微電子技術(shù)的持續(xù)發(fā)展使得FPGA具有更高的系統(tǒng)集成度和工作頻率。系統(tǒng)性能較大程度上決定于系統(tǒng)的時(shí)鐘延遲和偏斜。由于FPGA具有豐富的可編程邏輯資源及時(shí)鐘網(wǎng)絡(luò),隨之而來的時(shí)鐘延遲問題使得用戶設(shè)計(jì)的性能大打折扣。FPGA中的DLL模塊可提供零傳播延時(shí),消除時(shí)鐘偏斜,從而進(jìn)一步提高了FPGA的性能和設(shè)計(jì)的靈活性。
PLL是常用的時(shí)鐘管理電路,主要是基于模擬電路設(shè)計(jì)實(shí)現(xiàn)的,而DLL主要是基于數(shù)字電路設(shè)計(jì)實(shí)現(xiàn)的。雖然在時(shí)鐘綜合能力上比PLL差,但由于具有設(shè)計(jì)仿真周期短,抗干擾性強(qiáng),以及工藝可移植等特點(diǎn),DLL非常適合在數(shù)字系統(tǒng)架構(gòu)中使用,這也是FPGA采用DLL作為時(shí)鐘管理的原因。文中將介紹傳統(tǒng)FPGA片內(nèi)延時(shí)鎖相環(huán)設(shè)計(jì),并在此基礎(chǔ)上提出具有更快鎖定速度的新延時(shí)鎖相環(huán)架構(gòu)OSDLL。
1 FPGA片內(nèi)DLL結(jié)構(gòu)及工作原理
1.1 DLL架構(gòu)設(shè)計(jì)
圖1為FPGA片內(nèi)DLL結(jié)構(gòu)框圖。圖1中FPGA片內(nèi)用戶設(shè)計(jì)的時(shí)序邏輯部分在布局布線后,位于芯片中部,相應(yīng)的時(shí)鐘走線較長。為緩解時(shí)鐘緩沖、重負(fù)載時(shí)鐘線的大電容、線路的傳播延時(shí)等因素造成的時(shí)鐘偏斜,可以選擇使用DLL模塊進(jìn)行時(shí)鐘優(yōu)化管理。
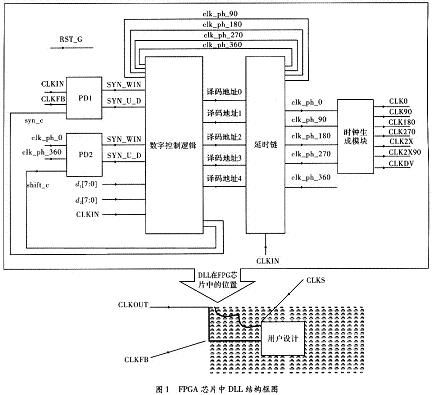
圖1中,DLL主要由鑒相器(PD)、可調(diào)延時(shí)鏈、數(shù)字控制邏輯以及時(shí)鐘生成模塊組成。CLKOUT為DLL輸出時(shí)鐘,即時(shí)鐘生成模塊的輸出時(shí)鐘;CLKS為經(jīng)過時(shí)鐘線后到達(dá)時(shí)序電路的偏斜時(shí)鐘;CLKFB即為CIKS,反饋時(shí)鐘CLKFB反饋回DLL。DLL的功能為通過在時(shí)域中調(diào)節(jié)CLKOUT的相位使得CLKFB與CLKIN同步,即消除時(shí)鐘偏斜。
1.2 DLL工作原理
DLL的工作過程依賴于控制邏輯的設(shè)計(jì)。DLL的控制邏輯主要包括SHIFT控制邏輯和SYN控制邏輯兩部分,如圖2所示。DLL的工作過程首先進(jìn)行SHIFT階段,之后進(jìn)行SYN階段。
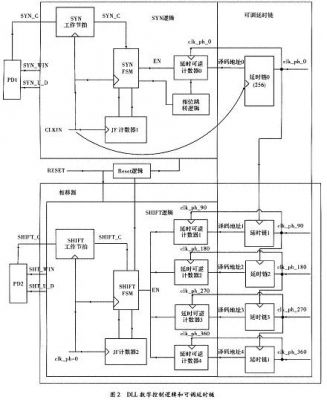
從圖2可見,可調(diào)延時(shí)鏈共5條,即一條主可調(diào)延時(shí)鏈(延時(shí)鏈0,256個(gè)延時(shí)單元),4條子可調(diào)延時(shí)鏈(延時(shí)鏈1~4,各128個(gè)延時(shí)單元)。如圖2所示,4條子延時(shí)鏈,SHIFT邏輯和一個(gè)鑒相器(PD2)構(gòu)成相移器。SHIFT階段,相移器工作。相移器采集第一級(jí)子延時(shí)鏈的輸入時(shí)鐘clk_ph_0和最后一級(jí)延時(shí)鏈的輸出時(shí)鐘clk_ph_360,根據(jù)鑒相結(jié)果同步調(diào)整4條子可調(diào)延時(shí)鏈的延時(shí),直至clk_ph_O和clk_ph_360同步。經(jīng)過相移器的時(shí)鐘延時(shí)是一個(gè)周期,從而使得時(shí)鐘經(jīng)過相移器中的每個(gè)子延時(shí)鏈的輸出時(shí)鐘相移90°,對(duì)應(yīng)圖2中分別為clk_ph_O,clk_ph_90,clk_ph_180,clk_ph_270,clk_ph_360。這些相移的時(shí)鐘可以根據(jù)實(shí)際的需要由時(shí)鐘生成模塊產(chǎn)生所需要分頻(CLKDV),倍頻(CIK2X)或移相時(shí)鐘作為輸出時(shí)鐘,關(guān)于分頻和倍頻電路,如文獻(xiàn)。SYN邏輯用于控制將反饋時(shí)鐘和輸入時(shí)鐘調(diào)整至同步。
