。裝置比較復(fù)雜,交流輸入,、輸出的功率因數(shù)較低,。對(duì)電網(wǎng)的諧波污染也比較大。為此,,設(shè)計(jì)了一種三相SPWM整流逆變蓄電池充放電裝置" title="充放電裝置">充放電裝置,。它采用IGBT作為功率變換器件。交流側(cè)以精密鎖相的正弦波電流實(shí)現(xiàn)電能變換,??色@接近于1的功率因數(shù),實(shí)現(xiàn)對(duì)蓄電池的充放電處理,,顯著降低了對(duì)電網(wǎng)的諧波污染,,滿足了綠色環(huán)保和節(jié)能的設(shè)計(jì)要求。
2 系統(tǒng)結(jié)構(gòu)及工作原理
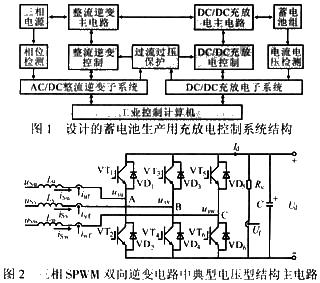
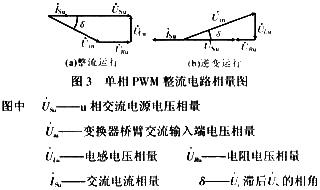
圖1示出設(shè)計(jì)的蓄電池生產(chǎn)用充放電控制系統(tǒng)結(jié)構(gòu)[1],。該系統(tǒng)從原理上可劃分為SPWM雙向逆變和DC/DC變換充放電兩個(gè)子系統(tǒng),。前者,在蓄電池充電時(shí),,通過(guò)三相PFC升壓控制實(shí)現(xiàn)AC/DC變換,。將交流電網(wǎng)電壓轉(zhuǎn)換成蓄電池充電所需的直流電壓;在蓄電池放電時(shí),,通過(guò)三相PFC恒壓逆變控制實(shí)現(xiàn)DC/AC變換,,將蓄電池釋放的能量回饋電網(wǎng),。后者,完成逆變直流電能與蓄電池電能的轉(zhuǎn)換,,以保證蓄電池充放電過(guò)程中所要求的電流,、電壓和時(shí)間的控制。各子系統(tǒng)采用單獨(dú)的DSP" title="DSP">DSP管理,,DSP部分以模板化直插結(jié)構(gòu)直接插入工控機(jī)的主板,,工控機(jī)承擔(dān)整個(gè)系統(tǒng)的監(jiān)控管理。系統(tǒng)由1個(gè)逆變子系統(tǒng)和n個(gè)(實(shí)驗(yàn)樣機(jī)設(shè)計(jì)為15個(gè))充放電子系統(tǒng)組成,。系統(tǒng)工作時(shí),,可通過(guò)工控機(jī)編組,使后路蓄電池工作于充電狀態(tài),;n-k路工作于放電狀態(tài),,這樣蓄電池能量就可直接在系統(tǒng)內(nèi)部進(jìn)行交換,從而顯著提高了節(jié)能效果,。圖2示出三相SPWM雙向逆變電路采用的典型電壓型結(jié)構(gòu)主電路[2],。
三相反饋電流iuf,ivf,,iwf用于跟蹤由DSP產(chǎn)生的電流給定信號(hào),,從而控制直流端電壓Ud的穩(wěn)定;Ud的反饋電壓Ut的值經(jīng)DSP采樣后通過(guò)電壓調(diào)節(jié)得到作用于電流內(nèi)環(huán)的電流給定值,。
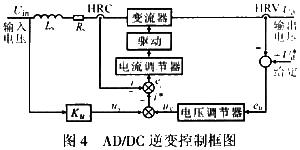
圖3示出單相PWM整流電路的相量圖[2],。雖然該系統(tǒng)采用的是三相PWM整流電路.但其工作原理與單相電路相似,只是從單相擴(kuò)展到三相,。對(duì)電路進(jìn)行SPWM控制,,在橋的交流輸入端A,B,,C可得到三相橋臂的SPWM電壓uiu,,uiv,uiw,。對(duì)其各相按圖3的相量圖進(jìn)行控制,,就可使各相電流iu,iv,,iw為正弦波,。且與電壓同相位,功率因數(shù)近似為1,。

由此可知,,控制uiu的大小和相位δ即可控制電流的大小和流向,從而控制功率的大小和方向,。通過(guò)對(duì)Ud的恒壓控制,,實(shí)現(xiàn)逆變器的功率流向,,從而實(shí)現(xiàn)能量的自動(dòng)雙向流動(dòng),。
