
摘? 要: 介紹了五點式全自動捆鈔機的原理與實現(xiàn),并給出了相應的硬件結(jié)構(gòu)框圖和部分軟件框圖以及各種非正常情況的處理方法,。
關(guān)鍵詞: 五點式? 全自動? 捆鈔機? 可靠性
?
捆鈔機是金融系統(tǒng)中的辦公用品,其功能是將現(xiàn)鈔打把(每百張紙幣為一把)、打捆(每十把為一捆),以便進行現(xiàn)鈔的清點、運輸和保存,。國內(nèi)的捆鈔機主要分為三類,。第一類是機械式的,即通過杠桿,、螺旋或液壓機械按壓后由手工捆扎,因此工作人員勞動強度較大,且操作不規(guī)范,。第二類是半自動的,即用電腦控制實現(xiàn)其中連續(xù)的一個或兩個動作,然后在工作人員配合下完成捆鈔。第三類捆鈔機是全自動的,由工作人員把捆扎的現(xiàn)金放在工作臺上,按下自動捆扎鍵后,自動捆鈔機將完成全部動作,。采用全自動方式可以真正地把操作人員從重復的勞動中解放出來,同時大大提高效率,。目前金融部門用的捆鈔機大部分是三點式的半自動捆鈔機,由于三點式捆鈔機會引起現(xiàn)鈔的丟張現(xiàn)象,因此金融部門要求捆鈔機能實現(xiàn)現(xiàn)金的五點捆扎?;谝陨显?開發(fā)了五點式的全自動捆鈔機,在實際應用中達到了良好的效果,。
1 五點式全自動捆抄機的工作原理
五點式全自動捆鈔機連續(xù)捆鈔的動作可以分為兩步:第一步把現(xiàn)鈔進行橫向捆扎,第二步將現(xiàn)鈔進行兩次縱向捆扎。具體實現(xiàn)過程如下:
(1)將現(xiàn)鈔放在工作臺上,按下自動捆扎鍵,壓幣電機開始動作,將現(xiàn)鈔壓緊,。當檢測到現(xiàn)鈔被壓緊時,壓幣電機停止工作,。
(2)啟動進帶電機,進帶機構(gòu)開始進帶,當帶頭碰到帶道上的“進帶到位”行程開關(guān)時,進帶電機停止工作。同時,凸輪電機開始動作,將帶頭壓住,。壓好帶頭后,凸輪電機停止轉(zhuǎn)動,。
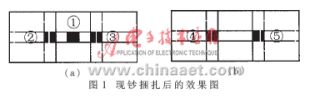
(3)進帶電機反轉(zhuǎn)緊帶,將帶抽緊,當檢測到帶被抽緊時,進帶電機停止工作。同時,凸輪電機開始工作,帶動焊接頭將帶焊接好,焊完后凸輪電機又帶動切刀將帶切斷,當檢測到凸輪電機達到初始位置時,凸輪電機停止工作,。焊接點如圖1(a)中①所示,。
?
(4)壓幣電機反轉(zhuǎn),當工作臺下降到一定程度時,壓幣電機停止轉(zhuǎn)動,。同時,機械手電機帶動機械手左轉(zhuǎn)。當檢測到現(xiàn)鈔已被放置成縱向時,機械手電機停止工作,。
(5)壓幣電機壓幣,然后進行進帶、壓帶,、緊帶,凸輪電機和下焊點" title="焊點">焊點電機同時動作,將上下焊點進行焊接,。最后進行切帶,完成第一個縱向的捆扎。上焊接點如圖1(a)中②所示,下焊接點如圖1(b)中④所示,。
(6)機械手將現(xiàn)鈔旋轉(zhuǎn)180度后,進行第二次縱向捆扎,第二次捆扎后的上焊點如圖1(a)中③所示,下焊接點如圖1(b)中⑤所示,。
圖1(a)為焊接完后的現(xiàn)鈔正面效果,圖1(b)為焊接完后現(xiàn)鈔的反面效果圖,黑點表示焊接點。
橫向捆扎過程可用圖2來表示,。其中,灰色部分為現(xiàn)鈔,細線為捆扎帶,。
?

全自動捆鈔機的硬件控制電路主要包括顯示部分、鍵盤部分,、電機驅(qū)動部分及各個電機的位置檢測四大部分,。其硬件框圖如圖3所示。
?
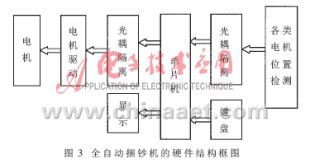
電機的位置檢測包括:錢幣種類(5元,、50元,、100元等錢幣的尺寸不一)位置檢測;機械手位置檢測;壓幣電機位置檢測;下焊點位置檢測;凸輪電機位置檢測;進帶電機位置檢測等。
電機包括:幣種位置電機,、機械手驅(qū)動電機" title="驅(qū)動電機">驅(qū)動電機,、壓幣電機、下焊點驅(qū)動電機,、凸輪電機,、進帶電機等。
電機控制部分的電路如圖4所示,。
?
