0 引 言
稀土永磁無(wú)刷直流電機(jī)采用高性能的稀土永磁材料和非接觸換相技術(shù),體積小,效率高,無(wú)電火花,工作可靠,同時(shí)又具有類似普通直流電動(dòng)機(jī)的調(diào)速性能,廣泛應(yīng)用于航空航天、精密儀器和工業(yè)控制自動(dòng)化等領(lǐng)域。無(wú)刷直流電機(jī)采用電子換相裝置,沒(méi)有機(jī)械電刷;采用永磁體轉(zhuǎn)子,沒(méi)有激磁損耗;發(fā)熱的電樞繞組置于外圍的定子上,散熱性好,效率高,過(guò)載能力強(qiáng),無(wú)換相火花,在高轉(zhuǎn)速領(lǐng)域尤為適合,是高速電機(jī)的一個(gè)重點(diǎn)發(fā)展方向。
目前,在一些特殊領(lǐng)域,對(duì)電機(jī)體積、連線數(shù)目以及可靠性等方面有著嚴(yán)格要求,在這些場(chǎng)合,無(wú)位置傳感器無(wú)刷直流電機(jī)(BLDCM)就成了理想的選擇。課題利用DSP,CPLD等數(shù)字化設(shè)計(jì)技術(shù)構(gòu)建了一個(gè)體積較小的高轉(zhuǎn)速、高可靠性電機(jī)轉(zhuǎn)速控制系統(tǒng)。系統(tǒng)采用兩相無(wú)刷直流電機(jī),以無(wú)位置傳感器方式,用電機(jī)繞組的反電勢(shì)作為信號(hào),由CPLD生成電機(jī)換相時(shí)序,通過(guò)硬件啟動(dòng)和鎖相環(huán)跟蹤,實(shí)現(xiàn)對(duì)無(wú)刷直流電機(jī)的穩(wěn)速控制。該系統(tǒng)具有結(jié)構(gòu)和電子控制線路簡(jiǎn)單、運(yùn)行可靠、維護(hù)方便等特點(diǎn)。
1 無(wú)刷直流電機(jī)的數(shù)學(xué)模型
以兩相導(dǎo)通、三相星形六狀態(tài)為例,無(wú)刷直流電機(jī)三相繞組的電壓平衡方程為:

式中:uA,uB,uC為定子相繞組電壓;eA,eB,eC為定子相繞組電動(dòng)勢(shì);iA,iB,iC為定子相繞組電流;L為定子每相繞組自感;M為定子每?jī)上嗬@組間的互感;R為三相定子電阻;p為微分算子。
由式(1)可以得到永磁無(wú)刷直流電動(dòng)機(jī)的等效電路模型,如圖l所示。

定子繞組產(chǎn)生的電磁轉(zhuǎn)矩表達(dá)式為:

永磁無(wú)刷直流電機(jī)轉(zhuǎn)子運(yùn)動(dòng)方程為:

式中:Tn為電磁轉(zhuǎn)矩;TL為負(fù)載轉(zhuǎn)矩;B為阻尼系數(shù);ω為電機(jī)機(jī)械轉(zhuǎn)速;J為轉(zhuǎn)動(dòng)慣量。
2 控制系統(tǒng)的控制策略和硬件組成
2.1 控制系統(tǒng)的控制策略
系統(tǒng)采用轉(zhuǎn)速、電流雙閉環(huán)控制,用數(shù)字器件構(gòu)成速度控制部分,電流環(huán)采用傳統(tǒng)的PI調(diào)節(jié)器。DSP作為中央控制器,發(fā)出各種指令,并構(gòu)成速度回路的PI調(diào)節(jié)器,可以進(jìn)行智能PID控制; CPLD一部分構(gòu)成鎖相環(huán)用以檢測(cè)輸入頻率與反饋頻率的誤差值,另一部分利用電樞反電勢(shì)產(chǎn)生逆變器的換相控制信號(hào)。系統(tǒng)的控制原理框圖如圖2所示。

