
低壓智能電動(dòng)機(jī)保護(hù)器的可靠性設(shè)計(jì)
朱煜銘 陸偉青 朱文灝
摘要: 針對(duì)低壓智能電動(dòng)機(jī)保護(hù)器在實(shí)際使用中遇到的各種電磁兼容問題,根據(jù)微處理器系統(tǒng)的特點(diǎn)從硬件和軟件兩個(gè)方面,提出了抗干擾方法,獲得了良好的EMC性能。關(guān)鍵詞
Abstract:
Key words :
摘要:針對(duì)低壓智能電動(dòng)機(jī)保護(hù)器在實(shí)際使用中遇到的各種電磁兼容問題,根據(jù)微處理器系統(tǒng)的特點(diǎn)從硬件和軟件兩個(gè)方面,提出了抗干擾方法,獲得了良好的EMC性能。
關(guān)鍵詞:微處理器;EMC電磁兼容性;軟件;硬件;抗干擾
1、引言
電動(dòng)機(jī)作為一種拖動(dòng)機(jī)械因具有結(jié)構(gòu)簡單、價(jià)格低廉、使用維護(hù)方便等優(yōu)點(diǎn),在國民經(jīng)濟(jì)各個(gè)方面被廣泛采用。在當(dāng)代,隨著電子技術(shù)的發(fā)展和智能電動(dòng)機(jī)保護(hù)器技術(shù)的成熟而普及率越來越高。
智能電動(dòng)機(jī)保護(hù)器采用了微處理器技術(shù),不僅解決了傳統(tǒng)的熱繼整定粗糙、不能實(shí)現(xiàn)斷相保護(hù),重復(fù)性差、測(cè)量參數(shù)誤差大的缺點(diǎn)。保護(hù)器通過電流來判斷斷相故障,軟件模擬熱積累過程的方法來實(shí)現(xiàn)過載保護(hù)等方法保證了電機(jī)的可靠運(yùn)行,而微處理器強(qiáng)大的擴(kuò)展性包括開關(guān)量輸入、繼電器輸出,4~20mA變送輸出、RS485通訊等很好的滿足了控制系統(tǒng)的“四遙”功能。
電動(dòng)機(jī)保護(hù)器提高了電動(dòng)機(jī)運(yùn)行的可靠性和系統(tǒng)智能化要求,因此保護(hù)器的可靠運(yùn)行起著舉足輕重的作用,同時(shí)也對(duì)保護(hù)器抗外界干擾提出了比較現(xiàn)實(shí)的要求。下面就從硬件和軟件兩個(gè)方面提出可靠性設(shè)計(jì)。
2、硬件可靠性設(shè)計(jì)
2.1 微處理的選擇
采用Freescale公司的高性能處理器MC9S08AW60。MC9S08AW60是Freescale公司一款基于S08內(nèi)核的高度節(jié)能型處理器,是第一款認(rèn)可用于汽車市場(chǎng)的微控制器。可應(yīng)用在家電、汽車、工業(yè)控制等場(chǎng)合,具有業(yè)內(nèi)最佳的EMC性能。
2.2電源端濾波處理
利用電磁原理進(jìn)行硬件電路濾波是提高保護(hù)器EMC的有效方法。線路如下圖,經(jīng)熱敏電阻t、壓敏電阻RV1、電感L1、L2、差模電容C1、共模電感L3、共模電容C2、C3組成的兩級(jí)濾波處理,很好的隔離了由于電源端的輸入和輸出干擾。PTC熱敏電阻器的主要用于過流過熱保護(hù),直接串在負(fù)載電路中,在線路出現(xiàn)異常狀況時(shí),能夠自動(dòng)限制過電流或阻斷電流,當(dāng)故障排除后又恢復(fù)原態(tài),俗稱“萬次保險(xiǎn)絲”。根據(jù)線路的最大工作電流來確定選擇。壓敏電阻主要用于吸收各種操作浪涌及感應(yīng)雷浪涌過壓保護(hù),以防止這類過電壓干擾或損壞各種電路元件。根據(jù)設(shè)計(jì)經(jīng)受的浪涌電壓按照最大允許使用電壓和通流容量來選擇。其中,L1、L2、C1為抑制差模干擾,L3、C2、C3為抑制共模干擾。L1、L2鐵芯應(yīng)選擇不易飽和的材料及M-F特性優(yōu)良的材料。按照IEC-380安全技術(shù)指標(biāo)推薦,圖中元件參數(shù)的選擇范圍為:C1=0.1~2uF;C2、C3=2.2~33uF;L3為幾個(gè)或幾十毫亨,隨工作電流不同而取不同的參數(shù)值。
按照下面公式計(jì)算C2、C3的容量:
Ii=2πfCyU
式中:Ii───允許的交流漏電流
f───電源頻率;
U───電源供電電壓;

