用A-GPS" title="GPS">GPS,接收器不必再下載和解碼來自GPS衛(wèi)星的導(dǎo)航數(shù)據(jù),因此可以有更多的時(shí)間和處理能力來跟蹤GPS信號(hào),這樣能降低首次定位時(shí)間" title="首次定位時(shí)間">首次定位時(shí)間,增加靈敏度" title="靈敏度">靈敏度以及具有最大的可用性。
GPS是一種基于衛(wèi)星的定位系統(tǒng),它最初由美國(guó)軍方設(shè)計(jì)并受美國(guó)軍方的控制,可以為任何人免費(fèi)使用。這個(gè)系統(tǒng)是由在6個(gè)中間環(huán)形軌道上運(yùn)行的24顆衛(wèi)星組成,一個(gè)衛(wèi)星環(huán)繞軌道運(yùn)轉(zhuǎn)一周的時(shí)間接近12個(gè)小時(shí)。每個(gè)衛(wèi)星不斷地發(fā)送關(guān)于當(dāng)前時(shí)間、所有衛(wèi)星的位置以及像歷書(almanac)和星歷(ephemeris)這樣的一些相關(guān)數(shù)據(jù)信息。GPS接收器使用這種信息來計(jì)算其自身與衛(wèi)星之間的距離。為確定位置,GPS接收器必須接收來自至少三個(gè)衛(wèi)星的信號(hào)。
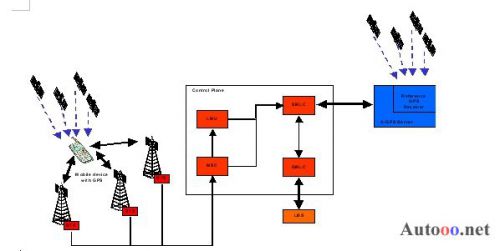
圖1:控制層面上的A-GPS" title="A-GPS">A-GPS。
首次定位時(shí)間(TTFF)很大程度上決定于接收器的接收靈敏度,以及可見衛(wèi)星的數(shù)量、每個(gè)衛(wèi)星信號(hào)的強(qiáng)度、衛(wèi)星在天空中的分布以及接收器對(duì)天空的視角。在一種不利的環(huán)境中,例如信號(hào)較弱的城市高樓間隙或者室內(nèi),某些情況下需要幾分鐘的時(shí)間來計(jì)算位置。這對(duì)于本地服務(wù)(LBS)或者緊急呼叫(E911)來說是不可接受的,這些情況需要一種更快的獲取時(shí)間。為此,人們開發(fā)了輔助型GPS(A-GPS)來解決不利環(huán)境下的TTFF問題。
A-GPS
A-GPS的開發(fā)部分地受到美國(guó)聯(lián)邦通信委員會(huì)(FCC)的E911強(qiáng)制要求能對(duì)緊急呼叫者提供蜂窩電話的定位所推動(dòng)。A-GPS的目的是或者提高TTFF,或者當(dāng)它不能提高TTFF時(shí)使定位運(yùn)算成為可能。
在過去的幾年,在A-GPS這個(gè)關(guān)鍵詞之下開發(fā)出了不同的概念和解決方案,其中很多是受專利保護(hù)的。這些不同的概念可以分成支持型GPS(aided GPS)和輔助型GPS兩類(assisted GPS)。
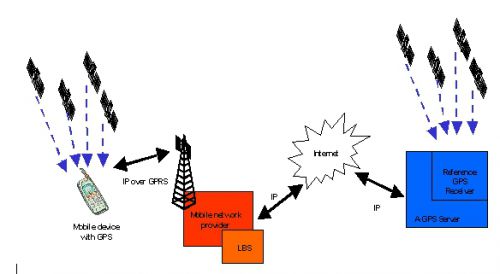
圖2:用戶層面上的A-GPS。
1. 支持型GPS
支持型GPS通過在移動(dòng)網(wǎng)絡(luò)上發(fā)送歷書、星歷、粗略的位置和時(shí)間來提高TTFF。這種支持型數(shù)據(jù)可以在控制層面(control plane)上發(fā)送,或者移動(dòng)網(wǎng)絡(luò)的用戶層面(user plane)上。位置的運(yùn)算大多數(shù)發(fā)生在移動(dòng)設(shè)備上。
2. 輔助型GPS
