
電磁干擾在工業(yè)控制中越來越成為一個(gè)嚴(yán)重的問題。在使用TMS320C24X DSP控制器來控制數(shù)字電機(jī)的應(yīng)用中,如何減少電磁干擾也是一個(gè)重要的問題。在電機(jī)控制中,一方面,要在電路設(shè)計(jì)上盡量減少電磁干擾的產(chǎn)生,另一方面,因?yàn)樽畲蟮碾娏髟?a class="innerlink" href="http://forexkbc.com/tags/PWM" title="PWM" target="_blank">PWM控制H橋(優(yōu)化的PWM的開關(guān)模式)中是具有代表性的,同樣的空間矢量PWM之和或者不穩(wěn)定的PWM載波信號能更進(jìn)一步的減少電磁干擾,我們可采用最適宜的PWM模式,使用軟件代碼技術(shù)來減少電磁干擾。下面我們就從硬件和軟件兩方面來分析說明電磁干擾的產(chǎn)生及減少電磁干擾的措施。
電路設(shè)計(jì)時(shí)電磁干擾的產(chǎn)生及措施
在電磁電路中的電磁兼容性很大范圍是由線路貯藏和互相連接的成分決定的。有從天線返回的相應(yīng)信號列是能放射出電磁能量的,其最主要是由于電流幅值,頻率和電流線圈的幾何面積決定的。通常,有三個(gè)主要的電磁干擾來源:電源、高頻信號、振蕩器電路。下面我們分別分析產(chǎn)生原因及其防范措施。
電源
當(dāng)一CMOS反向換流器在改變輸出狀態(tài)時(shí),兩晶閘管會有一段很短的時(shí)間同時(shí)導(dǎo)通。這會使電流增長很快,導(dǎo)致在電源線路上出現(xiàn)電流尖峰。這引起一段或長或短的電源線路的短路,這被證實(shí)是產(chǎn)生電磁干擾的一個(gè)重要原因。 減弱電源電壓的波動,使其接近一100nF瓷旁路電容器的供應(yīng),是十分有效的。然而,由于電路的寄生成分,例如集成和電源線路的阻抗,旁路電容器是不能有效減少電流峰值的,因此也不能減少輻射干擾。為了抑制這些電流尖峰(至少在電源線路上)使其不擴(kuò)展到其他部位,我們用一個(gè)方法可以做到,就是在極間耦合電容器和電源線路之間增加一個(gè)感應(yīng)線圈LH,如圖1所示。LH應(yīng)接近TMS320F24X DSP芯片,以方便干擾被抑制。
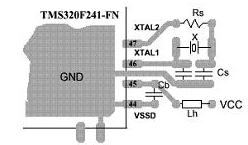
圖1.TMS320F241-FN單層電路印刷版
信號回路
高頻信號回路,例如較低地址線,時(shí)鐘信號,串行口等等,通常由幾并聯(lián)的100K和10K的負(fù)載,來產(chǎn)生一CMOS的信號輸出,帶或者不帶這負(fù)載會產(chǎn)生一個(gè)很高的電流峰值。
我們可有兩種方法來減少這方面造成的電磁干擾,第一種是盡可能的減少這些電流,方法是在輸出接一個(gè)大約為50Ω的電阻。傳輸線原理表明這個(gè)電阻(內(nèi)部+外部電阻)只要小于或者等于一般的線路阻抗值70-120Ω的話,這對速率是沒有什么負(fù)面影響的。第二個(gè)防范措施是使天線盡可能的小,最有效的方法是僅僅保持臨界線路(優(yōu)先時(shí)鐘回路,低地址回路,其他數(shù)據(jù)回路)盡可能的短。TMS320C24x的CPU時(shí)鐘倘若復(fù)位后由CLKOUT1提供,在不使用時(shí)最好切斷它。當(dāng)外存儲器不用時(shí),可以通過拉高或拉低數(shù)據(jù)線來避免由于懸空輸入端而引起的任何電流。
振蕩器
