
1 概述
簡單系統(tǒng)可直接建立模型,并分析模塊之間的相互關系以及模塊輸入輸出關系。但對相對復雜的系統(tǒng),Simulink包含多個模塊,使得各個模塊之間的相互關系非常復雜,不利于分析。為此,可將具有一定功能的模塊群進行封裝,用戶不必了解其內(nèi)部結構,只需了解其功能和輸入?yún)?shù)即可。而且每個模塊可移植。仿真實驗平臺封裝的主要模塊包括:典型的單相整流器主電路,三相全控橋整流器主電路,檢測模塊(坐標變換),脈沖產(chǎn)生模塊,控制模塊,測量模塊等。通過仿真得到三相可逆PWM整流器的主電路電感值、開關頻率等參數(shù),并影響到輸入電流總諧波失真(THD)、電源功率因數(shù)以及系統(tǒng)輸出直流電壓,從而為實際設計確定主電路的參數(shù)提供可靠依據(jù),對三相可逆PWM整流器設計具有實際意義。
2 模塊庫的建立
仿真平臺的建立是通過在Simulink Library Browser下面創(chuàng)建一個自己的模塊庫實現(xiàn),新建庫名為kongde。用右鍵打開模塊庫,并將自己封裝的模塊添加到庫中。添加完所有模塊并保存之后,點擊Simulink Library Browser下面的kongcle,便顯示了該模塊庫中的所有模塊,如圖1所示。仿真時,只需將各個功能模塊從模塊庫中添加到模型文件中,設置相應的參數(shù),并把各個功能模塊按照原理連接即可觀察結果。