輔助型GPS使得采用快速TTFF計(jì)算位置成為可能。為實(shí)現(xiàn)這點(diǎn),利用像時(shí)間同步、更準(zhǔn)確的位置、多普勒和頻率這樣的額外信息用來確定位置。這種額外信息可以通過使用移動(dòng)網(wǎng)絡(luò)控制層面的基礎(chǔ)設(shè)備來獲得,像高級(jí)前向鏈路三邊測(cè)量(AFLT)這樣的機(jī)制被用來確定移動(dòng)設(shè)備的位置。這里,信號(hào)從移動(dòng)設(shè)備發(fā)出,幾個(gè)移動(dòng)基站接收并進(jìn)行測(cè)量。位置的計(jì)算可以在移動(dòng)設(shè)備內(nèi)發(fā)生(基于移動(dòng)設(shè)備的),或者在移動(dòng)網(wǎng)絡(luò)服務(wù)器上(基于網(wǎng)絡(luò)的)。
基于移動(dòng)設(shè)備的輔助型GPS解決方案通過移動(dòng)網(wǎng)絡(luò)接收額外的輔助GPS數(shù)據(jù),但是在移動(dòng)設(shè)備上進(jìn)行位置計(jì)算。這意味著LBS或者E911服務(wù)必須從移動(dòng)設(shè)備得到當(dāng)前的位置。
采用基于網(wǎng)絡(luò)的輔助型GPS解決方案,移動(dòng)設(shè)備發(fā)送原始的GPS數(shù)據(jù)到移動(dòng)網(wǎng)絡(luò)中的GPS輔助服務(wù)器。這個(gè)網(wǎng)絡(luò)服務(wù)器可以利用直接來自網(wǎng)絡(luò)的額外輔助GPS信息來計(jì)算位置。在計(jì)算之后,位置數(shù)據(jù)被發(fā)送到接收器。LBS或者E911服務(wù)可以直接訪問網(wǎng)絡(luò)服務(wù)器的位置數(shù)據(jù)庫。
A-GPS的好處是改善TTFF、增加靈敏性以及使可用性最大化,存在這些優(yōu)點(diǎn)是因?yàn)榻邮掌鞑辉俦仨毾螺d和解碼來自GPS衛(wèi)星的導(dǎo)航數(shù)據(jù),接收器可以使用更多的時(shí)間和處理能力來跟蹤GPS信號(hào)。
基于控制層面的A-GPS
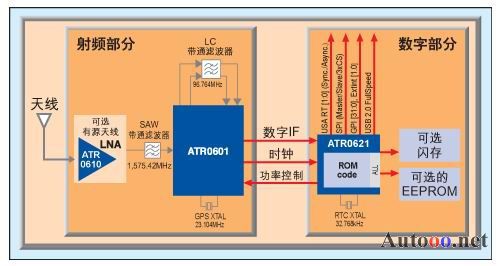
圖3:ANTARIS 4框圖。
控制層面方案利用無線網(wǎng)絡(luò)的功能以及信號(hào)發(fā)送層來從網(wǎng)絡(luò)獲取位置信息,例如蜂窩ID、AFLT或者時(shí)間同步機(jī)制。 CDMA和GSM的蜂窩扇區(qū)都針對(duì)控制層面A-GPS消息發(fā)送開發(fā)出了標(biāo)準(zhǔn)(分別為TIA/IS-801-1和3GPP TS25.331),定義了用戶設(shè)備性能衡量標(biāo)準(zhǔn)(分別為TIA 916和3GPP TS 25.171)。這些標(biāo)準(zhǔn)描述了來自無線網(wǎng)絡(luò)的位置信息如何獲取,以及這個(gè)信息如何用于A-GPS。
當(dāng)在控制層面上使用A-GPS時(shí),定位測(cè)量單元利用在移動(dòng)設(shè)備、幾個(gè)收發(fā)器基站和移動(dòng)交換中心之間的測(cè)量信號(hào)傳輸來獲得位置信息。服務(wù)移動(dòng)定位中心收集這些基于網(wǎng)絡(luò)的位置數(shù)據(jù)以及來自具有幾個(gè)參考GPS 接收器的A-GPS服務(wù)器的數(shù)據(jù),將這種輔助數(shù)據(jù)發(fā)送到移動(dòng)設(shè)備,使移動(dòng)設(shè)備能計(jì)算出準(zhǔn)確的位置。LBS可以通過網(wǎng)關(guān)移動(dòng)定位中心來獲取這個(gè)位置數(shù)據(jù)。采用控制層面方法,基于網(wǎng)絡(luò)或者基于移動(dòng)設(shè)備系統(tǒng)的位置計(jì)算是可能的。基于控制層面的A-GPS系統(tǒng)安裝非常復(fù)雜而成本很高,因?yàn)樾枰芏囝~外的硬件來處理復(fù)雜的協(xié)議,但是這樣的A-GPS系統(tǒng)將具有位置運(yùn)算的大部分好處。
