
動(dòng)力和車速已經(jīng)不再是消費(fèi)者對(duì)汽車性能的唯一追求,人們?cè)絹碓疥P(guān)心駕車時(shí)的舒適感、安全保障、功能的易用性,和對(duì)環(huán)境的保護(hù)等方面。因此,除了車身系統(tǒng)(Car body)和傳動(dòng)系統(tǒng)(Power Train)等傳統(tǒng)的汽車控制單元以外,安全系統(tǒng)(Safety)和車載資通娛樂系統(tǒng)(Telematics / Infotainment)也隨著電子技術(shù)的進(jìn)步而逐漸成熟。
現(xiàn)代的汽車電子系統(tǒng)中,電子控制組件(ECU)因在上述系統(tǒng)中賦予汽車更高效和更具智能性的操控能力而扮演了重要角色,也實(shí)現(xiàn)了諸如電源、車燈和門窗等自動(dòng)檢測功能,給駕駛提供了更大便利。
汽車中的電子系統(tǒng)和組件平均達(dá)到80多個(gè),它們之間越來越復(fù)雜的連接和通信功能對(duì)總線技術(shù)提出了需求。車燈、發(fā)動(dòng)機(jī)、電磁閥、空調(diào)等設(shè)備的傳統(tǒng)連接方式為線纜連接,而如果電子元件之間也用電纜連接則必然造成連接復(fù)雜性的提高、可靠性的下降,和整體重量的上升;此外,伴隨而來的線纜的磨損和老化現(xiàn)象也將使汽車的安全性能降低。
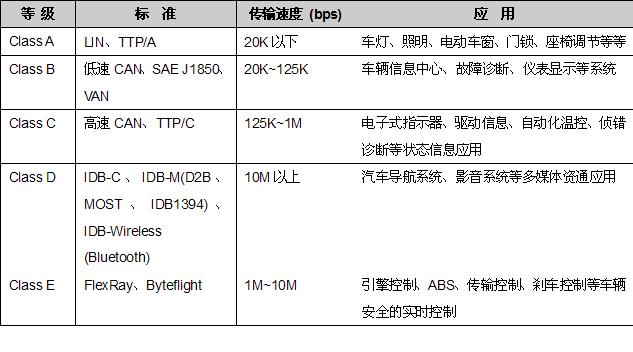
為避免線纜帶來的各種麻煩,車載網(wǎng)絡(luò)(In-Vehicle Network)中應(yīng)用標(biāo)準(zhǔn)化總線技術(shù)則成為較理想的解決方式。按不同的技術(shù)特點(diǎn)和應(yīng)用領(lǐng)域,車載總線技術(shù)可分為五類。如表一所示,第一類LIN、TTP/A等總線傳輸速度最低,適用于車體控制;第二類中速總線,如低速CAN、SAE J1850、VAN(Vehicle Area Network)等,適用于對(duì)實(shí)時(shí)性要求不高的通信應(yīng)用;第三類包括高速CAN、TTP/C等技術(shù),適用于高速、實(shí)時(shí)死循環(huán)控制的多路傳輸網(wǎng)絡(luò);第四類如IDB-C、IDB-M(D2B、MOST、IDB1394))、IDB-Wireless(Bluetooth)等,一般應(yīng)用于車載資通娛樂網(wǎng)絡(luò);第五類傳輸速度最高,用于最具關(guān)鍵性、實(shí)時(shí)性最高的人身安全系統(tǒng),包括FlexRay和Byteflight等。
本文將主要討論LIN總線技術(shù)規(guī)格及在門控系統(tǒng)中的應(yīng)用實(shí)例。
表一 車載網(wǎng)絡(luò)總線標(biāo)準(zhǔn)
LIN技術(shù)概況
LIN總線全稱為區(qū)域互連網(wǎng)絡(luò)(Local Interconnect Network),是一種結(jié)構(gòu)簡單、配置靈活、成本低廉的新型低速串行總線,和基于序列通訊協(xié)議的車載總線的子集系統(tǒng)(Sub-bus System)。