3 模塊封裝
3.1 整流器主電路
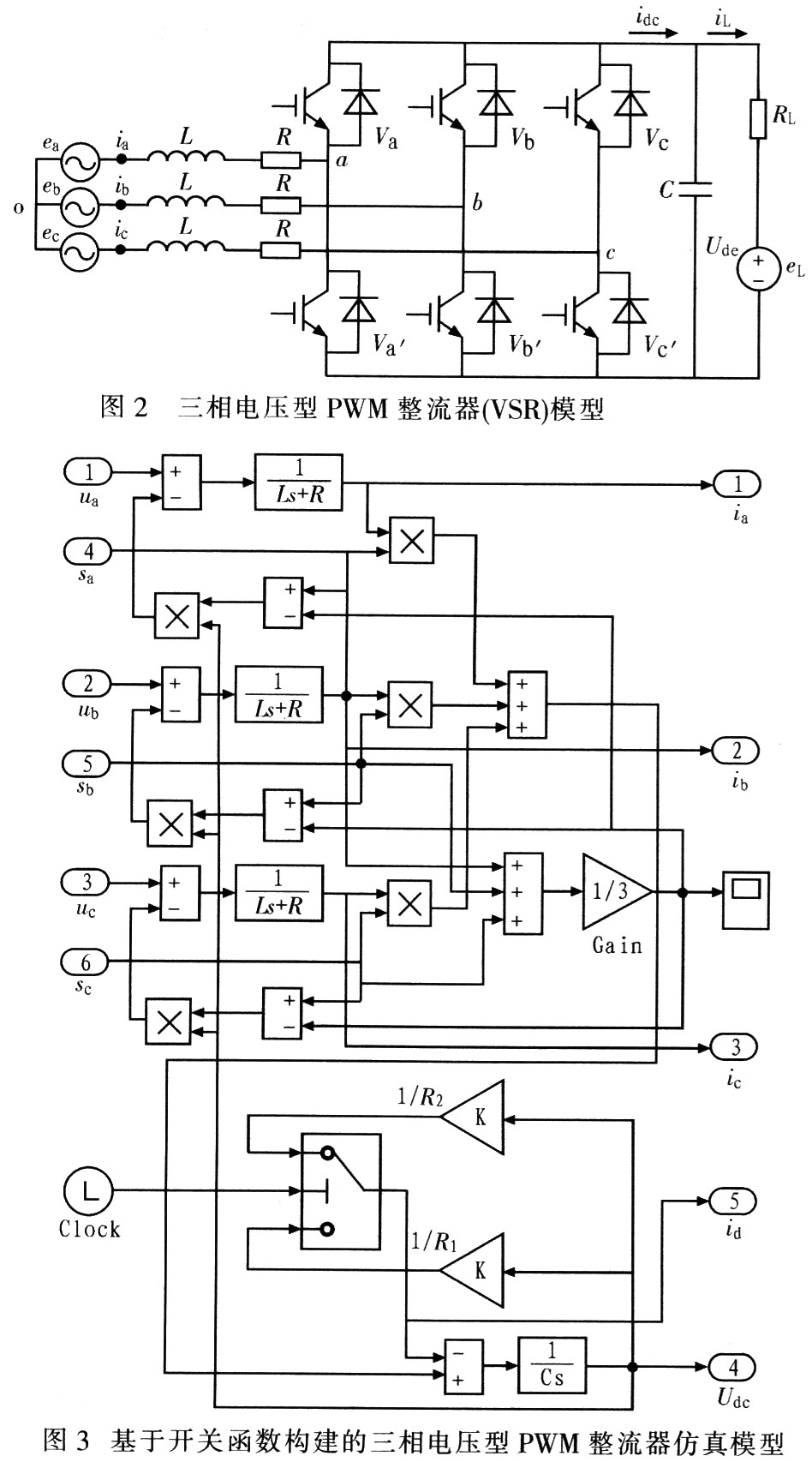
所建的整流器主電路采用阻感負載。三相電壓型PWM整流器主電路如圖2所示。對于Simulink依據(jù)整流器的數(shù)學模型,采用開關函數(shù)微分方程組搭建模型,仿真運算速度較快。由于模塊庫對諸如IGBT的緩沖電路參數(shù),開關延時等參數(shù)有細致建模,故而更接近真實情況,如圖3所示。
3.2 控制模塊
仿真時所用的控制模塊是基于空間電壓矢量的電流解耦控制算法,電流解耦控制模塊如圖4所示。

3.3 功率因數(shù)測量模塊
因數(shù)測量包括功率因數(shù)、基波位移因數(shù)、畸變因數(shù)、以及有功功率、無功功率、視在功率等。對于三相系統(tǒng),如果三相電壓電流波形對稱,則有功功率為三相有功之和,無功功率為三相無功之和,如圖5所示。此模塊可測量三相系統(tǒng)功率因數(shù),以及有功、無功、視在功率等。
4 基于仿真模塊的三相VSR系統(tǒng)的仿真
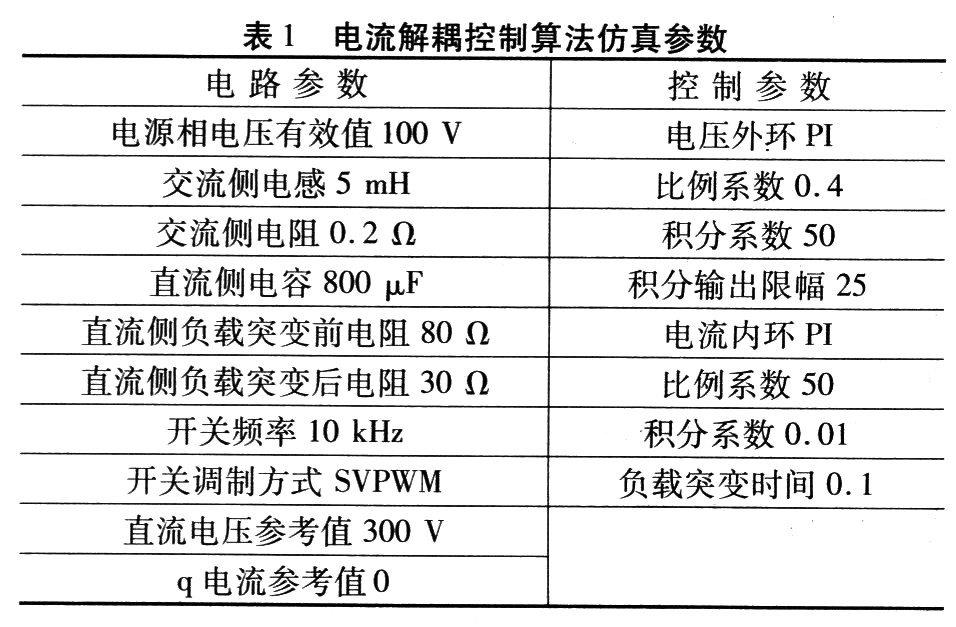