3 電壓控制器的設(shè)計(jì)
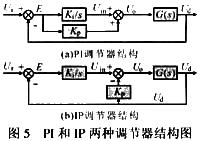
圖4示出AD/DC逆變控制框圖,。該系統(tǒng)采用電壓、電流雙閉環(huán)控制結(jié)構(gòu),,其電壓控制對(duì)象為直流量,;電流控制對(duì)象為交流量。電壓外環(huán)采用數(shù)字算法予以實(shí)現(xiàn),;電流內(nèi)環(huán)采用模擬電路予以實(shí)現(xiàn),,以確保快速進(jìn)行電流控制,,提高系統(tǒng)工作的可靠性,。同時(shí),為了使誤差電流與給定相位保持一致,。電流調(diào)節(jié)器采用比例控制,。
蓄電池充電時(shí),輸出電壓Ud低于給定值Ud*,,則電壓調(diào)節(jié)器輸出正的uc,,輸入電壓Uin經(jīng)過(guò)一個(gè)比例因子Ku后得到一個(gè)與Uin同相的單位正弦us,uc與us的乘積作為給定電流i*,,與Uin同相,,控制i跟隨i*,則能量就以單位功率因數(shù)從電網(wǎng)流向蓄
電池,。此時(shí),,變流器工作在整流狀態(tài)。蓄電池放電時(shí),,Ud高于Ud*,,則uc為負(fù)值,uc與us相乘得到與Uin反向的給定電流i*,,控制i跟隨i*,,能量就能以單位功率因數(shù)從蓄電池流向電網(wǎng)。此時(shí),,變流器工作在逆變狀態(tài),。電壓外環(huán)產(chǎn)生輸入給定電流i*,其幅值表明了功率的大??;符號(hào)決定了功率的流向;相位決定了能量傳遞的功率因數(shù),。電流內(nèi)環(huán)使輸入電流跟蹤給定,,從而實(shí)現(xiàn)可逆的單位功率因數(shù)變換,。
系統(tǒng)采用TMS320LF2407A DSP作為主處理器,因其有豐富的外設(shè)和較高的運(yùn)算速度,。由此可實(shí)現(xiàn)較復(fù)雜的控制及高精度的數(shù)據(jù)處理,。在此,通過(guò)對(duì)PI控制,、IP控制和變速積分PI控制三種電壓調(diào)節(jié)器算法的實(shí)驗(yàn)得出其優(yōu)劣,,從而選擇最適合該系統(tǒng)的控制算法進(jìn)行電壓調(diào)節(jié)。
(1)PI控制算法和IP控制算法
圖5a示出PI調(diào)節(jié)器結(jié)構(gòu)圖,。由圖可得其傳遞

比較式(5)和式(6)可見(jiàn),,兩種系統(tǒng)的傳遞函數(shù)分母相同,故IP調(diào)節(jié)器可持有與PI相同的無(wú)靜差調(diào)節(jié)和穩(wěn)定特性,,同時(shí)因它在傳遞函數(shù)上比PI少一個(gè)零點(diǎn),,因此具有比PI更好的高頻衰減特性,容易滿足較長(zhǎng)采樣周期數(shù)字調(diào)節(jié)的穩(wěn)定性要求,,能有效抑制混迭現(xiàn)象,。系統(tǒng)實(shí)驗(yàn)證明,采用IP調(diào)節(jié),,調(diào)節(jié)器參數(shù)很容易整定,。可使系統(tǒng)達(dá)到穩(wěn)定,、無(wú)靜差和很小的超調(diào),。不過(guò)在快速性方面將有損失。
(2)變速積分PI控制算法[3]
