
1 引言
CAN(Controller Area Network)即控制器區(qū)域網(wǎng),CAN總線是由德國BOSCH公司為實(shí)現(xiàn)汽車測量和執(zhí)行部件之間的數(shù)據(jù)通訊而設(shè)計(jì)的、支持分布式控制及實(shí)時(shí)控制的串行通訊網(wǎng)絡(luò)。CAN BUS現(xiàn)場總線已由ISO/TC22 技術(shù)委員會(huì)批準(zhǔn)為國際標(biāo)準(zhǔn)IOS11898(通訊速率小于1Mbps)和ISO11519(通訊速率小于125kbps)。CAN總線開始主要應(yīng)用于自動(dòng)化電子領(lǐng)域的汽車發(fā)動(dòng)機(jī)部件、傳感器、抗滑系統(tǒng)等應(yīng)用中,但隨著CAN的應(yīng)用普及,CAN總線的實(shí)時(shí)性以及抗干擾能力強(qiáng)等優(yōu)點(diǎn)也逐步為航天領(lǐng)域所認(rèn)可。
本文將對(duì)CAN總線在航天領(lǐng)域應(yīng)用情況進(jìn)行介紹,并在CAN總線和DSP技術(shù)研究的基礎(chǔ)上,設(shè)計(jì)了基于CAN總線和DSP的雙層數(shù)據(jù)采集系統(tǒng)。文中將重點(diǎn)介紹雙層數(shù)據(jù)采集系統(tǒng)的結(jié)構(gòu)組成以及CAN總線接口的設(shè)計(jì)。
2 CAN總線在航天領(lǐng)域的應(yīng)用狀況
CAN總線開始主要應(yīng)用于自動(dòng)化電子領(lǐng)域的汽車發(fā)動(dòng)機(jī)部件、傳感器、抗滑系統(tǒng)等應(yīng)用中,但隨著CAN的應(yīng)用普及,其應(yīng)用范圍已不局限于汽車行業(yè),正在逐步為航天領(lǐng)域所認(rèn)可。1995年SSTL(Surrey大學(xué)衛(wèi)星技術(shù)公司)將CAN作為星載遙測/遙控信道,隨之SSTL開發(fā)了基于CAN的分布式解決方案。至今SSTL已經(jīng)在UoSAT-12,SNAP-1,AISAT-1,UKDMC,NigeriaSAT-1,BilSAT-1 等6顆LEO衛(wèi)星中應(yīng)用了CAN總線網(wǎng)絡(luò),用于實(shí)現(xiàn)星載計(jì)算機(jī)與其他任務(wù)節(jié)點(diǎn)之間的通信;ESA在SMART-1上也將CAN作為系統(tǒng)總線和有效載荷總線,實(shí)現(xiàn)數(shù)據(jù)交換和控制命令的傳送。
ESA開展的CAN技術(shù)研究表明以差分信號(hào)傳輸?shù)母咚俅锌偩€用于星載設(shè)備之間的數(shù)據(jù)傳輸能保證通信的及時(shí)性,有利于降低星載設(shè)備的功耗,有助于獲得低噪聲、抗電磁干擾性強(qiáng)、EMI低、信號(hào)不受電源開關(guān)狀態(tài)變化影響等優(yōu)勢,具有良好的航天應(yīng)用前景。隨著航天電子技術(shù)的發(fā)展,航天電子設(shè)備綜合化程度越來越高,設(shè)備之間需要交互的信息量越來越大,CAN總線技術(shù)已經(jīng)開始在航天電子領(lǐng)域得到越來越廣泛的運(yùn)用。
在國內(nèi),CAN總線技術(shù)已在小衛(wèi)星中得到了實(shí)際的應(yīng)用。隨著航天信息一體化技術(shù)的發(fā)展,CAN總線將廣泛應(yīng)用于航天器的測量、控制等系統(tǒng)。CAN接口的采用將大大簡化了測量系統(tǒng)的電纜網(wǎng),提高航天器的飛行可靠性。
3 雙層數(shù)據(jù)采集系統(tǒng)的結(jié)構(gòu)及功能
雙層數(shù)據(jù)采集系統(tǒng)的整體結(jié)構(gòu)如圖1所示。
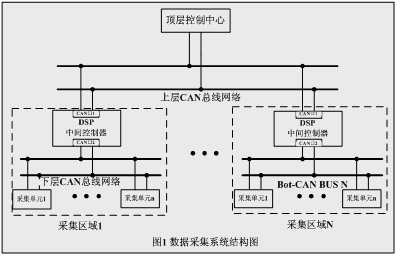 |
雙層數(shù)據(jù)采集系統(tǒng)由采集單元、DSP中間控制器、頂層控制中心等組成,它的組成結(jié)構(gòu)如圖1所示。本數(shù)據(jù)采集系統(tǒng)可同時(shí)實(shí)現(xiàn)對(duì)多區(qū)域、多單元的數(shù)據(jù)采集和信息管理控制,采用分級(jí)、區(qū)域控制的優(yōu)化控制思想,采用DSP中間控制器作為各采集區(qū)域的核心控制器,實(shí)現(xiàn)上下層間的數(shù)據(jù)交換。