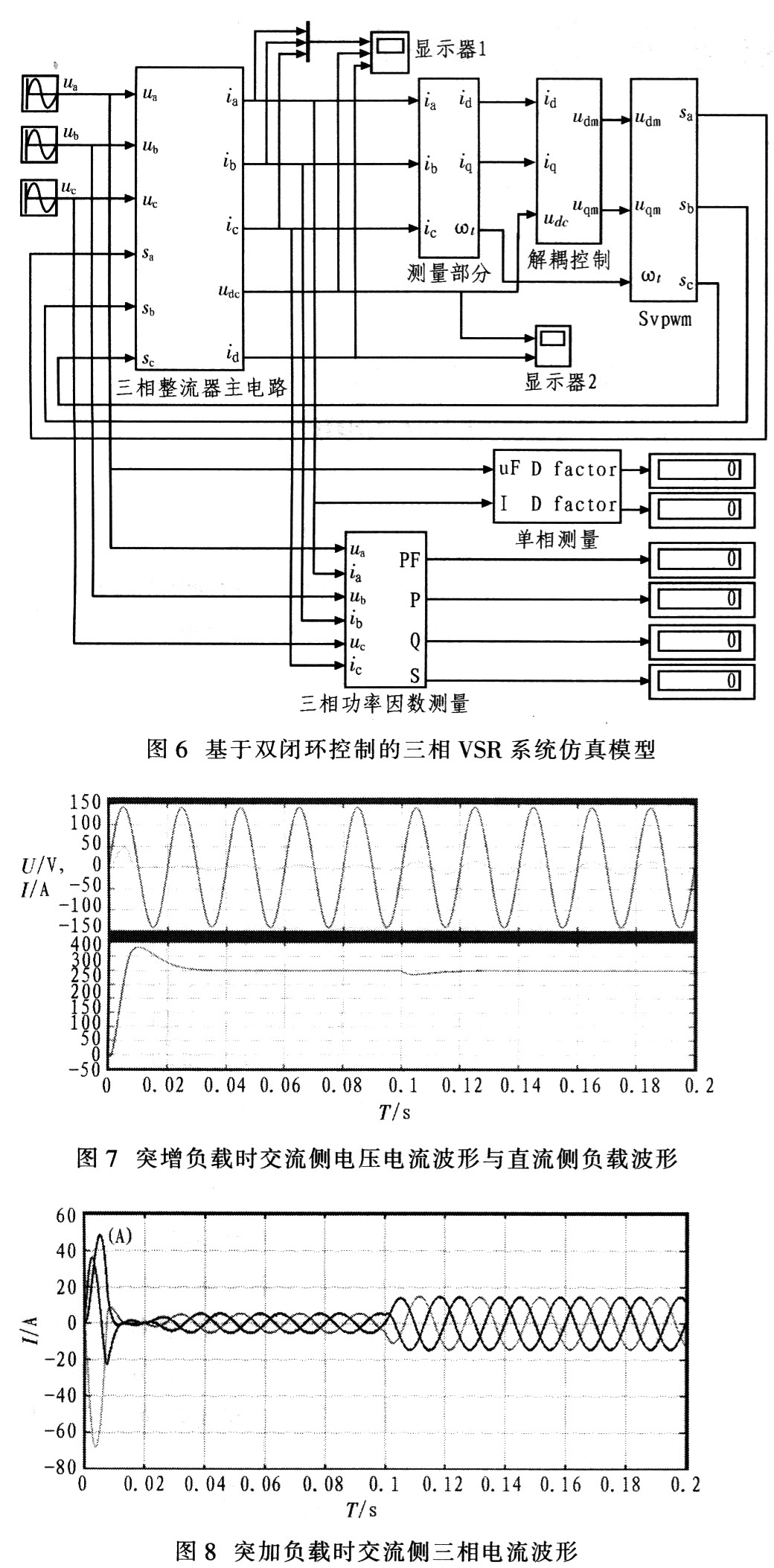
整個系統(tǒng)是由一個電壓環(huán)和2個電流環(huán)組成的雙內(nèi)環(huán)單外環(huán)的雙環(huán)控制結構,電壓環(huán)不僅控制直流輸出電壓,并將電壓環(huán)調(diào)節(jié)器的輸出作為有功電流id的給定,無功電流iq的給定可以直接設為零。在電流電壓雙環(huán)系統(tǒng)中,作為內(nèi)環(huán)的電流環(huán)直接決定著整個系統(tǒng)動靜態(tài)特性的優(yōu)劣。整個系統(tǒng)的仿真模型如圖6所示,該系統(tǒng)包括主電路模塊、檢測模塊、電流解耦控制模塊、SVPWM模塊以及測量模塊。該模型中的主要模塊均從kongde模塊庫中添加,按照功能連接好相應模塊即可仿真。設置系統(tǒng)參數(shù),具體參數(shù)如表l所示。
設置好參數(shù)后可對系統(tǒng)仿真。突增負載時交流側電壓、電流波形與直流側負載波形如圖7所示;突增負載時交流側三相電流波形如圖8所示;突減負載時交流側電壓電流波形與直流側負載波形如圖9所示;突減負載時交流側三相電流波形如圖10所示。
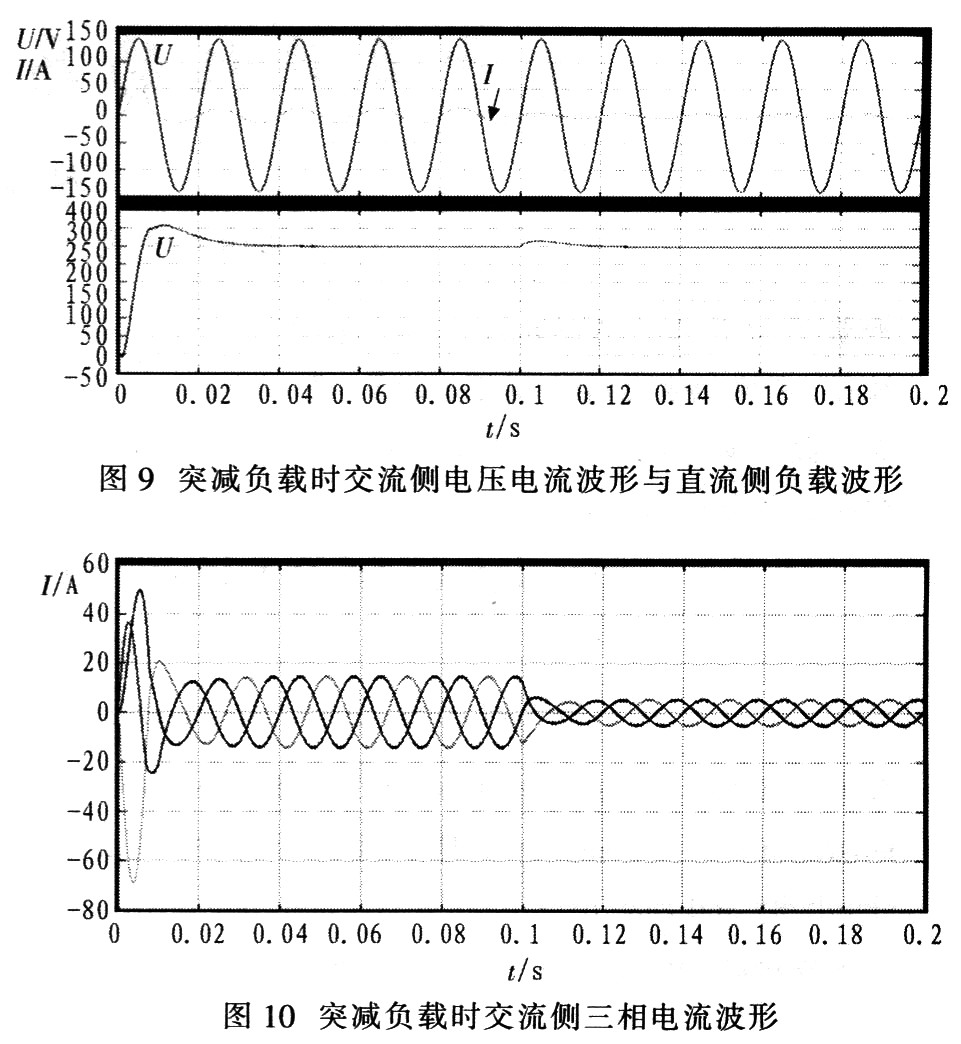
