
摘 要: 介紹了基于Motorola公司新一代HSC12系列16位MCU——MC9S12DP256微處理器開發(fā)的轎車ABS/ASR" title="ABS/ASR">ABS/ASR集成控制系統(tǒng)" title="控制系統(tǒng)">控制系統(tǒng),詳細(xì)描述了該集成控制系統(tǒng)硬件電路和軟件邏輯的構(gòu)成。通過實車試驗,證明控制效果良好,為轎車的主動安全控制裝置集成化打下了基礎(chǔ)。
關(guān)鍵詞: MC9S12DP256 ABS ASR 集成控制
汽車驅(qū)動防滑系統(tǒng)(Anti-slip Regulation System,簡稱ASR)是在汽車制動防抱死系統(tǒng)(Antilock Braking System,簡稱ABS)的基礎(chǔ)上發(fā)展起來的。在裝備了ABS的汽車上添加發(fā)動機(jī)輸出力矩的調(diào)節(jié)功能和驅(qū)動輪制動壓力的調(diào)節(jié)功能后,ABS所用的車輪轉(zhuǎn)速傳感器和壓力調(diào)節(jié)器可全部為ASR所利用[1]。ASR和ABS在算法上很相似,許多程序模塊可以通用,因而在實際應(yīng)用中可以把兩者集成在一個控制器中,組成ABS/ASR集成系統(tǒng)。
1 轎車ABS/ASR集成控制系統(tǒng)簡介
通過對捷達(dá)GTX試驗樣車的液壓制動系統(tǒng)進(jìn)行改造,實現(xiàn)了可以獨立調(diào)節(jié)四個輪缸壓力的ABS/ASR集成系統(tǒng)液壓執(zhí)行機(jī)構(gòu)" title="執(zhí)行機(jī)構(gòu)">執(zhí)行機(jī)構(gòu)[2]。在此基礎(chǔ)上,開發(fā)了一種轎車ABS/ASR集成控制系統(tǒng),主要包括控制系統(tǒng)ECU、傳感器、執(zhí)行機(jī)構(gòu)三個部分。圖1為轎車ABS/ASR集成控制系統(tǒng)示意圖。
當(dāng)汽車正常行駛時,ABS/ASR集成控制系統(tǒng)的ECU實時采集和處理傳感器信號,并根據(jù)其所提供的信息,選用不同的控制方式對汽車進(jìn)行控制。控制的方式包括調(diào)節(jié)車輪輪缸壓力的制動力矩控制模式和調(diào)節(jié)發(fā)動機(jī)輸出力矩的節(jié)氣門開度控制模式。ABS和ASR子系統(tǒng)功能的實現(xiàn)就是對以上兩種控制方式適當(dāng)組合和合理控制的結(jié)果。
2 ABS/ASR集成控制系統(tǒng)的ECU
2.1 MCU的選取
MCU是ABS/ASR集成控制系統(tǒng)的核心,它負(fù)責(zé)數(shù)據(jù)的采集和處理、所有的邏輯運算以及最終控制的實現(xiàn)。考慮到集成控制系統(tǒng)對其運算能力、存儲空間、I/O" title="I/O">I/O接口的要求以及后續(xù)集成其它系統(tǒng)的目的,選擇了功能強(qiáng)大的Motorola新一代HSC12系列16位MCU——MC9S12DP256。
它具有很強(qiáng)的運算能力、豐富的I/O接口和充裕的存儲空間。采用STAR12 CPU,核心運算能力可以達(dá)到50MHz,總線速度可以達(dá)到25MHz,采用優(yōu)化的指令集,指令的運算速度得到了很大的提高。通過片內(nèi)的PLL功能可以方便地選擇MCU的核心頻率而不管外部晶振頻率為多少。片內(nèi)集成了256K FLASH、12K RAM和4K EEPROM,完全可以滿足程序?qū)Υ鎯臻g的要求。它有豐富的I/O接口,包括兩個異步串行通訊接口(SCI),三個同步串行通訊接口(SPI),八通道輸入捕捉/輸出比較(IC/OC),十六個10位A/D接口,八路8位PWM,二十九路獨立的數(shù)字I/O接口,二十路帶中斷和喚醒功能的數(shù)字I/O接口,五路CAN總線接口,一個IIC總線接口,一個BDLC(J1850)接口[3]。
