
數(shù)字掃描探針顯微鏡(scanning probe microscope,SPM)是研究納米的重要工具,它利用探針和樣品的不同互相作用來探測(cè)表面或界面在納米尺度上表現(xiàn)出的物理性質(zhì)和化學(xué)性質(zhì),,它的問世對(duì)表面科學(xué)、物理學(xué),、微電子學(xué),、電子材料學(xué)、先進(jìn)材料和納米材料等研究領(lǐng)域技術(shù)重要的意義,,與此同時(shí),,數(shù)字信號(hào)處理技術(shù)已經(jīng)發(fā)展得相當(dāng)成熟,,DSP技術(shù)也已經(jīng)廣泛地應(yīng)用于通信、測(cè)量,、多媒體,、消費(fèi)電子產(chǎn)品等領(lǐng)域,由于把DSP和SPM結(jié)合在一起是SPM儀器發(fā)展的必然方向,,它能使SPM性能更趨于完善,,為此,本文介紹如何用TMS320C5416來實(shí)現(xiàn)這一設(shè)想,!
SPM系統(tǒng)方案及其缺陷
現(xiàn)有的SPM系統(tǒng)主要基于PCI形式,,該方案中,計(jì)算機(jī)通過PCI卡和SPM控制板保持通信,,整個(gè)電子控制系統(tǒng)的流程圖如圖1所示,。

此系統(tǒng)由掃描器、電子控制板和控制處理軟件三部分組成,,其中掃描器是執(zhí)行部分,它通過步進(jìn)馬達(dá)和壓電陶瓷管的三維伸縮來實(shí)現(xiàn)掃描探針對(duì)樣品表面的掃描,;控制處理軟件是中央控制部分,,通過控制軟件可設(shè)置掃描參數(shù)、對(duì)掃描過程實(shí)行實(shí)時(shí)調(diào)節(jié)和監(jiān)控(再線掃描控制)以及對(duì)掃描圖像進(jìn)行分析
處理(離線數(shù)據(jù)分析),,電子控制板則是連接控制軟件和掃描器的中間部分,,擔(dān)負(fù)著在掃描過程中的將控制軟件下達(dá)的指令時(shí)實(shí)的轉(zhuǎn)化為對(duì)掃描器的具體操作任務(wù),因此,,電子控制系統(tǒng)的精確程度和對(duì)指令的反應(yīng)速度直接影響著成像的效果,,設(shè)計(jì)好的電子控制系統(tǒng)對(duì)整個(gè)STM來說至關(guān)重要。
雖然基于PCI形式的系統(tǒng)在一般控制,、傳輸速度及成像效果上都能達(dá)到基本要求,,但作為精密儀器,其效果還遠(yuǎn)不夠,,主要缺點(diǎn)如下:
?。?)PC機(jī)的開關(guān)電源對(duì)高精度的A/D,D/A芯片干擾太大,。
?。?)PCI卡每次只能對(duì)一路信號(hào)尋址,系統(tǒng)的實(shí)時(shí)性較低,。
?。?)由于需要較大的計(jì)算資源開銷并要運(yùn)行一個(gè)復(fù)雜的非線性校正算法,該控制板需要一個(gè)處理能力強(qiáng)的處理器,。
?。?)存儲(chǔ)器及握手方式不夠理想,。
系統(tǒng)設(shè)計(jì)思想
為了解決上述缺點(diǎn),筆者給出了一種基于DSP的新型數(shù)字式SPM系統(tǒng)的設(shè)計(jì)方案,,新方案的系統(tǒng)框圖如圖2所示,。

該方案和圖1的明顯區(qū)別的是,圖2方案在SPM控制板上添加了一塊DSP芯片,,SPM控制板和計(jì)算機(jī)信息交換將先通過DSP作相應(yīng)處理,,然后再送至對(duì)方,DSP和計(jì)算機(jī)的通信采用全雙工RS-232串口通信方式,。
DSP控制板的結(jié)構(gòu)和功能
經(jīng)過對(duì)SPM儀器的控制流程,、時(shí)序要求、掃描方式,、反饋模型和實(shí)時(shí)性進(jìn)行全面分析,,并對(duì)幾種DSP芯片的性能的比較,本設(shè)計(jì)決定采用TI公司的54X系列DSP芯片,,該系統(tǒng)的DSP的運(yùn)算處理速度,、處理精度、功耗都能滿足SPM應(yīng)用系統(tǒng)的反饋要求,。
TMS320VC5416是TI公司的16位定點(diǎn)DSP,,其時(shí)鐘頻率為160MHz,能夠?qū)崿F(xiàn)高速運(yùn)算(160MIPS)和大容量存儲(chǔ),,片上有128×16位的SRAM和16K×16位ROM,。TMS320VC5416芯片內(nèi)核和I/O口分別采用1.5V和3.3V供電,故可有效降低功耗,。