基于用戶層面的A-GPS 用戶層面方案是一種在A-GPS服務(wù)器和移動(dòng)設(shè)備之間的通信都基于全I(xiàn)P數(shù)據(jù)鏈接的A-GPS系統(tǒng),與無線信令層無關(guān)(基于GPRS的IP)。相應(yīng)的標(biāo)準(zhǔn)由開放式移動(dòng)聯(lián)盟(OMA)制定,稱為安全用戶層面定位(SUPL)。當(dāng)在用戶層面上使用A-GPS時(shí),帶GPS接收器的移動(dòng)設(shè)備在移動(dòng)網(wǎng)絡(luò)的用戶層面上通過IP與A-GPS連接。A-GPS服務(wù)器從幾個(gè)參考GPS接收器收集支持?jǐn)?shù)據(jù),例如星歷與歷書。服務(wù)器根據(jù)要求發(fā)送這個(gè)數(shù)據(jù)到移動(dòng)設(shè)備。移動(dòng)設(shè)備的GPS接收器利用這個(gè)支持?jǐn)?shù)據(jù)來進(jìn)行位置運(yùn)算。
圖4:GPS接收器模塊。
LBS可以要求移動(dòng)設(shè)備提供位置信息,這些數(shù)據(jù)將通過IP連接發(fā)送。這種方法比通過控制層面的方法成本低,因?yàn)橐苿?dòng)網(wǎng)絡(luò)提供商對(duì)控制面不需要特別的硬件,而且這種方法對(duì)于所有的移動(dòng)標(biāo)準(zhǔn)都是可以使用的。 GPS芯片組--ANTARIS 4 Atmel最新的GPS芯片組ANTARIS 4包括射頻接收器IC ATR0601、LNA ATR0610和基帶IC ATR0621。這個(gè)芯片組是與u-blox公司緊密合作的結(jié)果,Atmel提供RF芯片/數(shù)字IC技術(shù),u-blox提供GPS軟件技術(shù)。
高增益低噪聲放大器(LNA)使用了Atmel的SiGe技術(shù)設(shè)計(jì)用于GPS應(yīng)用,具有1.6dB的噪聲系數(shù)、高增益(>16dB)、低功率設(shè)計(jì)(< 10mW)的特點(diǎn),以及集成的上電控制和50Ω的輸出匹配。
GPS RF接收器IC具有優(yōu)良的RF性能和小于6.8dB的噪聲系數(shù),對(duì)干擾不敏感,功耗小于40mW。它包括一個(gè)頻率合成器、帶自動(dòng)增益控制(AGC)的中頻放大器和1.5比特的A/D轉(zhuǎn)轉(zhuǎn)器,采用了BiCMOS工藝制造,接收器支持XTO和TXCO。外部必須使用一個(gè)SAW帶通濾波器和一個(gè)分立的IF濾波器(96.764 MHz)連接到RF接收器。 GPS基帶處理器ATR0621包括一個(gè)16通道GPS相關(guān)器,該基帶處理器基于ARM7TDMI處理器內(nèi)核。它有128kB的內(nèi)部SRAM和384kB內(nèi)部ROM,在這個(gè)ROM中包括全部的GPS固件,由u-blox公司授權(quán),用來執(zhí)行基本的GPS處理,包括跟蹤、獲取、導(dǎo)航和定位數(shù)據(jù)輸出。對(duì)于普通的PVT(位置/速度/時(shí)間)應(yīng)用,不需要片外閃存或ROM。