
介紹
電機(jī)在現(xiàn)代生活中扮演著重要角色。出于對(duì)安全、成本及效率的考慮,工程師——尤其是混合電動(dòng)力汽車(chē)(HEV)工程師——往往希望在特定的真實(shí)環(huán)境下通過(guò)仿真電機(jī)模型對(duì)電機(jī)控制器進(jìn)行測(cè)試。
由于在經(jīng)濟(jì)及環(huán)境等方面展現(xiàn)出的優(yōu)勢(shì),HEV受到了廣泛的關(guān)注,而電機(jī)正是HEV的核心部件。尤其是考慮到HEV的電機(jī)及電力電子器件體積大, 成本高; 在讓控制器去控制這些實(shí)際的部件前, 先用硬件在環(huán)仿真的方法來(lái)測(cè)試和驗(yàn)證控制器的性能是非常必要的.
本文討論基于FPGA而設(shè)計(jì)的高速HIL仿真器來(lái)實(shí)現(xiàn)電機(jī)控制器測(cè)試。下圖為HIL測(cè)試系統(tǒng)。
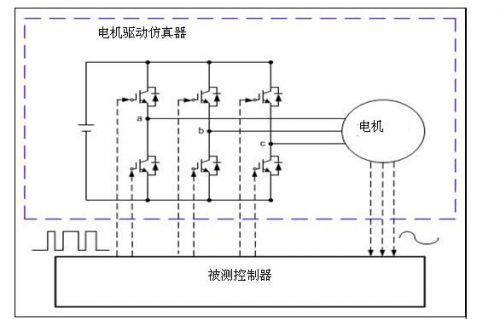
電機(jī)驅(qū)動(dòng)仿真器包括DC電壓源、逆變器橋路以及電機(jī)。我們支持永磁同步電機(jī)(PMSM)及無(wú)刷DC電機(jī)(BLDC).
為何需要基于FPGA的硬件在環(huán)仿真器
現(xiàn)代電機(jī)驅(qū)動(dòng)系統(tǒng)通常由脈沖寬度調(diào)制(PWM)所驅(qū)動(dòng)。下圖描述了PWM的基本概念。
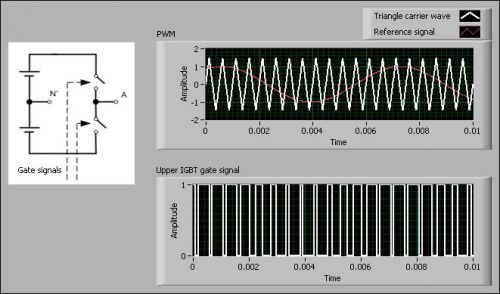
電機(jī)控制器將參考波形與三角載波相比較,從而確定門(mén)控制信號(hào)的狀態(tài)。
當(dāng) 時(shí),上面一個(gè)電力電子器件的門(mén)極控制信號(hào)為高, 下面的器件的控制信號(hào)為低
時(shí),上面一個(gè)電力電子器件的門(mén)極控制信號(hào)為高, 下面的器件的控制信號(hào)為低
當(dāng) 時(shí),上面一個(gè)電力電子器件的門(mén)極控制信號(hào)為低, 下面的器件的控制信號(hào)為高
時(shí),上面一個(gè)電力電子器件的門(mén)極控制信號(hào)為低, 下面的器件的控制信號(hào)為高
準(zhǔn)確檢測(cè)門(mén)信號(hào)的開(kāi)關(guān)時(shí)刻對(duì)仿真器正確產(chǎn)生仿真信號(hào)來(lái)說(shuō)非常重要。否則仿真器可能產(chǎn)生抖動(dòng)、非特征諧波等不準(zhǔn)確結(jié)果,甚至變得不穩(wěn)定。下圖為PMSM電機(jī)驅(qū)動(dòng)的電流波形仿真結(jié)果。
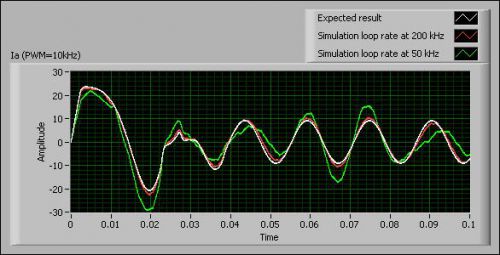
PWM頻率為10 kHz。可以看到,50 kHz的仿真循環(huán)速率還不足以讓仿真器及時(shí)地檢測(cè)出開(kāi)關(guān)時(shí)刻
因此不能獲得精確結(jié)果。檢測(cè)結(jié)果中包含了不想要的諧波分量,使結(jié)果與期望值偏差很大。而在200 kHz的循環(huán)速率下,檢測(cè)結(jié)果就好了很多。
