
摘 要: 介紹了一種應用于無人機的微型渦輪噴氣式發(fā)動機數(shù)字控制系統(tǒng)" title="控制系統(tǒng)">控制系統(tǒng)的設計與實現(xiàn)。該系統(tǒng)基于C8051F021單片機和MicroStar嵌入式實時操作系統(tǒng),實現(xiàn)了小型渦噴發(fā)動機自動點火、啟動、推力控制與穩(wěn)定、超溫超速保護、系統(tǒng)自檢、冷卻等功能。該系統(tǒng)具有體積小、重量輕、功能全的特點。
關鍵詞: C8051F021 MicroStar RTOS 渦噴發(fā)動機 PID
與活塞發(fā)動機相比,渦輪噴氣發(fā)動機(以下簡稱渦噴發(fā)動機)在推重比方面的優(yōu)勢無可爭議。如果將之微型化,將使小型無人飛行器獲取較高的速度和載荷能力。因此,研制微型渦噴發(fā)動機在軍用和民用領域都有深遠的意義。目前,美、德、丹麥等國家都有相當成熟的微型渦噴發(fā)動機產品,已成功應用到航模和無人機上。但在國內,無論是發(fā)動機本身還是其控制系統(tǒng),都屬于較新領域[1]。
本文針對國產某系統(tǒng)發(fā)動機,設計了基于C8051F021和MicroStar RTOS的微型渦噴發(fā)動機通用控制系統(tǒng)。它以處理器為核心,集傳感器、伺服機構、人機接口" title="人機接口">人機接口為一體、體積小、重量輕,提供了與主控系統(tǒng)的指令接口和與地面測試設備的檢測接口,功能完善。
微型渦噴發(fā)動機計算機控制系統(tǒng)的整體結構如圖1所示。
控制器接收遙控接收機(或主控計算機)發(fā)出的PCM(Pulse Coding Modulation,脈沖編碼調制)形式的推力和起停指令,驅動油泵、油閥、點火器等伺服機構,實時測量發(fā)動機的溫度和轉速,完成自動點火、加速、減速、轉速穩(wěn)定、超溫超速保護等控制功能,并將狀態(tài)參數(shù)通過RS232總線實時發(fā)送到PC機。通過手持終端,可修改系統(tǒng)參數(shù)。
為便于系統(tǒng)調試和測試發(fā)動機性能,還開發(fā)了運行于Windows平臺的實時檢測軟件ECU1.0(Engine Control Unit, Version1.0)。
1 硬件設計
C8051F021單片機是美國Cygnal公司推出的一款高性能8位SOC單片機。主要有以下優(yōu)點:
(1)采用了流水線技術,峰值處理速度可達25MIPS,遠遠高于其它51單片機。
(2)具有12位8通道逐次比較式ADC,數(shù)據(jù)轉換速率可達100ksps。
(3)具有4K字節(jié)的片上RAM和64K字節(jié)的Flash程序存儲器。在本應用系統(tǒng)中,無需擴展存儲器。
(4)可提供五路可編程的PWM控制信號。
(5)豐富的定時器資源,具有五個硬件定時器。
(6)提供I2C總線控制模塊和兩個UART口。
(7)片內FLASH支持IAP(在應用可編程)。因此,不常修改的數(shù)據(jù)如配置參數(shù)、查詢表等可直接存放于片內的FLASH內,而不需外擴非易失性存儲體。
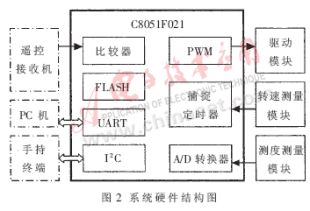
C8051F021單片機具有豐富的片上硬件資源及高運算速度,對本控制系統(tǒng),幾乎不需擴展即可滿足控制系統(tǒng)對硬件資源的需求并有較大裕量。圖2為系統(tǒng)硬件結構圖。
1.1 轉速測量模塊
發(fā)動機的轉速采用紅外對管來測量。發(fā)動機的軸上鉆有一通孔,安裝時使發(fā)送-接收管的連線通過該孔。發(fā)動機每轉一周,紅外接收管會導通兩次。由于通、斷狀態(tài)是漸變的,再加上普通紅外管開關速度較低,在發(fā)動機高速運轉(可達120000RPM)時,接收管輸出的脈沖信號幅值很小,而且上升沿/下降沿較為平緩,單片機無法準確識別,必須加以整形。整形電路如圖3所示。