固件支持在可選的外部EEPROM中存儲(chǔ)可能的配置設(shè)置,對(duì)于特定的用戶應(yīng)用提供一套軟件開發(fā)套件。基帶具有不同的接口以方便靈活的系統(tǒng)集成(2個(gè)USART、USB 2.0、SPI、GPIO),而且通過不同的省電模式提供先進(jìn)的功率管理。導(dǎo)航的結(jié)果通過USART或者USB接口輸出,使用內(nèi)部NMEA(0183)協(xié)議或者u-blox公司的協(xié)議,后者具有增強(qiáng)的導(dǎo)航信息和控制功能。
ANTARIS 4技術(shù)展現(xiàn)了在任何靜態(tài)的和動(dòng)態(tài)的環(huán)境下的魯棒性能,包括像具有挑戰(zhàn)性的大城市環(huán)境。在不影響導(dǎo)航準(zhǔn)確性的情況下它能提供-158dB靈敏度、支持先進(jìn)的WAAS/EGNOS、良好的獲取性能(例如34秒的冷啟動(dòng)時(shí)間)、優(yōu)良的多徑抑制、4Hz的刷新率、低功耗,而且使系統(tǒng)方案具有最低的材料成本。
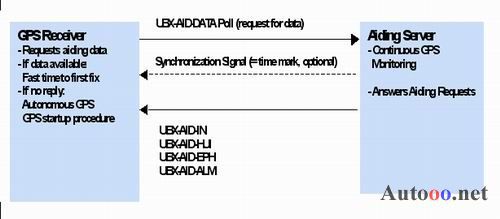
圖5:ANTARIS 4支持的協(xié)議消息。
ANTARIS 4和A-GPS ANTARIS芯片組提供全面的A-GPS功能,例如針對(duì)輔助數(shù)據(jù)在用戶層面上發(fā)送的情形。這種方案對(duì)于需要立即的位置定位應(yīng)用來說,例如通過蜂窩電話的E911緊急呼叫者定位,沒有等待的基于定位的服務(wù)以及移動(dòng)資產(chǎn)跟蹤。來自外部資源的輔助數(shù)據(jù),例如輔助服務(wù)器,減少了第一次準(zhǔn)確的定位確定時(shí)間到僅僅4秒。輔助參數(shù)提供星歷、歷書、粗定位、時(shí)鐘飄逸和時(shí)間、衛(wèi)星狀態(tài),以及如果可能的話,提供一個(gè)精確的時(shí)間同步信號(hào)。這種輔助數(shù)據(jù)提供了GPS接收器用于搜尋和跟蹤的關(guān)于衛(wèi)星的即時(shí)信息,以提高TTFF。
NTARIS 4的協(xié)議具有特殊消息用于A-GPS來與A-GPS服務(wù)器交換輔助數(shù)據(jù)。 根據(jù)輔助數(shù)據(jù)和時(shí)間同步,芯片組的性能將能得到提高: -如果沒有輔助數(shù)據(jù)的話,對(duì)于冷啟動(dòng)一般TTFF為34秒; -沒有時(shí)間同步的情況,對(duì)于輔助型啟動(dòng)TTFF為15到20秒; -對(duì)于時(shí)間同步優(yōu)于8ms的情況,輔助型啟動(dòng)的TTFF時(shí)間一般為12秒; -時(shí)間同步優(yōu)于400us的輔助啟動(dòng)的TTFF時(shí)間一般為4秒。
同樣,靈敏度從-142dBm提高到-145dBm,因?yàn)榻邮掌骺梢詧?zhí)行重新獲取過程。
本文總結(jié):
采用A-GPS,像LBS和E911這樣的新應(yīng)用變得可行。使用輔助數(shù)據(jù)可以實(shí)現(xiàn)微弱信號(hào)的快速獲取,可以推動(dòng)導(dǎo)航解決方案,否則導(dǎo)航方案將不可能實(shí)現(xiàn)。對(duì)于A-GPS來說,技術(shù)已經(jīng)是現(xiàn)成的,應(yīng)用時(shí)機(jī)已經(jīng)來臨。在移動(dòng)網(wǎng)絡(luò)端有兩種可用的方法:用戶層面上的A-GPS適合低成本和快速集成,基于控制層面的A-GPS適合于提供最佳的性能。