LIN總線為主從節(jié)點(diǎn)構(gòu)架,即一個(gè)主節(jié)點(diǎn)(Master Node)最多可支持16個(gè)從節(jié)點(diǎn)(Slave Node);在從節(jié)點(diǎn)中不用晶振(Crystal Oscillator)或陶瓷諧振器(Ceramic Resonator)時(shí)鐘,也能做到自同步性。LIN基于UART / SCI接口協(xié)議,可實(shí)現(xiàn)極低的軟硬件成本;其信號(hào)傳播時(shí)間可預(yù)先計(jì)算,以滿足傳輸?shù)拇_定性。總線電纜的長度最多可以擴(kuò)展到40米左右,數(shù)據(jù)傳輸率可達(dá) 20 kbps。
1999年,LIN 1.0版推出后,不斷有新版本出現(xiàn)(LIN 1.3、LIN 2.0),持續(xù)改進(jìn)了LIN總線的性能與適用性。美國汽車工程師協(xié)會(huì)(SAE)下屬的車輛架構(gòu)任務(wù)組(Task Force)也基于LIN 2.0提出J2602規(guī)范,此舉讓LIN從節(jié)點(diǎn)所需要的軟件代碼長度縮短,進(jìn)一步降低了LIN 2.0中軟件單元的復(fù)雜性,可實(shí)現(xiàn)更高效的系統(tǒng)配置。此外,主流廠商也會(huì)針對(duì)LIN的性能推出改進(jìn)版本或技術(shù),例如意法半導(dǎo)體的LINSCI。
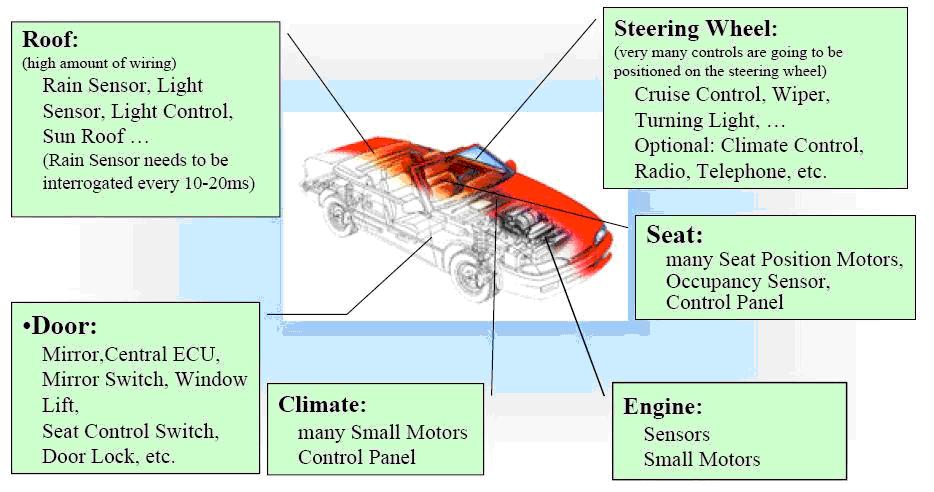
圖一 LIN總線應(yīng)用領(lǐng)域
LIN主要用作CAN等高速總線的輔助網(wǎng)絡(luò)或子網(wǎng)絡(luò),能為不需要用到CAN的裝置提供較為完善的網(wǎng)絡(luò)功能,包括空調(diào)控制(Climate Control)、后視鏡(Mirrors)、車門模塊(Door Modules)、座椅控制(Seats)、智能性交換器(Smart Switches)、低成本傳感器(Low-cost Sensors)等。在帶寬要求不高、功能簡單、實(shí)時(shí)性要求低的場合,如車身電器的控制等方面,使用LIN總線可有效的簡化網(wǎng)絡(luò)線束、降低成本、提高網(wǎng)絡(luò)通訊效率和可靠性。
LIN網(wǎng)絡(luò)架構(gòu)
如上文所述,LIN網(wǎng)絡(luò)基于主從節(jié)點(diǎn)構(gòu)架而形成網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)。主節(jié)點(diǎn)需要向從節(jié)點(diǎn)發(fā)出周期性的檢測信號(hào),檢測結(jié)果由從節(jié)點(diǎn)反饋給主控制器。其中周期根據(jù)事件檢測的實(shí)時(shí)性要求而設(shè)定。
如圖二所示,LIN的信號(hào)由一個(gè)由主任務(wù)提供的標(biāo)頭(Header)和由從任務(wù)處理的響應(yīng)部分(Response)構(gòu)成。標(biāo)頭包含一個(gè)13位的同步間隔字段(Synch Break Field)、一個(gè)由主任務(wù)產(chǎn)生的同步字段(Synch Field),以及一個(gè)辨識(shí)字段(Identifier Field)。其中每一個(gè)字節(jié)字段都以串行位元組方式發(fā)送,起始位的第一位為“0”,而終止位為“1”。