整個(gè)SHIFT階段和SYN階段都是在各自的控制邏輯模塊控制下工作的,以一定的工作節(jié)拍實(shí)施調(diào)整,如圖3所示。
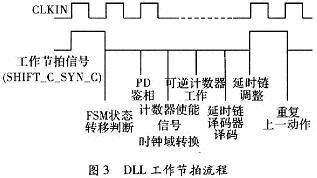
圖2中工作節(jié)拍模塊生成工作節(jié)拍信號(hào)(SHIFT_C,SYN_C)。在工作節(jié)拍下,狀態(tài)機(jī)處于某一狀態(tài),則根據(jù)狀態(tài)的調(diào)整要求依次進(jìn)行如下操作:鑒相,判斷出輸入時(shí)鐘和反饋時(shí)鐘的相位關(guān)系為超前或滯后(SHT_U_D)或SYN_U_D),同時(shí)還可以指示兩時(shí)鐘是否進(jìn)入鎖定窗(SHT_WIN,SYN_WIN),如圖l所示。鑒相器將這些信息送入控制邏輯模塊,在SHIFT階段,4條延時(shí)鏈對(duì)應(yīng)各自的可逆計(jì)數(shù)器,負(fù)責(zé)控制延時(shí)鏈加減延時(shí)單元,各計(jì)數(shù)器工作在自己的時(shí)鐘域中,如圖2所示。根據(jù)鑒相的結(jié)果和所處的狀態(tài)機(jī)狀態(tài),計(jì)數(shù)器進(jìn)行計(jì)數(shù),計(jì)數(shù)結(jié)果作為延時(shí)鏈的譯碼地址,最后延時(shí)鏈經(jīng)過地址譯碼增加/減少一個(gè)延時(shí)單元,完成一次工作節(jié)拍調(diào)節(jié),繼而繼續(xù)進(jìn)行下一次調(diào)整,直到狀態(tài)機(jī)進(jìn)入鎖定狀態(tài)為止。SYN階段工作方式類似,但只對(duì)主延時(shí)鏈進(jìn)行調(diào)整。實(shí)現(xiàn)DLL鎖定,同步建立需滿足公式,如式(1)所示。
DSYN+SKEW=mult(P) (1)
式中,DSYN為主延時(shí)鏈可以提供的延時(shí);SKEW為時(shí)鐘偏斜;muh(P)為整數(shù)個(gè)輸入時(shí)鐘周期。
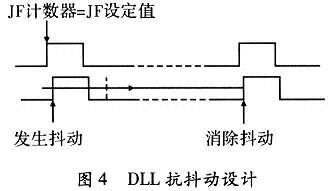
1.3 抗抖動(dòng)設(shè)計(jì)
如圖2所示,控制邏輯中JF counter1和JF counter2功能模塊。用戶可以設(shè)置抗抖動(dòng)數(shù)值d1,d2,如圖1所示,從而對(duì)這兩個(gè)模塊中的計(jì)數(shù)器設(shè)定一個(gè)計(jì)數(shù)周期。在DLL鎖定之后這兩個(gè)模塊開始工作,按照計(jì)數(shù)設(shè)定值的周期性對(duì)鎖定后的時(shí)鐘進(jìn)行檢測(cè)。即在計(jì)數(shù)器達(dá)到設(shè)定值時(shí),對(duì)鎖定后的反饋時(shí)鐘和輸入時(shí)鐘進(jìn)行鑒相,判斷相位關(guān)系,控制可逆計(jì)數(shù)器對(duì)鎖定后的時(shí)鐘進(jìn)行周期性微調(diào)干預(yù)。如圖4所示,在系統(tǒng)內(nèi)存在干擾時(shí),會(huì)產(chǎn)生時(shí)鐘抖動(dòng),若抗抖動(dòng)模塊工作檢測(cè)到反饋時(shí)鐘超前于輸入時(shí)鐘,則進(jìn)行一次微調(diào),消除抖動(dòng)的影響。抗抖動(dòng)設(shè)計(jì)有助于減少抖動(dòng)的影響。同時(shí)由于計(jì)數(shù)周期可設(shè),使得用戶可以在不同系統(tǒng)工作環(huán)境下,采用不同的抗抖動(dòng)設(shè)定值,以達(dá)到最優(yōu)的防抖效果。