1 引 言
當今,道路建設(shè)跟不上機動車輛的日益增多所帶來的負荷量,加之交通警力的缺乏,導(dǎo)致機動車輛事故頻發(fā)。一些輕微的刮蹭的發(fā)生卻常常導(dǎo)致主干道的大堵塞。自行解決非重大交通事故無疑成為了解決這一問題的理想途徑。基于SOPC技術(shù)的交通事故自動處理設(shè)備可置于每部機動車輛中,達到自動處理交通事故的目的,成本低,實用性、可擴展性強。
本設(shè)備設(shè)計目標:當機動車行駛途中遇到車禍,車主可首先通過該設(shè)備通過配備的GPS進行定位,通過設(shè)備上的GSM與交管部門取得聯(lián)系,通過設(shè)備上的攝像機記錄車禍現(xiàn)場和車牌號等相關(guān)信息,設(shè)備還可搭載基于SOPC上的無線電通訊設(shè)備實現(xiàn)與相關(guān)部門的語音通訊。
2 硬件組成
設(shè)計采用Altera公司的SOPC開發(fā)工具,系統(tǒng)的開發(fā)包括硬件和軟件兩大部分,使用SOPC Builder生成NIOS,NIOSⅡ嵌入式處理器。NIOS,NIOSⅡ嵌入式處理器開發(fā)工具允許用戶配置一個或多個NIOS,NIOSⅡCPU,從標準庫中添加外圍設(shè)備,綜合處理自定義系統(tǒng),與QuartusⅡ設(shè)計軟件一起編譯系統(tǒng)。硬件框圖如圖1所示。

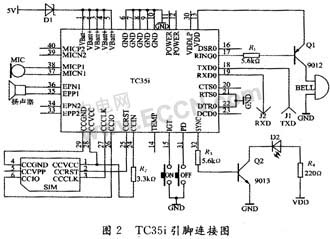
2.1 GPS與GSM部分
NIOS-1同鍵盤、LED和LCD顯示器、汽車中控系統(tǒng)以及GPS系統(tǒng)等外部設(shè)備的連接比較簡單,GSM系統(tǒng)的連接較為復(fù)雜,將在軟件部分加以說明。這部分的工作流程是:來自汽車中控系統(tǒng)和GPS系統(tǒng)的信息可以顯示在LED和LCD顯示器上,也可以通過GSM系統(tǒng)進行無線發(fā)送。用戶可以通過鍵盤對系統(tǒng)進行控制,交管部門也可以通過GSM系統(tǒng)對汽車中控系統(tǒng)進行遠程無線控制。
2.2 攝像頭部分
采用SCCB控制器控制攝像頭。系統(tǒng)中使用的攝像頭型號是Omni Vision公司的OV7649CAMERACHIPS芯片及其配套的CMOS鏡頭。這是一款低電壓的CMOS圖像傳感器芯片,通過其特有的SCCB(Serial Camera ControlBus)總線的控制,可以實現(xiàn)全幀、半幀、子采樣等各種形式的圖像輸出,輸出格式可選擇配制成YUV,RGB或者原始RGB等,另外可進行自動曝光控制,圖像增益控制等,而所有的配置都是通過SCCB總線進行更改。狀態(tài)機模型可簡化為6種狀態(tài):Idle空閑;Bit_Start比特開始;Bit_Mid_LOW比特傳輸中低位傳輸;Bit_Mid_HIGH比特傳輸中高位傳輸;Bit_End比特傳輸結(jié)束;Trans_End整個傳輸結(jié)束。根據(jù)具體的跳轉(zhuǎn)流程,用VHDL語言中的條件語句可以方便地完成,在此不再贅述。
TYPE states IS(Idle,Bit_Start,Bit_Mid_LOW,Bit_Mid_HIGH,Bit_End,Trans_End);SIGNAL now-State:states;下面對其中填充幀數(shù)據(jù)的過程進行描述:
在仿真過程中,由于要就很長一段時間的信號進行分析,所以限于篇幅,無法將仿真結(jié)果盡列于此。在工程實際使用中,SCCB總線控制模塊已經(jīng)被驗證無誤,能夠正確地實現(xiàn)攝像頭的配置,并且拍出的圖片質(zhì)量也達到了預(yù)期水平。
2.3 無線電通訊部分