由主任務(wù)執(zhí)行的信號(hào)標(biāo)頭會(huì)依整個(gè)LIN叢集的進(jìn)度表決定每個(gè)信號(hào)的傳輸時(shí)間,以確保數(shù)據(jù)傳輸?shù)拇_定性及避 免網(wǎng)絡(luò)超載的危險(xiǎn)。在LIN網(wǎng)絡(luò)中只有主節(jié)點(diǎn)采用晶體振蕩器來為系統(tǒng)提供精確的基本時(shí)鐘,此時(shí)鐘會(huì)嵌入上述的同步字段中,讓從任務(wù)能與主節(jié)點(diǎn)時(shí)序同步。LIN信號(hào)的響應(yīng)部分包含一個(gè)數(shù)據(jù)域位(Data Filed),長度為2 / 4 / 8個(gè)字節(jié),和一個(gè)長度為一個(gè)字節(jié)的驗(yàn)證字段(Checksum Field)。

圖二 LIN信號(hào)結(jié)構(gòu)示意圖
LINSCI
LINSCI可以集成在8位MCU中,可實(shí)現(xiàn)標(biāo)頭偵測(Header Detection)、指示器(Identifier)和非相關(guān)字節(jié)過濾(Irrelevant Byte Filtering)、延伸性錯(cuò)誤偵測(Extended Error Detection)和再同步化(Resynchronisation)等功能。其作用是使從設(shè)備的LIN總線功能更有效地發(fā)揮。
LINSCI也可以實(shí)現(xiàn)更高的精度。LIN總線的波特率(Baud Rate)預(yù)定標(biāo)器(Prescaler)一般為8位整型值,分辨率有限,使得很難達(dá)成標(biāo)準(zhǔn)SCI位時(shí)間取樣原則所需要的誤差率為2%的準(zhǔn)確性。LIN總線波特率一般為10kbps和20kbps,如果按20kbps計(jì)算,假設(shè)CPU頻率為8MHz,由于LIN的頻率寬容度為15%,量化錯(cuò)誤將達(dá)到2.33%。LINSCI的預(yù)定標(biāo)器則以12位無符號(hào)(Unsigned)定點(diǎn)值(即LDIV)代替8位整型值,量化誤差則可下降到0.15%。
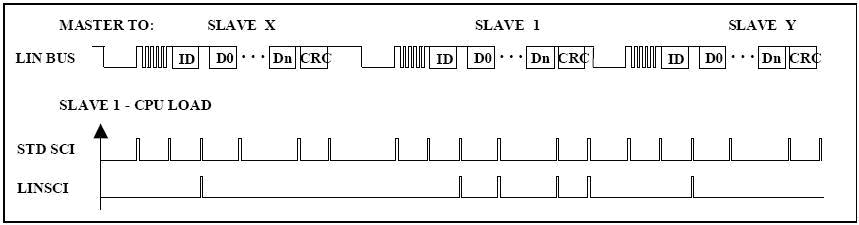
圖三 LINSCI數(shù)據(jù)結(jié)構(gòu)圖
實(shí)現(xiàn)LIN系統(tǒng)的最優(yōu)化包含許多方面因素。雖然以標(biāo)準(zhǔn)SCI所建立的LIN網(wǎng)絡(luò)已具備極佳性能,但LIN數(shù)據(jù)傳輸所需要的頻寬和CPU負(fù)荷,應(yīng)用上所需的頻率準(zhǔn)確性,以及LIN界面的穩(wěn)定和有效性等都是應(yīng)該考慮的因素。此外,硬件技術(shù)上的強(qiáng)化也十分必要。
ST的LINSCI即可通過這些手段實(shí)現(xiàn)更高的效率和更低的成本。首先,經(jīng)過強(qiáng)化的硬件SCI端口減少了CPU負(fù)載,相應(yīng)提高了系統(tǒng)效能。低成本主要由高集成度獲得,其內(nèi)部集成了1MHz震蕩器、帶有運(yùn)算放大器的快速10位ADC,以及帶有低電壓檢測器的可配置重啟電路,簡化了外部電路和系統(tǒng)設(shè)計(jì),降低了制造成本。同時(shí),8KB的擴(kuò)展內(nèi)存能在單一供給電壓下操作,除了提供更快速的編程能力,還降低了電路板的復(fù)雜程度。
