
1 引言
在十字路口處,為了避免交通阻塞,,保證交通安全,,規(guī)定交通車輛必須按道行駛而不得越道。因此,,必須采用相應(yīng)的感測裝置,,監(jiān)控車輛的違規(guī)越道行為。目前,,對闖紅燈行為的記錄處理大多是依靠在等待線下安裝相應(yīng)的感測裝置,,當有車經(jīng)過時,,即刻發(fā)出特定信號,系統(tǒng)根據(jù)該信號進行判斷處理,,再通過路口攝像頭對違章車輛進行拍照記錄,。也可采用類似方法探測車輛越道行為,即利用埋入地下的感測裝置,。但由于感測裝置的大小和形狀受分道行駛標記線寬度的限制,,為了有效探測車輛越道行駛行為,對測量靈敏度提出更高要求?,F(xiàn)行方案一般采用單片機測量頻率,,其靈敏度低,抗干擾能力差,,這是因為單片機測量頻率在一定時間t內(nèi)統(tǒng)計脈沖信號數(shù),,根據(jù)脈沖數(shù)的變化反映頻率變化。假設(shè)傳感振蕩電路的頻率為100 kHz(該值已接近實際應(yīng)用極限,,若再增大振蕩頻率,,將會向外發(fā)射能量,對周圍產(chǎn)生電磁干擾),,如果統(tǒng)計時間t=l ms,,則可記錄100個脈沖,此時靈敏度的最大理論值能達到1%,,但實際上除去不穩(wěn)定因素的影響,,靈敏度不可能太高;如果統(tǒng)計時間延長到10 ms,,則靈敏度的最大理論值能達到0.1%,,這樣不僅影響反映速度,而且實際值也照樣打折扣,,所以靈敏度仍不能達到實際應(yīng)用要求,。
雖然使用單片機探測車輛也曾有過一些改進方案,但都很難從根本上提高探測靈敏度,。為此,,提出一種利用鎖相環(huán)技術(shù)提高感測裝置靈敏度及抗干擾能力的設(shè)計方案。實驗證明,,該設(shè)計方案能夠達到實際應(yīng)用要求,。
2 鎖相環(huán)原理
“鎖相”就是相位同步的自動控制。能夠完成兩個電信號相位同步的自動控制閉環(huán)系統(tǒng)叫做鎖相環(huán),。鎖相環(huán)廣泛應(yīng)用于廣播通信,、頻率合成、自動控制及時鐘同步等技術(shù)領(lǐng)域,。
鎖相環(huán)(Phase-Locked Loop,,簡稱PLL)主要是由鑒相器(Phase Detector,,簡稱PD)、壓控振蕩器(Voltage ControlledOsillator簡稱VCO),、環(huán)路濾波器(Loop Filter,,簡稱LF)3部分組成。PD為相位比較裝置,,用于比較輸入信號Ui(t)與VCO的輸出信號Uo(t)的相位,,產(chǎn)生對應(yīng)于兩個相位差信號的誤差電壓Ue(t)。LF用于濾除Ue(t)中的高頻成分和噪聲,,以保證環(huán)路所要求的性能,,增加系統(tǒng)的穩(wěn)定性。壓控振蕩器受控制電壓Ud(t)的控制,,用于將LF的頻率向輸入信號的頻率靠攏,,直至消除頻差而鎖定。
PLL的工作原理是:比較Ui(t)與Uo(t)之間的相位差,,產(chǎn)生Ue(t)調(diào)整VCO的頻率,,以達到與Ui(t)同頻。在環(huán)路開始工作時,,如果輸入信號頻率fi與壓控振蕩器頻率fVCO不同,,則因fi與fVCO之間存在固有頻率差,而使相位差一直變化,,導(dǎo)致PD輸出的誤差電壓UPD在一定范圍內(nèi)變化,。在該誤差電壓的控制下,fVCO也發(fā)生變化,。若fVCO能夠與fi相等,,則在滿足穩(wěn)定性條件下應(yīng)穩(wěn)定在該頻率,穩(wěn)定后,,fUi(t)-fUo(t)=0,,相位差不隨時間變化,且Ue(t)為固定值,,這時環(huán)路就進入鎖定狀態(tài)。