2.2 控制系統(tǒng)的硬件組成
無(wú)刷直流電機(jī)控制系統(tǒng)的硬件連接框圖如圖3所示,主要由無(wú)刷直流電機(jī)、逆變器、控制器和電源等組成。

由于電機(jī)的轉(zhuǎn)速較高,達(dá)到19 500 r/min,所以采用運(yùn)算速度較快的大規(guī)模可編程邏輯器件(CPLD)進(jìn)行速度反饋和電機(jī)換相信號(hào)的處理,TMS320F2812(DSP)構(gòu)成速度控制器。電機(jī)的速度反饋量經(jīng)CPLD的內(nèi)置鎖相環(huán)74LS297處理,產(chǎn)生偏差量輸入DSP進(jìn)行速度回路校正,經(jīng)4通道、12位分辨率的D/A轉(zhuǎn)換器 DAC7724輸給電流控制器,經(jīng)電流校正后進(jìn)入逆變器,EPM7128S(CPLD)接收電機(jī)繞組的反電勢(shì)產(chǎn)生控制4組功放開(kāi)關(guān)的導(dǎo)通信號(hào)。電機(jī)有A, B兩個(gè)繞組,兩個(gè)繞組依次正、反導(dǎo)通,按照A-B-A-B的順序連續(xù)給定子繞組通電,則轉(zhuǎn)子就以一定的轉(zhuǎn)速順時(shí)針旋轉(zhuǎn)。
控制系統(tǒng)的DSP核心控制部分的硬件電路連接圖如圖4所示。

3 軟件設(shè)計(jì)
系統(tǒng)軟件由DSP程序和CPLD程序兩部分組成。進(jìn)行軟件設(shè)計(jì)時(shí),先進(jìn)行系統(tǒng)分析,將整個(gè)程序按功能需求劃分子模塊。考慮到控制系統(tǒng)的實(shí)時(shí)性要求,采用中斷方式編程,整個(gè)DSP軟件系統(tǒng)由一個(gè)主程序和若干中斷服務(wù)程序組成。
主程序的作用主要是對(duì)系統(tǒng)進(jìn)行初始化,包括對(duì)DSP本身寄存器、中斷、定時(shí)器、GPIO等進(jìn)行初始化。初始化DSP,使其內(nèi)部產(chǎn)生工作時(shí)鐘;初始化DSP 內(nèi)部模塊;禁止全局中斷,初始化中斷向量表,根據(jù)需要對(duì)中斷進(jìn)行設(shè)置;打開(kāi)全局中斷,進(jìn)入循環(huán)等待主程序,等待內(nèi)部和外部中斷信號(hào)。中斷子程序完成轉(zhuǎn)速環(huán)的校正控制任務(wù)。DSP中斷子程序的流程圖如圖5所示。

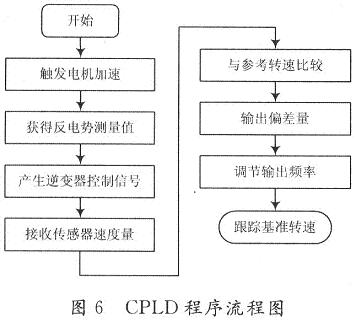
CPLD部分完成電機(jī)的換相處理和速度反饋控制功能,采用圖形化設(shè)計(jì)和VHDL語(yǔ)言混合設(shè)計(jì)完成時(shí)序部分的編寫。CPLD接收電機(jī)繞組反電勢(shì),經(jīng)片內(nèi)邏輯電路處理,形成4路逆變器的導(dǎo)通控制信號(hào),用以控制電機(jī)繞組的加電順序;通過(guò)CPLD內(nèi)置的數(shù)字鎖相環(huán)74LS297進(jìn)行鎖相處理,完成對(duì)電機(jī)轉(zhuǎn)速的恒定控制。利用CPLD將鎖相環(huán)和換相處理電路封裝在一起,形成一個(gè)完整的速度反饋控制模塊。CPLD部分程序流程圖如圖6所示。