
1. 引言
對測控現(xiàn)場的被測模擬信號的處理一般常用A/D或V/F轉換技術,兩種方法各有特點:A/D轉換技術一般用于被測信號速率較高,但干擾不是太嚴重的場合,而V/F轉換技術由于具有較強的抗干擾性且便于實現(xiàn)信號的遠傳和隔離,因此往往用于現(xiàn)場的干擾較為嚴重、且信號傳輸距離較遠的場合。但由于V/F變換的采樣速率較低,在對分辨率、采樣速率和抗干擾性要求都較高時,則采用V/F轉換技術往往也難以滿足采樣要求。盡管A/D轉換的采樣速率較高,但由于其抗干擾性較差,從而使系統(tǒng)的可靠性、穩(wěn)定性和測試精度都會受到影響,有時甚至無法正常工作。
本文提出一種采用PWM技術的新型的高性能模數(shù)轉換器的設計方法,利用MCU內部的定時器,結合改進的逐次逼近的對分試探算法,只須采用普通元器件即可設計出具有高分辨率的A/D轉換器,以實現(xiàn)對模擬電壓的測量,通過實驗證明該設計能夠達到較高的精度和分辨率,電路簡單、可靠、成本低、傳輸信號線少,便于遠傳或隔離,抗干擾能力強,具有較好的應用價值。
2. 基于PWM技術的A/D轉換工作原理及接口電路設計
一般模數(shù)轉換包括采樣、保持、量化和編碼四個過程。采樣就是將一個連續(xù)變化的信號x (t) 轉換成時間上離散的采樣信號x (n) 。通常采樣脈沖的寬度tw 是很短的,故采樣輸出是斷續(xù)的窄脈沖。要把一個采樣輸出信號數(shù)字化,需要將采樣輸出所得的瞬時模擬信號保持一段時間,這就是保持過程。量化是將連續(xù)幅度的抽樣信號轉換成離散時間、離散幅度的數(shù)字信號,量化的主要問題就是量化誤差。編碼是將量化后的信號編碼成二進制代碼輸出。這些過程有些是合并進行的。例如,采樣和保持就利用一個電路連接完成,量化和編碼也是在轉換過程同時實現(xiàn)的,且所用時間又是保持時間的一部分[1]。
PWM即脈沖寬度調制,PWM信號是一種周期(T)固定、占空比變化的數(shù)字信號。當對其進行積分或低通濾波后,便可獲得與其脈沖寬度呈正比的模擬電壓,于是將該電壓作為試探值與被測模擬量進行比較便可獲得與被測模擬量相對應的PWM值或數(shù)字量。本設計是利用定時器產(chǎn)生PWM脈沖輸出信號,利用比較器作為試探結果狀態(tài)標志,采用改進的逐次逼近試探算法來實現(xiàn)對被測模擬量的A/D變換。由于一般單片機內部都有定時器,因此可直接利用片內定時器來產(chǎn)生PWM信號即可[2],本設計采用的是MSP430單片機,由于其內部的定時器A具有比較/捕獲功能,且內部具有多個捕獲/比較器:CCR0--CCRn,因此利用這種功能可更方便的產(chǎn)生PWM信號,從而實現(xiàn)A/D轉換。PWM波形的產(chǎn)生是利用定時器A輸出模式中的“復位/置位”模式。例如可利用其中的捕獲/比較器CCR0來控制PWM的周期,而用CCR1通道控制PWM的占空比,從而可方便的獲得PWM信號,如圖1所示“復位/置位”模式輸出示意圖。
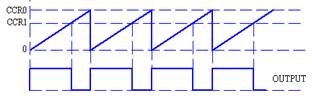
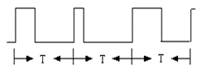
由圖1可知,只要改變CCR1和CCR0的值就可以改變輸出波形的脈沖寬度和脈沖周期,例如,以CCR0信號作為脈沖周期控制,當CCR1的值改變時即可改變PWM信號的脈沖寬度或占空比,輸出信號就是PWM信號。如圖2所示[3]。
若PWM信號的占空比隨時間變化,那么經(jīng)過低通濾波后的輸出信號將是幅度變化的模擬信號,因此通過控制PWM信號的占空比,就可以產(chǎn)生不同的模擬信號。本設計中,采用MSP430單片機的定時器A的CCR0來控制周期,采用CCR1來控制占空比,從而產(chǎn)生所需要的PWM信號。
采用PWM技術的A/D轉換電路設計如圖3、4所示。A/D轉換通過MSP430單片機的內部定時器A產(chǎn)生的PWM信號,通過P23口輸出,經(jīng)過兩級RC低通濾波后得到與其對應的模擬信號,然后通過運算放大器構成的電壓跟隨器進行阻抗變換后,作為試探值送電壓比較器LM393的一端,在比較器的另一端接入被測模擬量,兩信號在比較器中進行比較,通過檢測比較器的輸出電平狀態(tài)即可反映出試探值的大小,由比較器的輸出狀態(tài)調整PWM信號的占空比,產(chǎn)生下一次PWM信號的輸出,于是通過不斷的試探并修正PWM信號的占空比即可使試探值接近或等于被測量,則此時的脈沖值即為被測量的A/D轉換值,可以達到16位的轉換精度。另外,由原理圖4可知,由于整個電路比較簡單且該轉換器與系統(tǒng)的連接只有兩條信號線:即PWM信號輸入線和用于將試探值與被測模擬量進行比較的比較器信號輸出線,因此在進行抗干擾隔離時將很容易實現(xiàn),而在采用普通A/D轉換器的電路中進行抗干擾隔離時則要麻煩的多。
3. 微控制器MCU的選型
為方便使用和操作,本設計不但設計簡單,而且功耗要低,因此經(jīng)多方面綜合、對比決定采用TI公司的具有SOC特點的MSP430系列MCU,這是一種超低功耗的16位混合信號控制器,其內部集成了大量的外圍模塊和溫度傳感器,特別適用于電池供電的手持式設備或需要對環(huán)境溫度進行補償?shù)臏y試儀器。
MSP430單片機采用最新的低功耗技術,工作在1.8~3.6V 電壓下,有正常工作模式( A M ) 和4 種低功耗工作模式;在最小功耗模式下其工作電流僅為0.1μA,而且可以方便地在各種工作模式之間切換。它的超低功耗性在實際應用中, 尤其是在電池供電的便攜式設備中表現(xiàn)尤為突出。在系統(tǒng)初始化后便進入待機模式,當有允許的中斷請求時,CPU 將在6μs的時間內被喚醒, 進入活動模式,執(zhí)行中斷服務程序。執(zhí)行完畢,在RETI 指令之后,系統(tǒng)返回到中斷前的狀態(tài),繼續(xù)低功耗模式。
本設計所采用的是MSP430F1232微控制器,具有非常高的集成度,除內部帶有具有PWM功能的定時器外,片內還集成了10通道的1 0位A / D轉換、溫度傳感器、USART、看門狗定時器、片內數(shù)控振蕩器DCO、大量的具有中斷功能的I/O 端口、大容量的片內Flash 和RAM 以及信息Flash 存儲器[4]。其中的16位定時器A中帶有3個捕獲/比較通道,內部的Flash 存儲器可以實現(xiàn)掉電保護和軟件升級。由此采用MSP430單片機作為該設計的處理器,不但可簡化系統(tǒng)電路設計、縮短開發(fā)周期,降低系統(tǒng)功耗,還可利用其內部集成的溫度傳感器,方便的對被測模擬量進行溫度補償,從而使系統(tǒng)的測試精度得以提高。