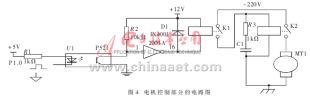
當P1.0為高電平時,U1截止,K1閉合,進而K2閉合,電機轉(zhuǎn)動,。而當P1.0為低電平時,電機失電停轉(zhuǎn)。
在圖4的電路中采取以下幾點措施來增強抗干擾功能:
(1)控制回路和驅(qū)動部分不共地,控制回路采用信號地,驅(qū)動部分采用模擬地,應用光電耦合器進行隔離,。而對于交流部分 采用的是交流地,并且把交流部分放在控制板外部,。
(2)在直流繼電器K1的線圈兩端并一個二極管,在交流繼電器K2的線圈兩端并一個阻容吸收回路,用來吸收線圈通斷電時產(chǎn)生的很高的反電勢,從而減小對單片機系統(tǒng)" title="單片機系統(tǒng)">單片機系統(tǒng)的干擾。
2 自動捆鈔機的軟件實現(xiàn)
由于捆鈔機的工序是順序控制,因此對于實現(xiàn)捆鈔機動作的子程序可以獨立編制,然后根據(jù)工藝要求將各個部分串接起來,。由于各個模塊的功能主要是對對應的位置進行精確定位,實現(xiàn)方法" title="實現(xiàn)方法">實現(xiàn)方法基本相同,因此本文只畫出進帶電機進帶的軟件框圖,如圖5所示,。
?
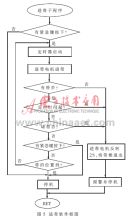
對于一個系統(tǒng)來說,除了要實現(xiàn)正常的功能外,還要能檢測整個電路的工作情況是否正常。因此在軟件的開始部分是檢測設(shè)備能否正常工作,。若機械部分不是在復位狀態(tài),則要驅(qū)動相應的電機使捆鈔機復位,。在運行過程中要能檢測出各種非正常情況。下面列舉幾種非正常情況的處理方法,。
(1)軟件首先應該檢測出各個位置檢測傳感器是否正常,。若作為位置檢測的傳感器開路或斷路,在單位時間內(nèi)無信號接收到,則停機并開始報警,從而提高了設(shè)備的可靠性,。
(2)捆鈔機檢測到帶梢時,表示一盤帶子將用盡。這時自動把機器中的帶梢退出,然后報警,告訴用戶帶已用完,需要重新安裝一盤新的帶子,。
(3)進帶時,若由于帶子的缺陷使其卡在捆鈔機中,捆鈔機能檢測到帶子是有缺陷的,。
作為金融器具,安全性也是一個重要指標。因此要求捆鈔機能處理一些特殊的情況,如當壓幣電機剛開始松幣時,壓幣電機的傳感器突然發(fā)生故障,。若按正常處理各種異常情況的方法,則壓幣電機停機并報警,。此時現(xiàn)金將被壓在設(shè)備中,等維修人員到現(xiàn)場處理,這可能有一兩天時間。但是把現(xiàn)金放在外部是金融部門不允許的,。本捆鈔機處理該異常情況的方法是按住某一按鍵數(shù)秒鐘后,壓幣電機即松幣,直到該鍵放開,。
另外在設(shè)計捆鈔機時,對于每一個單獨的動作,都可以通過面板上對應的按鍵來完成。通過這種設(shè)計,使捆鈔機的維修變得簡單,。
3 提高電機控制精度的實現(xiàn)方法
由于單相異步機的價格很低,因此在本系統(tǒng)中全部采用單相異步電機,。但從位置控制的角度講,單相異步機很難精確定位(開環(huán)控制)。單相異步電機快速停車的實現(xiàn)原理如下:當異步電機在正常工作狀態(tài)下時,異步電機兩相繞組上的相位相差90°,因而在異步電機定子上產(chǎn)生一個旋轉(zhuǎn)磁場,。在旋轉(zhuǎn)磁場中的轉(zhuǎn)子切割磁力線而使電機旋轉(zhuǎn),。當在電機的兩相繞組上同時加同相電壓時,則在定子中產(chǎn)生一個靜止的磁勢,而此時電機的轉(zhuǎn)子由于電流的存在也產(chǎn)生一個磁勢。該磁勢隨轉(zhuǎn)子旋轉(zhuǎn),。根據(jù)磁路最近原理可知,當兩個磁勢產(chǎn)生的磁路最短時,磁路達到穩(wěn)定,。因而當電機定子的磁勢和轉(zhuǎn)子的磁勢重合時,磁路達到最短。這樣就使電機在最短的時間內(nèi)停止工作,。其原理即電磁剎車的原理,。硬件中沒有增加剎車部分,但其系統(tǒng)的性能卻得到很大的提高。使用該方法不但減少成本,而且增加了整個系統(tǒng)的可靠性,。
4 機械手功能的實現(xiàn)
由于在捆鈔機中,機械手需要完成的動作很簡單,只是把現(xiàn)鈔從橫向放置成縱向,然后再將現(xiàn)鈔從縱向放置成橫向,各個動作之間是90度關(guān)系,因此機械手動作可以通過電機帶動機械手的凸輪結(jié)構(gòu)來完成,。當檢測部分檢測到凸輪機構(gòu)完成90度旋轉(zhuǎn)后,電機停轉(zhuǎn),完成捆鈔機機械手部分的動作。
五點式智能捆鈔機從硬件和軟件上采取了各種抗干擾措施,使該設(shè)備抗干擾能力增強,工作穩(wěn)定性提高,同時具備多種自診斷功能,如出現(xiàn)各種意外情況,也不會損壞現(xiàn)金,。該設(shè)備在實際工作中性能可靠,是一款理想的金融器具,。
?
參考文獻
1 袁貴棟. DK-1型電腦自動捆鈔機抽帶張緊結(jié)構(gòu)的改進.河北工業(yè)科技,1999?鴉16(1)
2 徐愛鈞.單片機高級語言C51 WINDOWS環(huán)境編程與應用.北京:電子工業(yè)出版社,2001
3王辛之.單片機應用系統(tǒng)抗干擾技術(shù).北京:北京航空航天大學出版社" title="北京航空航天大學出版社">北京航空航天大學出版社,1999
4 高 鋒.單片微型計算機原理與接口技術(shù).北京:科學出版社,2003