在數(shù)字系統(tǒng)中最高的連續(xù)頻率通常是由時(shí)鐘發(fā)生器產(chǎn)生的,在C24x DSP的內(nèi)部振蕩器中使用一晶體,這有助于減少高頻電流,同時(shí)被電流通路圍住的面積會減少電磁干擾。由于晶體在共振頻率上的幾百KΩ的高阻抗,電流在引起晶體共振的頻率上是很小的。然而CMOS反向換流器的輸出電壓是一個(gè)包含諧波的方波信號,所以晶體不再表示為一個(gè)高阻抗,這會引起很大的電流。 解決辦法是加上一個(gè)串聯(lián)電阻使這些電流成分減少。
兩個(gè)旁路電容器會在振蕩頻率時(shí)產(chǎn)生一個(gè)很小的電阻,因此會存在一個(gè)重要的電流回路Cs-X-Cs。為了使輻射最小,這面積要盡可能的小。圖1提供了一個(gè)外部晶體與TMS320F241 DSP相連的方案。串聯(lián)電阻的大小為1K,晶體的并聯(lián)電阻可以根據(jù)要求來接入。
優(yōu)化PWM模式,減少電磁干擾
當(dāng)印刷電路板完成后,TMS320C24x DSP的PWM單元可以用來提供一個(gè)優(yōu)化的開關(guān)模式,來進(jìn)一步減少電磁干擾的產(chǎn)生。接著考慮的是制作一個(gè)由DSP來驅(qū)動的3相H橋。
PWM模式
在電機(jī)控制領(lǐng)域中,我們常用三個(gè)典型的PWM模式(不對稱PWM,對稱和空間矢量PWM),三個(gè)典型的PWM模式在電磁干擾方面會有不同的影響。
對不對稱PWM來說,3相H橋的三個(gè)開關(guān)是同時(shí)被打開,且根據(jù)占空比來關(guān)閉。對稱PWM的打開和關(guān)閉與PWM的半個(gè)周期是有對稱關(guān)系的,因此三相交換幾乎不發(fā)生在同一時(shí)間。這種方式來減少電磁干擾是與dU/dt和dI/dt有關(guān)的,這與不對稱PWM相比有66%的近似。在使用正弦波時(shí),兩種模式最小的H橋連接電壓UDC具有有效的電機(jī)電壓功能,其數(shù)值可根據(jù)下式求出:
![]()
空間矢量PWM也是與PWM周期對稱相關(guān)的,但是,既然只有兩個(gè)晶體管在一PWM周期被切斷,則電磁干擾輻射與對稱PWM相比減少了30%。第二個(gè)優(yōu)點(diǎn)是最小連接電壓UDC比正弦對稱PWM的大約降低15%,其數(shù)值可根據(jù)下式求出:
![]()
也因此du/dt也能進(jìn)一步被減少。
下表列出了不對稱、對稱和空間矢量 PWM 的性能比較

上面我們分析了產(chǎn)生電磁干擾最小的PWM模式,下面我們闡述采用最適宜的PWM模式,使用軟件代碼技術(shù)來減少電磁干擾。對于TMS320F240的PWM單元來說,C語言是一典型的代碼工具。所有相關(guān)的PWM寄存器在定時(shí)器1溢出時(shí)被屏蔽和重置,我們選用空間矢量PWM或者對稱PWM模式。
下面我們列出空間矢量PWM/對稱PWM初始化的編碼:
#define SPACE_VECTOR_PWM
T1CON=OX2840; /*50ns周期內(nèi)脈沖數(shù)*/
T1PR =PWM_PERIOD; /*PWM載波頻率*/
/*FPWM=50ns*2* PWM_PERIOD*/
# ifdef SPACE_VECTOR_PWM; /*空間矢量PWM*/
COMCON=0X1207; /*Timer1=0時(shí)重置CMPRX,T1PR,ACTR使能PWM1-6輸出*/
#else