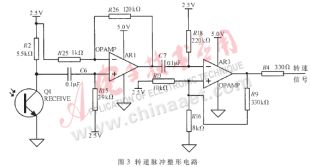
信號通過電容C6耦合至運放AR1的同相輸入端,(以2.5V為參考點)進行高倍數(shù)放大,以保證即使在高轉速下,脈沖的峰-峰幅值也接近5V供電電壓。運放AR3用于實現(xiàn)回滯比較器,提高抗干擾能力,其輸出信號至單片機T4EX腳。利用定時器4的邊沿捕捉功能可方便地測出相鄰脈沖間的時間間隔,從而換算出速度。
1.2 溫度測量模塊
發(fā)動機體內的溫度是發(fā)動機安全、可靠工作的重要指標。由于發(fā)動機較小,考慮到裝配的方便,以尾噴管的溫度表征發(fā)動機的工作溫度。
試驗表明,尾噴管的溫度最高可達900℃。出于測溫" title="測溫">測溫范圍、成本等方面的考慮,選用鎳鉻-鎳硅(Ni,Cr,Si)熱電偶作為測溫元件。鎳鉻-鎳硅熱電偶具有良好的線性度,測溫范圍為0~1000℃。由于發(fā)動機對溫度測量精度的要求并不苛刻,采用熱敏電阻進行溫度補償。
1.3 PWM驅動模塊
系統(tǒng)中氣閥和點火器、啟動電機和油泵電機等伺服機構采用PWM方式控制。啟動電機、齒輪泵的工作電流較大,可達14A。宜選用過流大且導通電阻小的MOS管或壓降小的肖特基二極管。本系統(tǒng)選用過流為120A、導通電阻7.5mΩ的MOS管。但試驗表明,MOS管工作溫度仍然較高,故采用兩片并聯(lián)驅動方式。一路PWM控制單元的原理圖如圖4所示。
電阻R6的主要作用是當無控制輸入信號時(如線路故障、單片機復位過程中),MOS管保持關閉,伺服機構不動作。MOS管開通時,通過Q4對MOS管輸入電容快速充電;關斷時,MOS管的輸入電容通過D3和Q3快速放電。采用上述具有較高開關速度的電路,可有效減少MOS管的發(fā)熱量。
1.4 系統(tǒng)通訊總線
I2C總線成本低廉,連線簡單,并有一定的抗干擾能力,同時可連結多個器件,故選用I2C總線作為系統(tǒng)通訊總線。手持終端、信號燈均通過I2C總線與系統(tǒng)板連接,并由串轉并芯片PCF8574驅動。
2 系統(tǒng)軟件
本系統(tǒng)主要完成發(fā)動機控制任務與人機接口任務。直接采用處理器開發(fā)軟件時,由于時間上的并存,這兩個任務處理將嚴重耦合。此外,與人機接口相關的函數(shù)調用必須設計為非阻塞模式,否則,當出現(xiàn)諸如I2C總線等故障時,控制流程無法繼續(xù)向下執(zhí)行。
RTOS能合理地分配處理器資源,使多個任務在宏觀上達到并行運行的效果,可大大降低任務間的耦合,提高系統(tǒng)的可靠性。即使某個任務長時間被阻塞,也不會影響到其它任務。因此,采用RTOS進行軟件開發(fā)更為簡單和可靠。本系統(tǒng)采用MicroStar RTOS V1.0[3]。MicroStar RTOS是針對中低檔單片機而設計的嵌入式實時操作系統(tǒng)內核。它同時支持按時間片輪轉、按優(yōu)先級搶占、二者結合共三種調度策略,具有完善的任務管理功能可提供定時、延時服務,支持消息、信號(Signal)通訊機制,支持臨界代碼段保護,提供二進制、計數(shù)型信號量(Semaphore)同步對象等,支持Bottom-half中斷管理機制。
本控制器選用按優(yōu)先級搶占調度策略,系統(tǒng)時鐘周期設定為2ms。共創(chuàng)建了三個用戶任務:人機接口主任務、控制任務以及與PC機通訊任務。
2.1 MicroStar RTOS在51單片機上的移植
由于51單片機內核上的原因,為了代碼優(yōu)化,Keil C51編譯器采用一些獨特的方法,與ANSI C編譯器相比,有較大的差異。因而相對于其它硬件平臺,在51單片機上移植MicroStar RTOS時修改較多,主要包括以下幾類:
(1)Keil C51不僅有數(shù)據(jù)類型,還有存儲類型,因此為系統(tǒng)變量添加了存儲類型修飾符。
(2)默認情況下Keil C51對未能在寄存器中分配的臨時變量采用靜態(tài)分配策略,許多系統(tǒng)函數(shù)因此而不可重入,必須對這些函數(shù)添加reentrant函數(shù)來強迫編譯器在模擬棧中分配臨時變量。
(3)除了硬件堆棧外,Keil C51編譯器在軟件上實現(xiàn)了模擬棧,因此在堆棧保護中需加入對模擬棧的保護。
(4)修改 os_cpu.h 文件中的INITIAL_ STACK任務堆棧初始化宏、改寫os_Schedule調度函數(shù)等。這一點與其它平臺無異。
2.2 人機接口主任務
人機接口主任務主要負責系統(tǒng)自檢、鍵盤掃描、液晶顯示、指令解析等,其流程圖如圖5所示。

主任務有測試和正常兩種運行模式。在開機按特定鍵或系統(tǒng)自檢失敗時,將進入測試模式。測試模式中擁有系統(tǒng)參數(shù)設定、脈寬指令學習、測試各路伺服機構的權限,但不具備運行發(fā)動機的權限。正常模式下僅具備運行發(fā)動機的權限,但不能修改任何參數(shù),以降低對系統(tǒng)參數(shù)意外改寫的風險。在激活控制任務之前,主任務將進行包括程序代碼校驗、配置參數(shù)校驗、溫度傳感器檢查等的軟硬件模塊檢查。這些措施均能提高系統(tǒng)的可靠性。
MicroStar RTOS提供周期性定時服務。主任務通過os_SetTimer設定一個50ms的鍵盤掃描定時器、一個100ms的LCD顯示刷新定時器。當定時時間到時,定時器會給任務發(fā)送消息。調用os_GetMessage獲取消息后,調用鍵盤處理函數(shù)和顯示函數(shù)來分別處理與之對應的消息。
2.3 控制任務
一次完整的發(fā)動機運行可分為如圖6所示的幾個階段。控制任務按這些階段循環(huán)進行,任一階段內出現(xiàn)異常狀況,任務都進入停車狀態(tài)。具體階段為:
(1)待命階段。發(fā)動機的狀態(tài)滿足運行要求,等待以PCM碼方式輸入的啟動命令。規(guī)定以大車指令對應的脈寬為啟動命令。
(2)點火階段。電機轉速在設定的上下限內波動,助燃丁烷氣閥打開,向發(fā)動機體內注入易燃氣,同時開啟點火器對氣體加熱,當氣體點燃使尾噴管溫度升高到設定值時,認為點火成功。
(3)著車階段。油泵開始工作,供油量逐漸增大,點火器、氣閥、啟動電機先后關閉,發(fā)動機轉速開始加速。當轉速和溫度均超過設定值時,認為著車成功。
(4)熱車階段。發(fā)動機成功著車之后,不宜立即投入工作,需在慢車(怠速)狀態(tài)下持續(xù)運行一段時間。
(5)正常運行階段。PID控制算法投入運行。
(6)停車階段。油泵停止運行,啟動電機會根據(jù)溫度間歇性地開啟,在有利于發(fā)動機散熱的條件下,盡可能地節(jié)省電能。
3 控制律設計
按控制內容劃分,微型渦噴發(fā)動機的控制項目分為以下幾類:
(1)過程控制。使發(fā)動機迅速、穩(wěn)定、可靠地完成過渡工作狀態(tài),包括啟動控制、加速控制、減速控制。啟動控制保證發(fā)動機正常點火和順利啟動。加速控制的目的是在發(fā)動機不超溫的前提下,改變供油量,使加速時間盡可能縮短。減速控制使收油門時減油不致過猛,防止燃燒室貧油熄火。
(2)推力控制。目的是給發(fā)動機提供所需的推力。飛行器空中飛行時發(fā)動機推力不易直接測量,但發(fā)動機轉速能夠表征發(fā)動機的推力,故通過轉速控制" title="轉速控制">轉速控制實現(xiàn)推力控制。
(3)安全控制。目的是保證發(fā)動機安全、可靠地工作。包括超溫保護、超速保護、電池電壓欠壓保護等。