通過仿真結果可以看出:基于空間電壓矢量的電流解耦控制算法,使三相VSR在穩(wěn)態(tài)時交流側電流波形對稱且為正弦,相電流與相電壓同相位,且直流側電壓穩(wěn)定,負載突變時,電壓有一定波動,但很快在一個周波內(nèi)跟上給定值,可見系統(tǒng)具有較強的魯棒性。通過測量可知,三相系統(tǒng)的功率因數(shù)近似為1,并測量其中一相的電壓、電流,測得基波位移因數(shù)以及畸變因數(shù)均近似為l。在暫態(tài)過程中,電流具有快速的跟隨性能,系統(tǒng)暫態(tài)過渡時間短。在負載突變發(fā)生時,都能保持正弦電流波形,并且保持高功率因數(shù)運行。三相VSR的基于空間電壓矢量的電流解耦控制,直流側電壓更穩(wěn)定,紋波更小,功率因數(shù)較高。同時三相VSR亦可運行在單位功率因數(shù)逆變狀態(tài)。
5 結語
所建立的仿真平臺可提供一個更深入學習基本理論的機會,而不是僅限于書本知識,在仿真過程中。必然會碰到各種問題,通過改變各種參數(shù)來分析波形,從而分析參數(shù)對整個仿真系統(tǒng)的影響。仿真平臺有一定局限性,只對幾種常見的整流器進行封裝,同時有些參數(shù)固定,比如PWM周期(0.02 s),若要改變周期,同時也得改變電源周期,這些還有待改進。