在傳統(tǒng)的PI算法中,,因積分增益Ki為常數(shù),,在整個(gè)調(diào)節(jié)過(guò)程中,其值不變,。但系統(tǒng)對(duì)積分的要求是偏差大時(shí),,積分作用減弱,否則會(huì)產(chǎn)生超調(diào),,甚至出現(xiàn)積分飽和,;反之則加強(qiáng),否則不能滿足準(zhǔn)確性的要求,。引進(jìn)變速積分PI控制算法能使控制性能得以滿足,。其基本思路是偏差大時(shí),積分累積速度慢,,積分作用弱,;偏差小時(shí),積分累積速度快,,積分作用強(qiáng),。為此,,設(shè)置系數(shù)f[E(k)],它是偏差E(k)的函數(shù),,當(dāng)E(k)增大時(shí),,f[E(k)]減小,;反之則增大,。每次采樣后,用f[E(k)]乘E(k),,再進(jìn)行累加。f[E(k)]與E(k)的關(guān)系可表示為:
在該系統(tǒng)中,,采用簡(jiǎn)單的變速積分PI控制,,取A=32,B=8,,當(dāng)誤差大于40時(shí),,系統(tǒng)相當(dāng)于采用純比例調(diào)節(jié),因此響應(yīng)速度加快,;當(dāng)誤差小于40并減小到8的過(guò)程中,,積分作用開(kāi)始并逐漸增強(qiáng),響應(yīng)過(guò)程快速平滑,;當(dāng)誤差小于8時(shí),,完全引入積分作用,能快速有效地消除靜差,。該方法可有效抑制系統(tǒng)的超調(diào),,同時(shí)也可兼顧系統(tǒng)的響應(yīng)速度。
4 實(shí)驗(yàn)結(jié)果
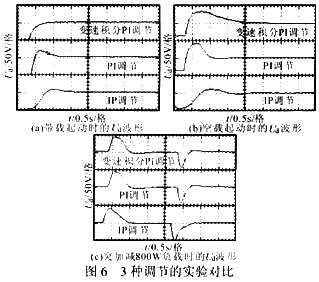
利用PI,,IP和變速積分PI數(shù)字電壓調(diào)節(jié)器的逆變子系統(tǒng)對(duì)該設(shè)計(jì)方案進(jìn)行了大量實(shí)驗(yàn),。結(jié)果可見(jiàn),采用變速積分PI數(shù)字電壓調(diào)節(jié)器的綜合性能優(yōu)于前兩種算法,。圖6示出采用PI調(diào)節(jié),、IP調(diào)節(jié),以及變速積分PI調(diào)節(jié)時(shí)用100M-Tektronix TDS220存儲(chǔ)示波器獲取的一組直流母線電壓Ud的實(shí)驗(yàn)對(duì)比波形,。逆變器起動(dòng)時(shí)Ud由150V升至200V,。由圖6可見(jiàn)。3種調(diào)節(jié)器在無(wú)靜差調(diào)節(jié)方面的性能相同,,而IP的上升時(shí)間明顯大于另外兩種算法,;在抑制超調(diào)及高頻噪聲誘發(fā)振蕩方面,變速積分PI法有著明顯的優(yōu)勢(shì),,PI系統(tǒng)的起動(dòng)超調(diào)超過(guò)20V,,IP系統(tǒng)的超調(diào)不到10V,,而變速積分PI系統(tǒng)則無(wú)超調(diào)。無(wú)振蕩,,能很快進(jìn)入穩(wěn)定狀態(tài):在抗干擾性能方面,,變速積分PI系統(tǒng)也具有同樣的特點(diǎn)。
5 結(jié)論
介紹的逆變器采用了直流母線電壓的恒壓數(shù)字調(diào)節(jié),,可方便地實(shí)現(xiàn)電網(wǎng)能量和蓄電池能量的雙向流動(dòng),,精密鎖相的SPWM控制可獲得接近于1的功率因數(shù),理論分析和系統(tǒng)實(shí)驗(yàn)表明,,在DSP控制采樣周期等于交流電源周期的交流控制系統(tǒng)中,,采用變速積分PI調(diào)節(jié)更易獲得小超調(diào)、無(wú)振蕩,、無(wú)靜差的控制性能指標(biāo),。該設(shè)計(jì)系統(tǒng)可攜帶15路3A蓄電池組(每組12V蓄電池15節(jié)串聯(lián))進(jìn)行充放電子系統(tǒng)工作,每路工作由工控機(jī)編程獨(dú)立控制,。通過(guò)對(duì)充電組和放電組的合理配置,,可獲得顯著的節(jié)能效果。