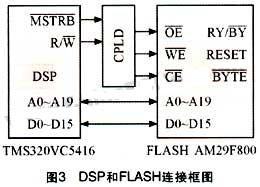
理論上,,該DSP片上SDRAM的容量應(yīng)該能夠滿足數(shù)據(jù)存儲(chǔ)要求,因此,,為了減小系統(tǒng)的復(fù)雜性,,就不再進(jìn)行片外SRAM的擴(kuò)展,這也就局限了系統(tǒng)以后的完善和升級(jí),,為了提出程序運(yùn)行速度,,設(shè)計(jì)采用Flash Bootloader方式,即先將程序下降到片外Flash中,,在DSP上電后,,系統(tǒng)將自動(dòng)將Flash中的程序讀入到片上RAM中運(yùn)行,所以本設(shè)計(jì)也在DSP外部擴(kuò)展一片256×16位的Flash,。設(shè)計(jì)時(shí)選用的是AMD公司的AM29F800B型號(hào)Flash,,容量為8Mbit,可操作在128×16bit和512K×16bit數(shù)據(jù)存儲(chǔ)形式,,本設(shè)計(jì)采用512K×16bit,,其硬件連接如圖3所示,。
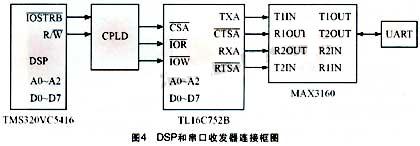
DSP和計(jì)算機(jī)的串口通信采用一片異步收發(fā)器和一片多協(xié)議收發(fā)器,異步收發(fā)器選用TL16C52B,,該器件的發(fā)送接收各帶有64字節(jié)FIFO和Modem接口信號(hào),,并分A、B兩路收發(fā),,最高傳輸速率可達(dá)1.5Mbps波特率,。采用3.3V電源供電,而且接口簡(jiǎn)單,,可以與DSP直接連接,,每個(gè)通道的18個(gè)寄存器均可用于控制串行異步通信的工作方式及反饋狀態(tài),經(jīng)采用A0-A2尋址,。多協(xié)議收發(fā)器使用MAX3160芯片,,它的異步串口電平可配置成RS323/RS485/RS422多種接口電平標(biāo)準(zhǔn),本系統(tǒng)選擇RS232,,并采用四線制(RXD,、TXD、RTS,、CTS),。其硬件連接如圖4所示。
另外,,本系統(tǒng)可選用了一片CSC公司的CPLD芯片(型號(hào)為CY37032)來實(shí)現(xiàn)各個(gè)接口間的數(shù)字邏輯操作(比如Flash控制邏輯、串口控制邏輯,、SPM控制板上A/D和D/A控制邏輯以及讀寫信號(hào)等),。系統(tǒng)的控制邏輯清晰有序,而且采用VHDL語(yǔ)言編寫程序并不復(fù)雜,,系統(tǒng)調(diào)試采用TI公司的CCS2.2開發(fā)環(huán)境,,該平臺(tái)包括代碼編輯和調(diào)試并可執(zhí)行代碼生成工具,能支持設(shè)計(jì)和開發(fā)的整個(gè)流程,。
系統(tǒng)電源系統(tǒng)主要有±12V,、±150V、±15V,、±5V,、3.3V、1.5V幾部分,,其中±12V向模擬電路供電,,±150V是壓電陶瓷掃描高壓運(yùn)放電路的電源,±15V向步進(jìn)電機(jī)供電,,其余的均為數(shù)字電路供電,,由于整個(gè)電路電源種類多,,大量芯片同時(shí)開啟和關(guān)閉會(huì)造成電源和地線上的電壓和電流的較大波動(dòng),影響芯片的正常工作,,所以,,除了在地線和電源之間并聯(lián)電容、增加π型濾波外,、還要對(duì)模擬電路和數(shù)字電路,,高速電路和低速電路進(jìn)行分區(qū)布局,以盡量提高系統(tǒng)的抗干擾能力,。
基于DSP的SPM系統(tǒng)體系結(jié)構(gòu)與功能
SPM系統(tǒng)在運(yùn)行之前,、通過控制軟件上的掃描控制面板、用戶可以調(diào)整掃描發(fā)生器電路的工作參數(shù),,如掃描范圍,、X偏移、Y偏移,、掃描速率等,,然后通過反饋控制面板,用戶可以實(shí)時(shí)調(diào)整Z向反饋電子學(xué)的工作狀態(tài),,如比例增益,、積分增益,反饋環(huán)路和偏壓,。最后通過步進(jìn)馬達(dá)控制面板來設(shè)定前進(jìn),、后退或者停止,并設(shè)定步數(shù)給馬達(dá)驅(qū)動(dòng)器相應(yīng)的驅(qū)動(dòng)脈沖,。圖
5所示是SPM控制板的結(jié)構(gòu)框圖,。
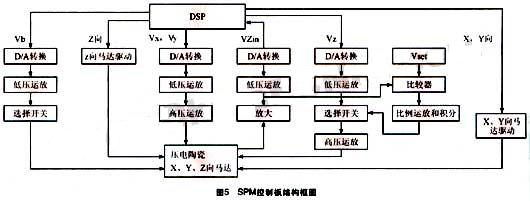