這一部分是整個系統(tǒng)中最復(fù)雜也是占用資源最多的一部分。在此重點闡述。該部分同樣采用SOPC技術(shù)實現(xiàn)的無線電通訊功能可以比傳統(tǒng)的無線電系統(tǒng)減少成本。并且整合了整個系統(tǒng)使其都基于FPGA開發(fā)板上。這部分的功能實現(xiàn)如下:將語音編解碼程序移植到兩個NIOSⅡ(NIOSⅡ-1,NIOSⅡ-2)軟核處理器上實現(xiàn);利用PCIIP核在FPGA中增加了32 B的PCI Slave總線接口。利用NIOSⅡ-3處理器實現(xiàn)了系統(tǒng)參數(shù)的動態(tài)配置功能,并實現(xiàn)了原系統(tǒng)中通用控制器的控制管理功能;利用NIOSⅡ-4軟核處理器完成卷積碼編碼和維特比譯碼;在系統(tǒng)中加入了以太網(wǎng)IP核,配合外部以太網(wǎng)PHY接口芯片為電臺擴展了以太網(wǎng)接口,并增加了SDRAM控制器,為系統(tǒng)外擴了SDRAM存儲器,進一步增強了電臺的數(shù)據(jù)處理能力。在用戶邏輯中設(shè)計了可變長度的匹配濾波器,完成擴頻信號的解擴,數(shù)據(jù)的解調(diào)。
在該部分系統(tǒng)中,NIOSⅡ-1處理器用來實現(xiàn)實時的24 k。32 k速率∑-△語音編碼器,NIOSⅡ-2處理器用來實現(xiàn)∑-△語音的實時解碼器,這兩個處理器采用NIOSⅡPF高速型32位內(nèi)核;NIOSⅡ-3處理器采用標準型內(nèi)核,用來完成系統(tǒng)參數(shù)的配置、人機交互界面、電臺管理和控制以及系統(tǒng)中FLASH配置內(nèi)容的在線更新工作;系統(tǒng)增加的10/100 M以太網(wǎng)接口支持設(shè)備通過網(wǎng)絡(luò)遠程配置和管理,包括電臺使用偽碼的下發(fā)、電臺使用密鑰的下發(fā)、系統(tǒng)參數(shù)的遠程更新、新功能的重新配置等,為實現(xiàn)一定區(qū)域中所有工作電臺的空中管理提供了可能。通過在FPGA中增加NIOSⅡ-4處理器,用來實現(xiàn)信道編碼和譯碼,提高系統(tǒng)的誤碼率性能,以很小的代價方便地為電臺引入數(shù)傳功能。我們在使用(2,1,7)卷積碼配合維特比譯碼進行仿真,使用了一個NIOSⅡPF等級的處理器配合少量用戶邏輯,完成了不低于10 kb/s速率的卷積編碼和維特比譯碼工作。
3 軟件部分
在此著重介紹GPS/GS部分的系統(tǒng)軟件組成:系統(tǒng)軟件主要由主程序、GPS管理子程序和GSM管理子程序等部分組成。主程序完成系統(tǒng)的初始化,以及鍵盤、LED、LCD顯示器和汽車中控系統(tǒng)的操作管理等。GPS管理子程序主要負責從GPS系統(tǒng)接收時間和位置信息。請求GPS系統(tǒng)返回ASCII時間位置信息的二進制命令為:
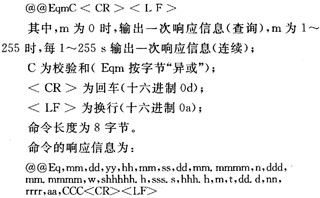
日期:mm是月(01~12),dd是日(01~31),yy是年(99~19)。
世界時間(UTC):hh是時(00~23),mm是分(00~59),ss是秒(00~59)。
緯度:dd是度(00~90),mm.mmmm是分(00~59.9999),n是方向(N是北,S是南)。
經(jīng)度:ddd是度(000~180),mm.mmmm是分(00~59.9999),w是方向(W是西,E是東)。
信息長度是96字節(jié)。
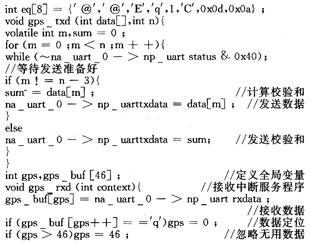
對應(yīng)的管理子程序為:
GSM管理子程序主要負責GSM系統(tǒng)的數(shù)據(jù)收發(fā)管理。GSM系統(tǒng)的數(shù)據(jù)收發(fā)以短信形式進行,選擇短信格式的AT命令為AT+CMGF,收發(fā)短信的AT命令分別為AT+CMGR和AT+CMGS,對應(yīng)的管理子程序為:
4 結(jié)語
本文設(shè)計一個應(yīng)用SOPC技術(shù)實現(xiàn)的交通事故自動處理設(shè)備,利用SOPC技術(shù)提高了交警對事故處理的速度,且傳送性能穩(wěn)定。實驗表明把SOPC技術(shù)引入交通部門的事故管理中,不僅能節(jié)省交通部門處理事故的費用,而且提高交警處理事故的效率,為交通部門提供精確、可靠的信息,具有很好的理論意義和實際價值。