3.1 啟動控制
啟動時間越短越好,因而發(fā)動機增速要快。簡單地提高供油量雖然可以提高發(fā)動機的增速,但容易因過度“富油”而超溫。“富油”現(xiàn)象是指當供油量增速過快時,由于發(fā)動機的慣性大于油泵的慣性,使發(fā)動機轉速增量相對落后,吸入空氣相對油量不足,以致燃油燃燒不充分,嚴重時,發(fā)動機體內的溫度會急劇上升,尾氣中會出現(xiàn)火苗,這種現(xiàn)象對發(fā)動機極為有害。為減輕“富油”現(xiàn)象,在著車過程控制中引入溫度和升溫速度反饋。當溫度超過警戒值或者升溫速度超過警戒值時,供油量將停止增加。
3.2 轉速控制
轉速控制采用工程上常用的位置式數(shù)字PID控制算法。對本系統(tǒng)而言,控制量為油泵的PWM占空比" title="占空比">占空比。占空比為負值是沒有物理意義的,需在PID的輸出之上加入工作點,使輸出在工作點上下調整。轉速控制框圖如圖7所示。
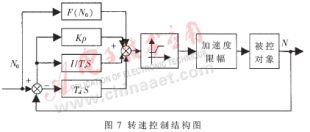
其中,F(xiàn)(N0)為工作點產生函數(shù),表示指令轉速N對應的占空比參考值,即工作點,通過試驗來獲取,軟件實現(xiàn)時采用查表法和線性插值法。限幅環(huán)節(jié)保證油泵占空比既不會小于怠速時的占空比,以避免熄火;也不會大于設定的最大值,以避免過速危險。油門加速度限幅環(huán)節(jié)一方面限制了加油速度,防止因加油過快而超溫;另一方面限制了收油速度,防止因收油過快而貧油熄火。油門加速度限幅簡單地實現(xiàn)了加速控制和減速控制。
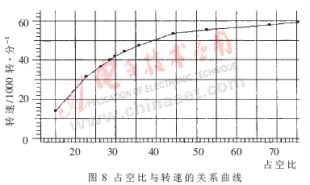
由于油泵占空比與發(fā)動機轉速間的非線性關系(如圖8所示),采用了分段PID方法,即不同階段采用不同的PID參數(shù)。單就Kp而言,由圖可看出:在低轉速段,曲線的斜率較陡,轉速對占空比的變化敏感,Kp取值較小,避免了超調過大和振蕩;而在高轉速段,曲線上升非常平緩,Kp取較大值,以提高響應速度。同樣地,為取得較好的性能,Ki、Kd在不同的轉速段也應取不同的值。在本系統(tǒng)中共分為三段。
4 系統(tǒng)測試
本系統(tǒng)已進行了多次臺架試驗。試驗中,被控對象選用國產500牛推力的某型渦噴發(fā)動機,原始數(shù)據(jù)利用運行于PC機平臺上的ECU V1.0通過串行口獲得。
4.1 檢測軟件ECU V1.0
為便于系統(tǒng)調試和測試,自行開發(fā)了軟件ECU V1.0。它能將發(fā)動機各種參數(shù)實時記錄下來,以曲線方式動態(tài)地顯示出來,以便分析各個參量間的相關性,并具有發(fā)送控制命令、報警等輔助功能。圖8、圖9均由該軟件生成。

4.2 測試結果
試驗表明,在控制系統(tǒng)的作用下,發(fā)動機能很好地跟蹤轉速遙控指令。圖9給出一次由18000RPM至 23000RPM的推桿操作中指令和轉速的曲線,圖中虛線為指令,實線為速度,兩條曲線基本吻合。
微型渦噴發(fā)動機控制系統(tǒng)在我國還是一個較新的領域,筆者在此方面作了較為深入的探索。試驗中控制系統(tǒng)能可靠穩(wěn)定地工作,達到了工程樣機的水平。
參考文獻
1 羅爾斯-羅伊斯公司. 噴氣發(fā)動機中文版. 羅爾斯-羅伊斯公司技術出版物部,1992
2 高金源. 計算機控制系統(tǒng). 北京:北京航空航天大學出版社,2001
3 鄭玉全. 微型搶占式實時操作系統(tǒng)的設計與實現(xiàn). 單片機與嵌入式系統(tǒng),2004(1)
4 王幸之.單片機應用系統(tǒng)抗干擾技術.北京: 北京航空航天大學出版社,2000
5 吳琪華. 航空發(fā)動機自動控制. 西安:西北工業(yè)大學出版社,1985