該MCU有四路輸入捕捉(帶有保持緩沖器),利用獨立的ECT捕捉時鐘可以自行完成兩個脈沖間的周期計算,非常適合進(jìn)行四個車輪的輪速采集,大大提高了MCU的工作效率。
2.2 ECU硬件電路設(shè)計
MCU的外圍電路采用模塊化設(shè)計思想,即把電控單元劃分成不同的模塊,將比較成熟固定的模塊組成一塊單獨的電路板,研究過程中變化較大的模塊組成另一塊單獨的電路板,板與板之間通過I/O擴(kuò)展插槽進(jìn)行通信。這種設(shè)計方法有利于試驗過程中對系統(tǒng)的維護(hù)和擴(kuò)展,例如需要更改電路或者對系統(tǒng)進(jìn)行擴(kuò)展時,無需重新設(shè)計整塊電路,只需在相應(yīng)模塊上改變或添加即可;模塊化設(shè)計也具有更好的電氣特性,例如,驅(qū)動模塊是比較大的干擾源,對A/D轉(zhuǎn)換和MCU的工作影響很大,可放在不同的電路板上,對信號線采取隔離措施即可。
根據(jù)ABS/ASR集成控制系統(tǒng)的特點,將整個電控單元分為了A板和B板,兩塊電路板之間通過I/O總線擴(kuò)展插槽連接。
A板主要包括主控芯片MC9S12DP256及其最小系統(tǒng)外圍電路、通訊接口電路和數(shù)據(jù)采集電路,如圖2所示。

MC9S12DP256最小系統(tǒng)外圍電路包括電源模塊、外圍復(fù)位電路、時鐘晶振電路、工作模式選擇等。
通訊接口電路包括BDM接口。兩路SCI串口通訊接口電路,其中一路通過硬件跳線選擇連接故障診斷驅(qū)動芯片MC33199,利用PCA82C250驅(qū)動芯片引出兩路CAN通訊節(jié)點,預(yù)留給集成控制系統(tǒng)擴(kuò)展使用。
A板還包括ECU中的數(shù)字量、模擬量和開關(guān)量采集處理電路,主要包括四個輪速信號、節(jié)氣門開度信號、加速踏板開度信號、高壓蓄能器壓力傳感器信號、制動踏板" title="制動踏板">制動踏板開關(guān)信號等。
B板主要包括執(zhí)行機(jī)構(gòu)驅(qū)動電路和開關(guān)量信號處理電路,如圖3所示。
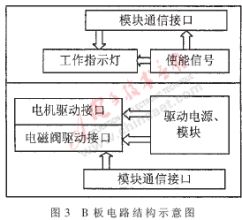
系統(tǒng)驅(qū)動的執(zhí)行機(jī)構(gòu)主要包括ABS壓力調(diào)節(jié)器的四個常開進(jìn)油閥、四個常閉出油電磁閥、四個ASR電磁閥和一個ABS電機(jī)。
ABS和ASR子系統(tǒng)的使能信號及工作指示燈部分的相關(guān)電路也放在該電路板上。
2.3 ECU控制軟件設(shè)計
ABS/ASR集成控制系統(tǒng)中ABS和ASR子系統(tǒng)本身都是復(fù)雜的控制系統(tǒng)。軟件系統(tǒng)的集成并不是把ABS和ASR控制系統(tǒng)簡單地疊加,而是要把它們有機(jī)地融合,同時還要考慮到軟件運行的實時性、可靠性等問題。
集成控制系統(tǒng)的控制軟件主要由系統(tǒng)初始化模塊、啟動自檢模塊、主控制模塊、制動踏板中斷服務(wù)程序模塊等幾大部分組成,總體框圖如圖4所示。

系統(tǒng)初始化模塊在系統(tǒng)上電復(fù)位時對系統(tǒng)進(jìn)行初始化。初始化內(nèi)容包括MCU內(nèi)部的時鐘、各端口設(shè)置、串行通訊接口、模擬和數(shù)字通道、看門狗定時器、系統(tǒng)變量等,以保證MCU正常運行。另外還包括對集成系統(tǒng)的執(zhí)行機(jī)構(gòu)進(jìn)行復(fù)位,確保車輛的安全行駛。
啟動自檢模塊是在系統(tǒng)初始化后對關(guān)鍵軟、硬件部分進(jìn)行靜態(tài)檢測,以判斷系統(tǒng)的軟、硬件工作是否正常。如果發(fā)現(xiàn)集成控制系統(tǒng)中存在故障,故障警示燈會持續(xù)點亮。