3 系統(tǒng)設(shè)計
3.1 傳感電路
圖1給出正弦波振蕩電路,。它為電容三點式電路,,也即考畢茲振蕩電路。傳感電路用于感應(yīng)出金屬物體的存在,。設(shè)計中采用已實際應(yīng)用的渦流傳感方法,,將埋入地下的探測線圈直接接入正弦振蕩電路,即振蕩電路輸出的頻率帶有傳感信號,。
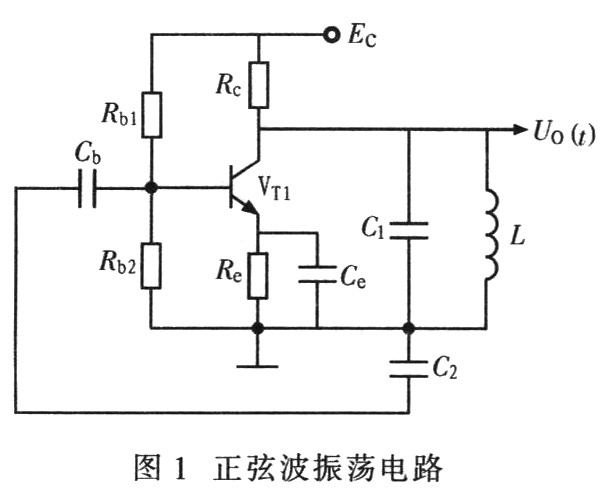
圖1電路中:Rbl=Rb2=62 kΩ,;Rc=1 kΩ,;Re=2.2 kΩ;Ce=Cb=10μF,;C1=C2=0.1μF,;L為電感線圈,此時晶體管VT1為共射放大組態(tài),,工作在放大狀態(tài),。
系統(tǒng)正常狀態(tài)下即無車經(jīng)過時,傳感振蕩電路的輸出信號us(t)為頻率保持不變(f=f0)的正弦波,。當有車經(jīng)過時,,us(t)的頻率變大,即f=f',,其頻率差為△f=f'-f0,,范圍大概在幾百赫茲到幾千赫茲。該電路的振蕩頻率f為:

由式(1)可見,,f與電路中電感L,、電容C1,C2有關(guān)(C1,,C2為固定值),,所以f為L的單值函數(shù),當L發(fā)生變化時,,該振蕩電路的振蕩頻率也發(fā)生反方向變化,。把地線圈作為L,直接連接到電路中,,通過檢測電路振蕩頻率的變化來反映L的變化,,從而實現(xiàn)對金屬物體的探測。
設(shè)正常狀態(tài)下即無車經(jīng)過時的輸出信號頻率為f0,,有車經(jīng)過時的振蕩頻率為f’,,則易獲知:f’>f0。由于f’不易通過固定公式直接計算,,而只能通過實驗法大概估算,,而且實際應(yīng)用中無需知道f’的具體數(shù)值,只需估計△f=f’-f0的范圍即可,。
3.2 探測電路
3.2.1 PLL電路設(shè)計
通過檢測鎖相環(huán)判定是否有車輛經(jīng)過,。當車輛移動到埋入地下的線圈上時,傳感電路的輸出頻率發(fā)生變化,,PLL失鎖,,通過檢測該失鎖信號即可得知是否有車越道。因為該探測電路是以相對頻率變化而不是絕對頻率變化來判斷是否有車輛經(jīng)過,因此具有自我調(diào)節(jié)能力,,不會因為周圍的電磁環(huán)境改變而失效,。
在該設(shè)計中PLL用于跟蹤傳感電路輸出信號的頻率變化,產(chǎn)生本振信號u1(t),,具體要求是:
(1)在us(t)的頻率變化范圍(f0~fmax)內(nèi),,PLL鎖定換句話說,PLL的中心頻率應(yīng)設(shè)定在f0與fmax的之間,,且PLL的“捕捉范圍”應(yīng)大于或至少等于us(t)的頻率變化范圍,。這樣就保證當頻率發(fā)生變化時,PLL始終能夠達到鎖定狀態(tài),。
(2)PLL建立的鎖定時間不能太長或太短如果建立的鎖定時間太短,,PLL很快鎖定,不能看到差頻信號,。如果建立的鎖定時間太長,,PLL很難從失鎖狀態(tài)恢復(fù)到鎖定狀態(tài),使得反映速度變慢,。因此要選擇適當?shù)姆e分電阻R和C,,選擇適當?shù)逆i定時間。
該設(shè)計選用了集成鎖相環(huán)CD4046來實現(xiàn),。圖2為其連接電路,。根據(jù)CD4046的工作原理,其中心頻率是由引腳6,,7之間的C1及引腳11的接地電阻R1決定的,,所以要選擇適當?shù)腞1,C1,,使得PLL的中心頻率達到要求,。為了增加PLL中心頻率的可調(diào)性,在R1上串聯(lián)一只可變電阻R2,。因為這里的PLL對輸入頻率的寬度無要求,,所以引腳12懸空。