為了獲得精確結(jié)果,仿真器的采樣間隔必須比控制器的PWM周期小很多。如此高循環(huán)速率的應(yīng)用使基于FPGA的方案成為理想選擇。我們的定點(diǎn)PMSM模型及定點(diǎn)BLDC模型均能在40個(gè)FPGA時(shí)鐘周期內(nèi)完成一次更新運(yùn)算。
提示:有時(shí),期望仿真循環(huán)速率可能超過(guò)模擬了I/O所能夠達(dá)到的速率。一般此時(shí)無(wú)需更新模擬I/O(扭矩輸入、電流輸出等)來(lái)匹配仿真循環(huán)率,用戶可使用多頻編程來(lái)保持?jǐn)?shù)字I/O及仿真循環(huán)處于高速率,從而用于門(mén)信號(hào)開(kāi)關(guān)時(shí)刻的精確檢測(cè),而將模擬I/O設(shè)置于另一個(gè)循環(huán)狀態(tài),之后再通過(guò)FIFO在兩個(gè)不同頻率的循環(huán)間傳輸數(shù)據(jù)。
設(shè)計(jì)的前提假設(shè)
a. 電力電子器件的理想開(kāi)關(guān)模型
將電力電子器件建模為理想開(kāi)關(guān),當(dāng)門(mén)信號(hào)為真(高)時(shí),開(kāi)關(guān)為理想的短路電路。當(dāng)門(mén)信號(hào)為假(低)時(shí),開(kāi)關(guān)為理想的開(kāi)路電路。理想開(kāi)關(guān)模型非常適用于系統(tǒng)級(jí)仿真,此時(shí)我們不關(guān)心電力電子器件的寄生效應(yīng)。此外,理想開(kāi)關(guān)模型可大幅提升仿真速度。
對(duì)于電力電子器件的熱損失,可以計(jì)算其等效電阻,并將此電阻值計(jì)入電機(jī)的總電阻。
b. 積分方法
電機(jī)的數(shù)學(xué)模型是一組微分方程。當(dāng)在FPGA上仿真電機(jī)驅(qū)動(dòng)模型時(shí),實(shí)際上是在FPGA上對(duì)這些微分方程進(jìn)行積分。由于期望的積分步長(zhǎng)非常的小,僅為幾微秒的量級(jí)。
所以用戶可選擇最簡(jiǎn)單的積分方法,如歐拉方法,此方法適用于小步長(zhǎng)情況。
方案流程圖
下圖為創(chuàng)建基于FPGA電機(jī)仿真器的流程圖。
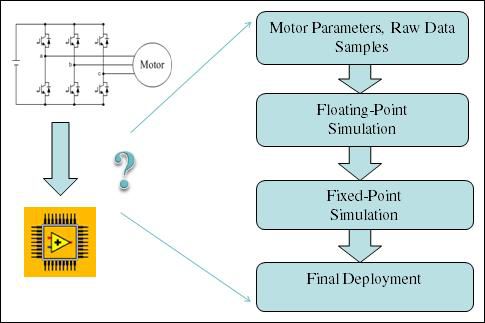
第一步,用戶需要采集電機(jī)參數(shù)及原始數(shù)據(jù)。通過(guò)浮點(diǎn)仿真來(lái)驗(yàn)證仿真結(jié)果是否與測(cè)量數(shù)據(jù)相符。然后采用定點(diǎn)仿真來(lái)驗(yàn)證定點(diǎn)電機(jī)模型,確定精度是否達(dá)到要求、輸出結(jié)果是否令人滿意。完成定點(diǎn)模型驗(yàn)證后,就可以進(jìn)入最終部署階段。
應(yīng)對(duì)定點(diǎn)實(shí)現(xiàn)的挑戰(zhàn)
