
圖中所示的電路是一個(gè)三位轉(zhuǎn)速計(jì),用來(lái)測(cè)量重復(fù)時(shí)間間隔為0.235至15秒內(nèi)的低頻信號(hào)。轉(zhuǎn)速計(jì)的轉(zhuǎn)速為每分鐘4至255轉(zhuǎn),它應(yīng)用在那些醫(yī)療設(shè)備,這些醫(yī)療設(shè)備中,用來(lái)測(cè)量心跳率、呼吸率、電解磨削、腦電圖、低轉(zhuǎn)速電機(jī)轉(zhuǎn)速或機(jī)械裝置轉(zhuǎn)速之類(lèi)的低頻信號(hào)。
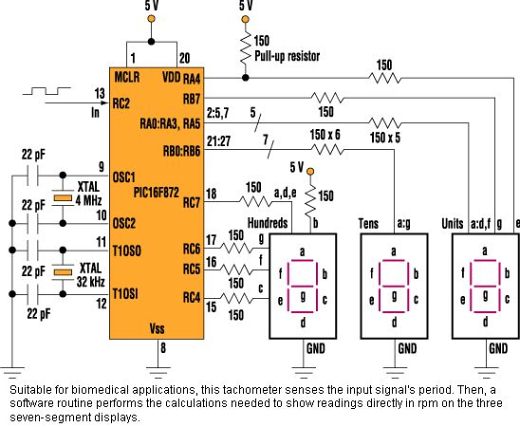
PIC16F872微處理控制處理轉(zhuǎn)速計(jì)的數(shù)據(jù)。PIC感應(yīng)輸入頻率(fin)的周期,計(jì)算出每秒產(chǎn)生的相應(yīng)的脈沖數(shù),并相應(yīng)的更新LED顯示器。輸入信號(hào)需被預(yù)處理成0到5V的直流電壓,脈沖高電平的寬度至少為4μs。
MCU所用等式為RPM = 60/T。T指感應(yīng)輸入的周期,常數(shù)60代表一分鐘(60秒內(nèi))脈沖的讀數(shù)或每分鐘的旋轉(zhuǎn)數(shù)。該電路的時(shí)間基準(zhǔn)是出一個(gè)32kHz的晶振(愛(ài)普生C-001R32.768K-A ±20 ppm)來(lái)提供的,這個(gè)時(shí)間基數(shù)反過(guò)來(lái)觸發(fā)T1(PIC的內(nèi)部定時(shí)器)。T1有一個(gè)可編程的已將其設(shè)為1/8的因子。這一因子產(chǎn)一個(gè)4 kHz的分頻。定時(shí)器T1為16位的定時(shí)器,產(chǎn)生一個(gè)0.00025秒(250 μs)的變化周期。

它是這樣工作的:PIC監(jiān)測(cè)輸入端RC2,等待一個(gè)下降沿。當(dāng)檢測(cè)下降沿時(shí),定時(shí)器T1被TMR1ON位使能。然后,PIC等待下一個(gè)定時(shí)器T1。當(dāng)下一個(gè)定時(shí)器T1到來(lái)時(shí),PIC禁止TMR1ON位以停止讀數(shù)。這時(shí),各自周期的讀數(shù)被存于寄存器TMR1H和TMR1L中。
為避免范圍外的讀數(shù),需要檢測(cè)溢出位TMR1F。如果該位被設(shè)置了,則表明信號(hào)的周期太長(zhǎng)以致不能被測(cè)量。在這種情況下,程序跳至UNDF標(biāo)位,顯示“OUF”或oveRFlow信息。這表明輸入信號(hào)的周期比16.384秒要高。
若沒(méi)有溢出,我們就要校驗(yàn)檢測(cè)周期,使其等于或高于940(相當(dāng)于 255 rpm)。如果讀數(shù)低于940,程序就要跳到OVERF標(biāo)位,顯示信息將為"00F",這表明讀數(shù)高于255 rpm。
若這一值大于940,則利用常規(guī)DIVS被4除。DIVS帶有產(chǎn)生兩個(gè)16位數(shù)字的兩對(duì)寄存器(ACCb和 ACCa)。為了獲得這一周期,所用公式為ACCb/ACCa = ACCb,60,000 (EA60H)再一次利用常規(guī)DIVS被ACCb除。這樣我們就得到了二進(jìn)制的rpm值。我們必須將這個(gè)二進(jìn)制轉(zhuǎn)換為BCD碼。
為了實(shí)現(xiàn)這一操作,我們將讀數(shù)轉(zhuǎn)移至W,然后調(diào)用常規(guī)的BINBCE。BINBCE通過(guò)寄存器R0, R1, 和R2(R2是最具意義的信號(hào)數(shù))將二進(jìn)制轉(zhuǎn)換為BCD碼。最后,將每一個(gè)寄存器內(nèi)的數(shù)據(jù)轉(zhuǎn)換成七段碼,使之能在LED顯示屏上顯示。兩個(gè)計(jì)算表SEGM 和 SEGM2完成這個(gè)七段碼操作,其中SEGM2負(fù)責(zé)處理百位數(shù)位。
定時(shí)器T1通過(guò)軟件被輸入端RC2的輸入信號(hào)的上升沿使能。當(dāng)下一個(gè)上升沿到來(lái)時(shí),T1被禁止。這樣,T1就有了一個(gè)與輸入信號(hào)周期對(duì)應(yīng)的二進(jìn)制計(jì)數(shù)。因其變化周期為0.00025秒(250 μs),我們必須將其右移三位以獲得0.25秒的時(shí)間。這樣,新的rpm等式將為RPM = 60000/T。
表中顯示如何獲得轉(zhuǎn)數(shù)/分(rpm)讀數(shù),從包含了周期讀數(shù)的計(jì)數(shù)器(T1)開(kāi)始。例如,若PIC檢測(cè)到一個(gè)周期為1秒的信號(hào),因?yàn)閮?nèi)部頻率分配器被設(shè)為4,所以計(jì)數(shù)器的讀數(shù)將等于1000(十進(jìn)制)。這個(gè)信號(hào)的最終rpm讀數(shù)將等于60。