采集單元是數(shù)據(jù)采集系統(tǒng)構(gòu)成的基礎(chǔ)與關(guān)鍵,它直接與參數(shù)采集執(zhí)行機(jī)構(gòu)相連接,實(shí)現(xiàn)對(duì)現(xiàn)場參數(shù)的采集,包括電壓、電流、溫度、轉(zhuǎn)速等。采集單元自身具有微控制器和存儲(chǔ)器,既作為系統(tǒng)的重要組成部分,參與系統(tǒng)功能的實(shí)現(xiàn),也可以它作為獨(dú)立單元來完成數(shù)據(jù)采集功能,即在系統(tǒng)出現(xiàn)通信等故障的情況下,采集單元仍可以獨(dú)立實(shí)現(xiàn)數(shù)據(jù)采集功能,并進(jìn)行數(shù)據(jù)存儲(chǔ),提高了系統(tǒng)的可靠性。采集單元通過標(biāo)準(zhǔn)的CAN總線接口,連接到Bot-CAN總線上,實(shí)現(xiàn)對(duì)現(xiàn)場數(shù)據(jù)的采集和傳輸。
DSP中間控制器是整個(gè)采集系統(tǒng)的通信樞紐,提供上層網(wǎng)絡(luò)和下層網(wǎng)絡(luò)通訊的雙接口。一方面通過上層網(wǎng)絡(luò)(Top-CAN BUS)與頂層控制中心進(jìn)行通訊,另一方面通過低層網(wǎng)絡(luò)(Bot-CAN BUS)與各個(gè)采集單元進(jìn)行通訊。DSP中間控制器是數(shù)據(jù)采集的區(qū)域控制器,實(shí)現(xiàn)對(duì)本區(qū)域數(shù)據(jù)的收集、處理,并通過CAN總線與頂層控制中心進(jìn)行數(shù)據(jù)通訊,實(shí)現(xiàn)頂層控制中心對(duì)各個(gè)數(shù)據(jù)采集區(qū)域和采集單元的信息收集和控制。
4 CAN總線網(wǎng)絡(luò)接口的設(shè)計(jì)
雙層CAN總線網(wǎng)絡(luò)的主要接口包括采集單元的CAN總線接口、DSP中間控制器的雙CAN總線接口和頂層控制中心的CAN總線接口。其中采集單元的CAN總線接口采用標(biāo)準(zhǔn)的CAN總線接口,這里不再贅述。而頂層控制中心一般為工業(yè)控制計(jì)算機(jī),可通過CAN通信卡直接連接到CAN總線網(wǎng)絡(luò)上,因此也無需多做說明,下面重點(diǎn)介紹具有雙CAN總線接口的DSP中間控制器的雙CAN總線接口的設(shè)計(jì)。
4.1 DSP芯片介紹
數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)要兼顧速度特性和穩(wěn)定性,TMS320LF2407A是TI公司的一款內(nèi)置CAN模塊的DSP芯片,工作電壓3.3V。它具有內(nèi)在的操作靈活性,高速的運(yùn)算能力等特點(diǎn)。DSP中間控制器就以這款芯片作為主控芯片。
TMS320LF2407A的CAN模塊完全支持CAN2.0A/B協(xié)議,CAN控制器模塊是一個(gè)完全的CAN控制器,具有可編程的位定時(shí)器、中斷配置可編程、可編程的CAN總線喚醒功能、自動(dòng)回復(fù)遠(yuǎn)程請(qǐng)求、總線錯(cuò)誤診斷等功能,可以工作在標(biāo)準(zhǔn)模式和擴(kuò)展模式,內(nèi)置6個(gè)郵箱完成數(shù)據(jù)收發(fā),可進(jìn)行自測試,CAN模塊內(nèi)各部分的結(jié)構(gòu)和功能基本上和流行的PHILIPS增強(qiáng)型CAN控制器SJAl000相同。
4.2 DSP中間控制器上層CAN總線網(wǎng)絡(luò)接口設(shè)計(jì)
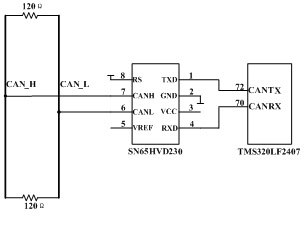
在上層CAN總線網(wǎng)絡(luò)接口設(shè)計(jì)中,核心芯片TMS320LF2407A的CAN模塊完全支持CAN2.0A/B協(xié)議,只需要采用一片CAN收發(fā)器即可方便實(shí)現(xiàn)CAN總線接口。設(shè)計(jì)中采用了TI公司推出的3.3V系列CAN收發(fā)器SN65HVD230D。