不同的電機(jī)通常具有相差較大的功率級(jí),然而定點(diǎn)數(shù)據(jù)類(lèi)型的范圍及精度是確定的,因此選擇合適的定點(diǎn)數(shù)據(jù)類(lèi)型非常重要,否則量化誤差就會(huì)快速積累從而導(dǎo)致錯(cuò)誤的仿真結(jié)果。用戶往往難以調(diào)整或校準(zhǔn)所有的定點(diǎn)數(shù)配置來(lái)適應(yīng)自己的情況。美國(guó)國(guó)家儀器公司提供以下方案來(lái)應(yīng)對(duì)這些挑戰(zhàn)。
a. 歸一化系統(tǒng)
除了使用工程單位外,電氣工程師還使用歸一化系統(tǒng)。歸一化系統(tǒng)將電流、電壓、速率等統(tǒng)一度量,使其操作點(diǎn)的歸一化值接近1.0。歸一化系統(tǒng)的這一特點(diǎn)非常適用于定點(diǎn)實(shí)現(xiàn)。通過(guò)歸一化可將定點(diǎn)電機(jī)模型用于各類(lèi)不同電機(jī)。
使用歸一化系統(tǒng)以后,用戶可為定點(diǎn)電機(jī)模型選擇確定的預(yù)定義定點(diǎn)數(shù)據(jù)類(lèi)型。下表為部分選擇列表。
|
|
字長(zhǎng) |
整數(shù)字長(zhǎng) |
數(shù)據(jù)范圍 |
|
歸一化電流 |
32 |
5 |
[-16, 16) |
|
歸一化速率 |
32 |
4 |
[-8, 8) |
|
歸一化電壓 |
24 |
4 |
[-8, 8) |
以上選擇都為極端情況(如電流過(guò)載等)留有余量。
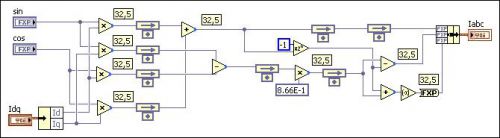
確定以上參數(shù)的定點(diǎn)數(shù)據(jù)類(lèi)型可幫助用戶選擇內(nèi)部計(jì)算單位的定點(diǎn)配置,如下圖中Idq至Iabc的轉(zhuǎn)換。
b. 將部分計(jì)算量移至主機(jī)
電機(jī)仿真過(guò)程涉及一些除法操作,如 。此類(lèi)操作不涉及電流等時(shí)變參數(shù),因此用戶無(wú)需每步都更新該值。用戶可將這個(gè)除法操作移至主機(jī)來(lái)運(yùn)算,避免在FPGA中進(jìn)行除法運(yùn)算的棘手問(wèn)題。
。此類(lèi)操作不涉及電流等時(shí)變參數(shù),因此用戶無(wú)需每步都更新該值。用戶可將這個(gè)除法操作移至主機(jī)來(lái)運(yùn)算,避免在FPGA中進(jìn)行除法運(yùn)算的棘手問(wèn)題。
因此針對(duì)定點(diǎn)電機(jī)模型共需兩個(gè)VI。主機(jī)VI處理一些除法操作及參數(shù)轉(zhuǎn)換工作;FPGA VI用于仿真目標(biāo)的定點(diǎn)電機(jī)模型。
案例
下圖顯示了定點(diǎn)PMSM模型在加速及減速過(guò)程中的速率及電磁轉(zhuǎn)矩。
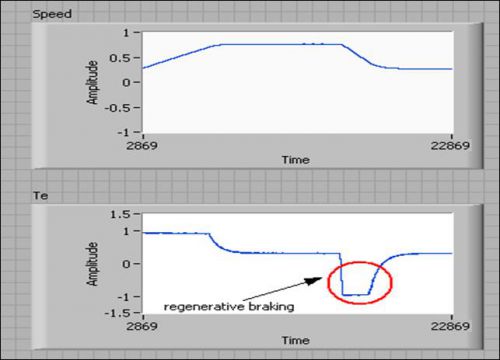
用戶可在上圖中觀察到減速階段的再生制動(dòng)效應(yīng)。當(dāng)電機(jī)將能量回饋給DC電源(電池)時(shí),電磁轉(zhuǎn)矩為負(fù)值。
結(jié)論
本文介紹了基于LabVIEW FPGA的電機(jī)驅(qū)動(dòng)仿真器,可以用來(lái)幫助用戶通過(guò)NI-RIO硬件創(chuàng)建高速電機(jī)驅(qū)動(dòng)HIL測(cè)試。