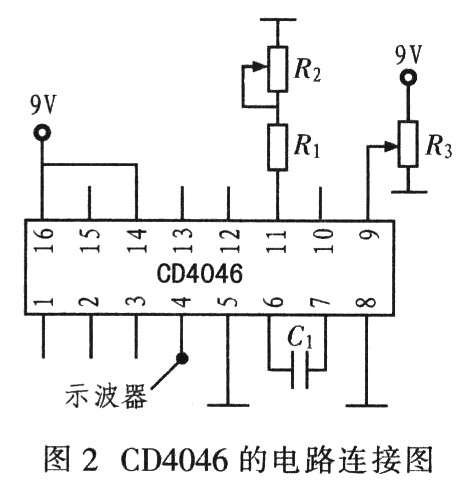
按照圖2所示,,調(diào)節(jié)可變電阻R3,,使得引腳9的電壓U9=Ucc/2=4.5 V,此時引腳4的輸出頻率即為PLL的中心頻率,。選取C1=1 000 pF,,R1=5.1 kΩ,R2=10 kΩ,,此時中心頻率f0=23.7 kHz,剛好滿足系統(tǒng)要求。
3.2.2 確定建立鎖定時間
根據(jù)鎖相環(huán)CD4046的工作原理,,建立鎖定時間則由引腳13(或引腳2)與引腳9之間的積分電阻電容決定,。引腳13的輸出通過積分電容C2充放電,使得U9發(fā)生變化,,從而調(diào)節(jié)VCO的輸出,,即引腳4的輸出頻率。
4 實驗及其結(jié)果分析
為了驗證設(shè)計的可行性,,在實驗室做了驗證試驗,。車輛和線圈都按相同比例縮小。采用直徑為5 mm的普通,,電線繞了100 cmx2 cm的線圈(匝數(shù)n=16),,用于模擬實際應(yīng)用的地線圈;再用一塊20 cmxl0 cm的矩形金屬板模擬實際的車輛,。實驗證明,,正常狀態(tài)下的輸出頻率f0=23.7 kHz,有車經(jīng)過時的最大輸出頻率(將金屬板完全放在線圈上時所測得值)為fmax=24.5 kHz,,因此△fmax=0.8 kHz,。
改變金屬板到線圈的垂直距離,測量金屬板移動到線圈上方后PLL的輸出頻率,。實驗結(jié)果表明,,金屬板距離線圈越近,PLL的輸出頻率越大,。利用示波器觀察PLL從失鎖到鎖定的狀態(tài)發(fā)現(xiàn),,在金屬板距離線圈2~15 cm時,均能觀察到明顯的從失鎖到鎖定的變化,。當金屬板長時間靜止于線圈上時,,PLL也均能恢復(fù)鎖定狀態(tài)。金屬板到線圈的垂直距離,,對應(yīng)于實用中車輛底盤到地下線圈的距離,,按相應(yīng)比例看,實驗所能測量的范圍完全能滿足實用的需要,。因為實驗是通過觀察示波器判定PLL失鎖的,,為了效果明顯,則設(shè)定的鎖定時間較長,。實用中可采用其他方式檢測PLL失鎖,,以判定有車經(jīng)過,可調(diào)整相應(yīng)的電路參數(shù),,使鎖定時間變得更短,,探測靈敏度也會相應(yīng)提高。實驗證明,利用PLL實現(xiàn)的探測靈敏度完全達到系統(tǒng)要求,。
5 結(jié)語
采用鎖相環(huán)技術(shù)實現(xiàn)的車輛檢測技術(shù)比現(xiàn)行采用單片機計數(shù)的車輛檢測技術(shù)可靠性更高,,而且通過檢測鎖相環(huán)失鎖判定是否有車量經(jīng)過,是以相對的頻率變化而非絕對的頻率變化進行判斷,,因此具有自我調(diào)節(jié)能力,,不會因為周圍電磁環(huán)境的改變導(dǎo)致中心頻率偏移而失效。因此本文提出的鎖相環(huán)技術(shù)在提高靈敏度方面確有明顯效果,,而且成本低,,具有廣泛的應(yīng)用前景。
利用現(xiàn)有的技術(shù)設(shè)計傳感電路,,用于初步探測車輛,。而檢測電路把傳感電路的輸出信號轉(zhuǎn)變?yōu)榭芍苯语@示或測量的電信號,以便系統(tǒng)進一步處理,。這部分設(shè)計采用鎖相環(huán)技術(shù)實現(xiàn),。