主控制模塊為ABS/ASR集成控制系統(tǒng)的控制主程序,見圖4中陰影虛線框。主控制模塊通過實時中斷RTI做固定周期20ms的循環(huán),連續(xù)調(diào)用故障診斷模塊、數(shù)據(jù)處理模塊、參考車速計算模塊、路面識別模塊和車輛運動狀態(tài)識別模塊,實時進(jìn)行車輛運動狀態(tài)和外界環(huán)境的判斷。然后依據(jù)車輛當(dāng)前的運行狀態(tài),由控制執(zhí)行模塊分別進(jìn)行ABS或ASR的邏輯門限值控制。
考慮到駕駛員制動動作與ASR制動干預(yù)控制的緊急切換需要,設(shè)計了制動踏板中斷服務(wù)程序。當(dāng)采集到制動踏板觸發(fā)的中斷時,進(jìn)入制動踏板中斷服務(wù)程序,如果集成控制系統(tǒng)處于ASR工作方式,立即退出當(dāng)前控制,對執(zhí)行機(jī)構(gòu)模塊進(jìn)行復(fù)位,恢復(fù)常規(guī)制動方式,不干預(yù)駕駛員的制動動作,保證了車輛行駛的安全性。
3 試驗結(jié)果與分析
利用所開發(fā)的采集系統(tǒng)[4]和本文所設(shè)計的ABS/ASR集成控制系統(tǒng),在捷達(dá)GTX試驗車上進(jìn)行了典型工況ABS和ASR試驗,驗證其控制效果。
?

?
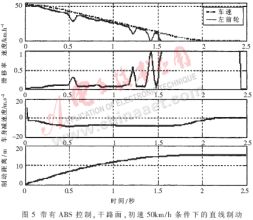
ABS試驗選擇在干柏油路面、制動初速度為50km/h的條件下進(jìn)行,圖5為帶有ABS控制的直線制動過程。圖中顯示了車輛左前輪速度變化的過程,在整個制動過程中與車速都能夠比較好地逼近,車輪的滑移率也被控制在比較理想的區(qū)域內(nèi),保證了車輛制動過程中方向的穩(wěn)定性。
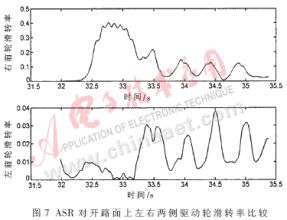
ASR試驗選擇一擋對開路面起步過程,右側(cè)車輪位于低附著系數(shù)路面上。圖6為起步過程中左右兩側(cè)驅(qū)動輪轉(zhuǎn)速對比,其中曲線1為右側(cè)驅(qū)動輪車速,曲線3為左側(cè)驅(qū)動輪車速,曲線2為非驅(qū)動輪車速,可近似認(rèn)為是車身速度。可以看到起步初期,右側(cè)驅(qū)動輪發(fā)生明顯的滑轉(zhuǎn),在33.5秒附近ASR開始調(diào)節(jié),車輪的滑轉(zhuǎn)明顯改善。圖7為起步過程中左右兩側(cè)驅(qū)動輪滑轉(zhuǎn)率的變化曲線,更明顯地反映出進(jìn)行ASR控制后,右側(cè)滑轉(zhuǎn)驅(qū)動輪的滑轉(zhuǎn)率被控制在較為理想的范圍內(nèi)。同時,由于制動干預(yù)的影響,左側(cè)驅(qū)動輪的滑轉(zhuǎn)率略有上升。
通過實車試驗,說明ABS/ASR集成控制系統(tǒng)中的ABS和ASR功能都取得了比較理想的控制效果,為其它底盤主動安全控制系統(tǒng)的集成創(chuàng)造了條件。
?
參考文獻(xiàn)
1 Akihiko Sekiguchi, Toshifumi Maechara. ASR Built in an Add-On ABS[J]. SAE Technical Paper Series 930506,1993
2 崔海峰. 可主動調(diào)節(jié)四個輪缸壓力的ABSASR集成液壓系統(tǒng)[J]. 液壓與氣動,2005(4)
3 MC9S12DP256B Device User’s Guide V02.11.Motorola Inc. USA,2002
4 時開斌.汽車ABS/ASR/ACC集成化數(shù)據(jù)采集系統(tǒng)開發(fā)與ABS控制邏輯研究: [碩士學(xué)位論文].北京:北京理工大學(xué),2003