汽車門控系統(tǒng)架構(gòu)實(shí)例
以汽車門控系統(tǒng)舉例。如圖四所示,目前中高檔車型的門控系統(tǒng)主要包括車門鎖(Lock)、防盜門鎖(Dead Lock Latch)、動(dòng)力車窗(Power Window)、踏腳燈(Footstep light),及切換面板照明(Switch Panel Illumination)等。其主節(jié)點(diǎn)為一個(gè)與車體CAN網(wǎng)絡(luò)相連的中央車體控制單元(Central Body ECU),每個(gè)車門都有一個(gè)車門模塊,即按四門的車身則為DM-Driver(司機(jī)位置)、DM-Passenger(副駕駛位置)、DM-RearRight(右后門)和DM-RearLeft(左后門)提供門鎖和動(dòng)力車窗等功能;另外兩個(gè)前門還有MMR和MML左右后視鏡控制模塊。駕駛端的中央切換面板(Central Switch Panel)是一個(gè)獨(dú)立的從節(jié)點(diǎn),控制所有的動(dòng)力車窗、手動(dòng)門鎖及后視鏡等功能。

圖四 LIN網(wǎng)絡(luò)門控系統(tǒng)示意圖
汽車門控系統(tǒng)的應(yīng)用場景對(duì)LIN網(wǎng)絡(luò)提出了以下需求:當(dāng)主控器收到從遙控鑰匙發(fā)出的有效信號(hào)時(shí),必須要啟動(dòng)門控系統(tǒng),從節(jié)點(diǎn)通常通過CAN總線接收;當(dāng)正確的鑰匙打開前門時(shí),也同時(shí)啟動(dòng)門控系統(tǒng);從節(jié)點(diǎn)會(huì)直接反應(yīng)而不需經(jīng)由與主控器的通訊;切換面板的詢問動(dòng)作(Polling)功能,以確保響應(yīng)對(duì)各個(gè)驅(qū)動(dòng)裝置控制,如動(dòng)力車窗、后視鏡調(diào)整、門鎖等的主動(dòng)式切換;對(duì)所有從節(jié)點(diǎn)的詢問功能,以得到車窗升降的位置狀態(tài),以及車門的開關(guān)情況;以及系統(tǒng)對(duì)所有從節(jié)點(diǎn)的睡眠模式控制(即電池供應(yīng)操作模式)等。因此門控系統(tǒng)的MCU也需要與上述功能相符,例如必須針對(duì)車窗的升降提供防夾(Anti-Pinch)功能、馬達(dá)的PWM控制及車窗位置監(jiān)控;能以SPI接口來控制門鎖馬達(dá);對(duì)于車鑰匙的拔出及開門的動(dòng)作,能夠提供電源供應(yīng)模式的接觸式監(jiān)控,以及對(duì)后視鏡及切換面板的操控功能等。
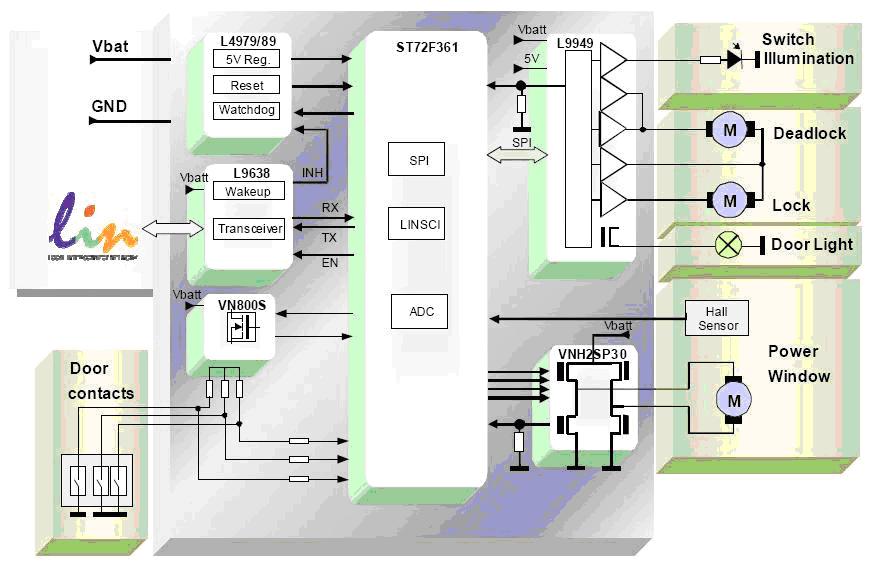
圖五 門控模塊功能架構(gòu)圖