控制板上使用的是一片A/D轉(zhuǎn)換器,型號(hào)是MAX120,,它能將納安量級(jí)電流信號(hào)轉(zhuǎn)換成VZin數(shù)字信號(hào),。MAX120是12bitA/D轉(zhuǎn)換器,采用5V供電,,轉(zhuǎn)換速率可達(dá)1.6μs,,采樣率達(dá)500KHz,它有五種轉(zhuǎn)換模式,,全控制模式,,獨(dú)立控制模式、慢存儲(chǔ)器模式,、ROM模式和連續(xù)轉(zhuǎn)換模式,,模式控制引腳和其他引腳的組合邏輯可以選擇五種模式之一,本設(shè)計(jì)選擇的是連續(xù)轉(zhuǎn)換模式,,其FIFO讀周期可達(dá)15ns,,故可減少中斷等待時(shí)間,,能適合于系統(tǒng)速度要求,四片D/A轉(zhuǎn)換器選用一片12bit的AD565和三片14bit的AD7840,,AD565用于轉(zhuǎn)換Z向控制信息以得到電流信號(hào)VZout,,再經(jīng)過高壓運(yùn)放來驅(qū)動(dòng)馬達(dá)產(chǎn)生位移。三片AD7840分別轉(zhuǎn)化Vb,、Vx和Vy三方向的控制信息,,AD7840采用±5V的雙電源供電,轉(zhuǎn)換時(shí)間為21ns,,其片內(nèi)輸入鎖存器和DAC鎖存器,,可有效保證轉(zhuǎn)換數(shù)據(jù)不丟失,而AD565則采用±12V雙電源供電,,轉(zhuǎn)換時(shí)間為30ns,。
TMS320VC5416片內(nèi)有一個(gè)16位的定時(shí)器,定時(shí)器的輸出能啟動(dòng)12bitA/D轉(zhuǎn)換,,并可采樣Z信號(hào)(調(diào)整掃描探針跟樣品表面距離),,可屏蔽的定時(shí)中斷服務(wù)程序安裝著XY掃描算法和掃描器的非線性校正算法,XY掃描算法用來進(jìn)行X向和Y向的掃描位移計(jì)算,,非線性校正算法則根據(jù)掃描點(diǎn)上的隧道電流的大小進(jìn)行相應(yīng)的調(diào)整,,然后啟動(dòng)3路D/A轉(zhuǎn)換,對(duì)反饋的X,、Y,、Z三路信號(hào)進(jìn)行放大,都作用于SPM頭部,。由于其隧道電流信號(hào)只有納安量級(jí),,不容易被直接測(cè)量,故應(yīng)將其放大為相應(yīng)的電壓信號(hào),,再進(jìn)行相應(yīng)的處理,對(duì)掃描探針和樣品之間的偏置電壓Vb,,可在掃描圖像時(shí)使其大小恒定,,由于要求的噪音很小。因此可以用標(biāo)準(zhǔn)電壓供電,,以保證低噪音,,但在進(jìn)行掃描時(shí),Vb不再是一恒定的值,,而是要控制軟件設(shè)定的變化關(guān)系來變化,,Vset是通過控制軟件設(shè)置的標(biāo)準(zhǔn)電壓,它可控制Z向電壓值的范圍,,每次采集到的Z向電壓值和Vset進(jìn)行比較,,其輸出經(jīng)過比例運(yùn)放器和積分器可決定經(jīng)D/A轉(zhuǎn)換器的電壓是否作用于SPM頭部,。
在對(duì)SPM電子控制系統(tǒng)和控制軟件進(jìn)行調(diào)試和改進(jìn)后,筆者得到了如圖6所示的金膜表面圖像,。
結(jié)束語(yǔ)
由于DSP是高速處理器,,所以本設(shè)計(jì)比基于DSP的設(shè)計(jì)方案要復(fù)雜很多,同時(shí)設(shè)計(jì)時(shí)要特別意識(shí)到信號(hào)完整性問題的重要性,,所以設(shè)計(jì)當(dāng)中要對(duì)阻抗控制,,反射和信號(hào)終端進(jìn)行匹配,并對(duì)DSP,、A/D,、D/A器件進(jìn)行物理隔離,同時(shí)要考慮串?dāng)_,、電源退耦等問題,,盡量避免信號(hào)完整性對(duì)設(shè)計(jì)性能的影響。
實(shí)驗(yàn)證明,,利用DSP實(shí)現(xiàn)SPM的反饋系統(tǒng)設(shè)計(jì)與基于PCI系統(tǒng)相比,,具有接口簡(jiǎn)單,穩(wěn)定性好和精度高等優(yōu)點(diǎn),,筆者今后還將進(jìn)一步設(shè)計(jì)新的DSP算法,,并增強(qiáng)圖像特征,同時(shí)在硬件上還需提高系統(tǒng)的擴(kuò)展性,,降低反饋系統(tǒng)的噪聲,,增強(qiáng)操作系統(tǒng)的穩(wěn)定性。