COMCON=0X0207; /*對稱PWM*/
#endif
ACTR=0X0666; /*1,3,5路PWM高;2,4,6路PWM底*/
DBTCON=0X14E0; /*死區(qū)時(shí)間=1 us*/
COMCON=0X8000; /*使能比較單元*/
搖擺的PWM載波
當(dāng)電磁干擾與連續(xù)的PWM載波頻率相聯(lián)系,且其諧波太高時(shí),我們可以通過對這個(gè)頻率的調(diào)制來降低電磁干擾。調(diào)制方法比如三角信號,任意的噪音等,我們可用示波器看出其波形。
圖2表明一固定的載波信號為20KHZ的PWM頻譜和輸出脈沖電壓,載波信號振幅的峰值和其諧波為36db,高于基底噪音。圖3示范了搖擺的載波信號(20KHZ+/-2KHZ),使用一隨意的噪音(一個(gè)任意噪音的產(chǎn)生僅需要6個(gè)時(shí)鐘周期)來產(chǎn)生一擴(kuò)展頻譜的結(jié)果,與一固定的載波信號相比,電磁干擾被減少了12DB。進(jìn)一步減少18DB可用+/-4KHZ的調(diào)制來完成。
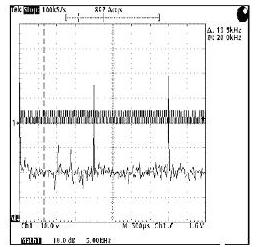
圖2.固定20KHZPWM載波信號的FFT
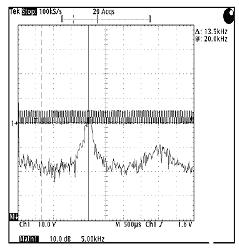
圖3.具有+/-2KHZ的隨意噪音調(diào)制信號的20KHZ PWM載波信號的FFT
在許多應(yīng)用程序中輸出電壓是分?jǐn)?shù)(Q15)換算到最大的正/負(fù)輸出電壓,一三相輸出的PWM,是相電壓U(a),U(b),U(c)在一正弦PWM或者是空間矢量PWM電壓情況下,由2個(gè)差60度正分?jǐn)?shù)矢量U(x),U(X+60)和矢量旋轉(zhuǎn)方向來表現(xiàn)的。在逆時(shí)針旋轉(zhuǎn)情況下由U(x)來決定的,在順時(shí)針旋轉(zhuǎn)情況下由U(x+60)來決定的。兩個(gè)PWM模式的分電壓u(a),U(b),U(c)或U(x),U(x+60)須相乘,以此得到相應(yīng)的PWM占空比。因此,在更新PWM的比較值時(shí),搖擺PWM時(shí)期不要增加任何系統(tǒng)操作!
在下面的例子中顯示了C語言怎么在中斷服務(wù)子程序中以+/-10%PWM的載波調(diào)制用于當(dāng)前的中斷控制。
PWM載波信號的編碼列表:
/* Wobble PWM (Timer 1) period by±10% */
pwm_period = PWM_PERIOD + wobble_random(PWM_PRIOD/10);
/* Update Space Vector PWM */
SV_PWM_Update(pwm_period,u_x,u_x60,sector,direction);
Wobble random(),SV-PWM-Update()在匯編時(shí)被寫入,使其運(yùn)行時(shí)間最小,并提供C兼容接口,允許能從C調(diào)用,使程序具有更好的可讀性。
結(jié)束語
本文所闡述的在用DSP控制電機(jī)的應(yīng)用中減少電磁干擾的硬件和軟件的兩點(diǎn)方法,能顯著降低電磁干擾的程度,具有廣泛的應(yīng)用意義。在硬件方面所采取的措施,能盡量減少電磁干擾的產(chǎn)生;在軟件方面采取的最適宜的空間矢量PWM模式比對稱PWM模式,能減少電磁干擾30%,搖擺的PWM載波比固定的載波信號電磁干擾減少了12DB,進(jìn)一步可減少18DB。