對(duì)上述功能的參數(shù)設(shè)置上,也有一些需要考慮的因素,例如時(shí)序的準(zhǔn)確性和動(dòng)作的實(shí)時(shí)性等。以手動(dòng)打開汽車門鎖的動(dòng)作為例,從鑰匙插入門鎖到打開,需要快速的響應(yīng),可接受的延遲必須小于200ms。而在此期間,傳動(dòng)馬達(dá)大約需要100ms打開門鎖,因此留給MCU來完成從低功率模式啟動(dòng)、偵測到鑰匙,并觸發(fā)傳動(dòng)裝置等動(dòng)作的所有時(shí)間只有100ms。LIN總線波特率一般為10kbps或20kbps,如果按最快的20kbps計(jì)算,為保證數(shù)據(jù)傳輸?shù)某晒Γ瑒tCPU的響應(yīng)時(shí)間必須小于1ms。此外,針對(duì)系統(tǒng) 的安全性(如防夾)和便利性(如門鎖偵測)等功能,都會(huì)有實(shí)時(shí)性的要求。
時(shí)序的準(zhǔn)確性是為了實(shí)現(xiàn)正確的運(yùn)作和流程。車門模塊需要一個(gè)寬容度小于3%的時(shí)間參考,車窗防夾(Anti-Pinch)功能的復(fù)雜算法就需要這種準(zhǔn)確性。
功耗與節(jié)能是對(duì)于多數(shù)ECU來說是十分關(guān)鍵的因素。以門控系統(tǒng)來說,系統(tǒng)在車輛熄火以后仍需進(jìn)行間隔性的監(jiān)控詢問動(dòng)作,會(huì)造成電力的持續(xù)消耗。而監(jiān)控的延遲間隔設(shè)定很難取舍,因?yàn)闀r(shí)間間隔太長,則會(huì)造成反應(yīng)延遲;太短的話,又會(huì)增加系統(tǒng)的功耗。
故障安全設(shè)計(jì)
故障和安全也是系統(tǒng)設(shè)計(jì)的重點(diǎn),例如短路時(shí)總線線路的故障安全(Fail-Safe)機(jī)制。因?yàn)長IN總線與車體CAN總線系統(tǒng)相比,不具有容錯(cuò)性能(Fault Tolerant),因此每個(gè)節(jié)點(diǎn)必須有能力分辨出短路的總線線路,同時(shí)反應(yīng)動(dòng)作必須遵循特定的程序。
L9638是ST推出的LIN收發(fā)器,可提供額外的安全故障功能,可有效處理短路等故障。當(dāng)MCU發(fā)現(xiàn)短路的LIN總線線路,ECU可自關(guān)閉;而收發(fā)器在消除短路狀況后仍能夠重新啟動(dòng)。
結(jié)論
通過靈活的配置,LIN可在多種應(yīng)用中發(fā)揮全面的性能。例如將LIN協(xié)議以硬件方式建置(LINSCI)可以增加系統(tǒng)的可靠性和簡化LIN的驅(qū)動(dòng)程序碼。MCU的設(shè)計(jì)也是一大關(guān)鍵。以ST72F361為例,它在標(biāo)準(zhǔn)MCU上提供先進(jìn)的SCI接口,并支持LIN的功能,除了能降低CPU的負(fù)荷外,也能省卻較高成本的精準(zhǔn)時(shí)序資源。
LIN總線屬于低速率傳輸標(biāo)準(zhǔn),不具備CAN總線的性能,主要定位于CAN的關(guān)鍵性應(yīng)用以外的場景中(高速、高效率、高容錯(cuò)性能等)。設(shè)計(jì)車輛電子系統(tǒng)時(shí),需要根據(jù)具體的需求和技術(shù)要求合理選用適合的技術(shù)標(biāo)準(zhǔn),才能讓LIN和CAN發(fā)揮自己特有的優(yōu)勢,并節(jié)省成本。LIN總線以其低成本及高可靠性贏得了獨(dú)特的市場空間,預(yù)計(jì)在歐洲新出廠的車輛中,LIN總線的應(yīng)用將占有相當(dāng)大的比重。