SN65HVD230D是TI公司生產(chǎn)的專門針對(duì)240X系列DSP內(nèi)CAN控制器與物理總線的接口。它的供電電壓和TMS320LF2407A一樣,僅為3.3V。SN65HVD230D CAN數(shù)據(jù)線收發(fā)器是為了在控制器之間實(shí)現(xiàn)可靠而有效的雙向數(shù)據(jù)傳輸而設(shè)計(jì)的,它符合CAN總線結(jié)構(gòu)標(biāo)準(zhǔn)ISO11898。該系列器件支持傳輸速率高達(dá)1Mbps的差分信令,同時(shí)還兼容現(xiàn)有信令體系。該器件采用工業(yè)標(biāo)準(zhǔn)的PCA82C250封裝,適合雙終端傳輸線和半雙工操作。該器件輸出轉(zhuǎn)換時(shí)間,或稱轉(zhuǎn)換速率控制,是可編程的,這有助于設(shè)計(jì)人員減小電磁干擾從而提高系統(tǒng)可靠性。其接口設(shè)計(jì)如圖2所示:
4.3 DSP中間控制器下層CAN總線網(wǎng)絡(luò)接口設(shè)計(jì)
下層CAN總線硬件接口電路由主控芯片、CAN控制器、CAN收發(fā)器組成。主控芯片已選用定TMS320LF2407A,所以只需選擇合適的CAN控制器和收發(fā)器即可實(shí)現(xiàn)此接口的設(shè)計(jì)。常用的設(shè)計(jì)方式是選用PHILIPS公司生產(chǎn)的SJA1000作為CAN控制器,同時(shí)選擇PHILIPS公司的PCA82C250芯片作為CAN收發(fā)器,因此本接口設(shè)計(jì)的重點(diǎn)就是要實(shí)現(xiàn)DSP和SJA1000直接的接口設(shè)計(jì)。
TMS320LF2407A芯片的片外引腳一般采用地址線和數(shù)據(jù)線分離的設(shè)計(jì)方法,不再使用地址數(shù)據(jù)分時(shí)復(fù)用線,也沒有ALE地址有效信號(hào),這樣就給CAN控制器與其的接口帶來一定困難。TMS320LF2407A沒有提供與SJA1000 CAN控制器的直接接口信號(hào),以SJA1000的INTEL方式,采用以下幾點(diǎn)設(shè)計(jì)滿足TMS320LF2407A與CAN控制器與SJA1000的接口要求。
a. 地址數(shù)據(jù)復(fù)用線的設(shè)計(jì):將TMS320LF2407A的數(shù)據(jù)線D0~D7作為CAN的地址/數(shù)據(jù)復(fù)用線,用TMS320LF2407A的數(shù)據(jù)線去選擇CAN的內(nèi)部端口和傳送數(shù)據(jù)。
b. 地址有效信號(hào)ALE的產(chǎn)生:用地址線AO、寫選通信號(hào) 和端口選通信號(hào) 的邏輯組合產(chǎn)生TMS320LF2407A的ALE信號(hào)。
c. 讀寫信號(hào)的產(chǎn)生:用讀寫信號(hào)和A0的邏輯組合產(chǎn)生SJA1000的讀選通信號(hào),用寫信號(hào)和A0的邏輯組合產(chǎn)生SJA1000的寫選通信號(hào)。
d. 片選信號(hào)的產(chǎn)生:用TMS320LF2407A的I/O空間選通信號(hào) 和高位地址的譯碼信號(hào)的邏輯組合產(chǎn)生CAN的片選 。
這種方法是將DSP的數(shù)據(jù)線改為適合CAN控制器的數(shù)據(jù)地址線,為此將DSP的A0作為地址數(shù)據(jù)選擇線。AO=1時(shí),地址有效;A0=0時(shí),數(shù)據(jù)有效。即用奇數(shù)地址選擇端口,用偶數(shù)地址傳送數(shù)據(jù)。同時(shí),通過信號(hào)的邏輯組合,在地址有效期間不產(chǎn)生讀寫信號(hào),而產(chǎn)生滿足CAN的地址有效信號(hào)ALE;在數(shù)據(jù)有效期間產(chǎn)生滿足CAN的讀和寫邏輯信號(hào)。在SJA1000和TMS320LF2407A通過一片GAL芯片來實(shí)現(xiàn)接口邏輯轉(zhuǎn)換。
5 結(jié)論
本文結(jié)合CAN總線在航天領(lǐng)域的應(yīng)用狀況,在CAN總線技術(shù)和DSP芯片功能研究的基礎(chǔ)上,設(shè)計(jì)了一種基于CAN總線和DSP的雙層數(shù)據(jù)采集系統(tǒng)。本系統(tǒng)充分利用DSP具有內(nèi)置CAN控制器的優(yōu)勢,設(shè)計(jì)了具有雙CAN總線接口的DSP中間控制器,采用分級(jí)、分層、區(qū)域組合的思想實(shí)現(xiàn)雙層、多區(qū)域數(shù)據(jù)信息的采集。文中給出了本數(shù)據(jù)采集系統(tǒng)的結(jié)構(gòu),并設(shè)計(jì)了DSP中間控制器雙CAN總線網(wǎng)絡(luò)接口的硬件電路,將對(duì)CAN總線在航天領(lǐng)域的廣泛應(yīng)用提供積極的參考。