圖1 電源端處理圖

圖2電源端未濾波處理的實(shí)驗(yàn)效果 圖3電源端濾波處理后的實(shí)驗(yàn)效果
上圖為電源端是否使用濾波器,使用瑞士TRANSIENT 2000電磁兼容測(cè)試儀1000V 100KHZ 0.75mS條件EFT群脈沖實(shí)驗(yàn),從TEXtronix TDS1012B捕抓到的信號(hào)比較,未使用濾波處理的電源輸出端產(chǎn)生了尖峰脈沖,會(huì)導(dǎo)致微處理器復(fù)位,甚至死機(jī)。
2.3信號(hào)端處理
諧波和電磁輻射干擾會(huì)導(dǎo)致保護(hù)器誤動(dòng)作,使電氣儀表計(jì)量不準(zhǔn)確,甚至無法正常工作。在電動(dòng)機(jī)控制回路中產(chǎn)生該類干擾源為變頻器和現(xiàn)場(chǎng)對(duì)講機(jī)。解決的方法有:一是信號(hào)輸入線膠合,膠合的雙膠線能降低共模干擾,由于改變了導(dǎo)線電磁感應(yīng)的磁通方向,使其感應(yīng)互相抵消。二是內(nèi)部線路處理。如下圖,采用雙差分輸入的差動(dòng)放大器,具有很高的共模抑制比。在輸入回路中接RC濾波器、信號(hào)的輸入和輸出端使用專用器件、降低輸入輸出阻抗、可靠接地和合理的屏蔽等措施。

圖4 信號(hào)處理電路
2.4保護(hù)輸出端處理
輸入輸出端采用光電隔離的方法,也是可以消除共模干擾,同時(shí)在保護(hù)繼電器的的輸出端并接壓敏電阻,有效的提高了繼電器的壽命,也降低了由于外部接觸器動(dòng)作對(duì)內(nèi)部的干擾。考慮到客戶使用控制電壓的不確定性和接觸器線圈容量,確認(rèn)使用MYG14D821。
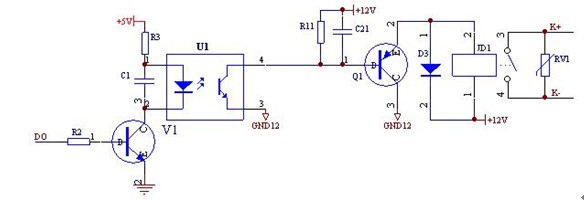
圖5 保護(hù)輸出電路
2.5外部存儲(chǔ)技術(shù)和看門狗保護(hù)電路
使用外置存儲(chǔ)芯片X25043,SPI接口。微處理器內(nèi)置SPI控制模塊,方便的與該芯片接口,外部存儲(chǔ)技術(shù)保證了運(yùn)行狀態(tài)和事件的記錄。低電壓復(fù)位和外部看門狗提高了保護(hù)器的可靠性。
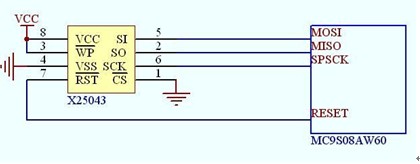
圖6 外置存儲(chǔ)器和看門狗電路
2.6主體與顯示單元通過RS485連接
考慮到使用環(huán)境的特殊性和要求的多樣性,主體與顯示單元之間連接也采用RS485 Modbus-Rtu協(xié)議連接,提高了顯示與控制的可靠性。
3、軟件可靠性設(shè)計(jì)
3.1實(shí)時(shí)多任務(wù)的調(diào)度
保護(hù)器起著保護(hù)電動(dòng)機(jī)的重任,對(duì)它的要求是既不能誤動(dòng),也不能拒動(dòng),而且必須快速。實(shí)時(shí)多任務(wù)的調(diào)度實(shí)際是通過時(shí)間片的輪換實(shí)現(xiàn)宏觀上的多任務(wù)效果。對(duì)于保護(hù)器而言,存在著三個(gè)重要的任務(wù),等間隔的交流采樣,根據(jù)算法得到穩(wěn)態(tài)與暫態(tài)電量數(shù)據(jù);根據(jù)得到的數(shù)據(jù)判斷故障,故障計(jì)時(shí)、清零和脫扣輸出;人機(jī)交互界面。下圖以一個(gè)周波T=20mS,32點(diǎn)采樣為例(考慮到快速除法),32次采樣總時(shí)間為3.2mS,數(shù)據(jù)計(jì)算時(shí)間為9.72mS, 計(jì)時(shí)0.36mS,則人機(jī)交互的時(shí)間為6.72mS。這樣的任務(wù)調(diào)度即滿足了保護(hù)實(shí)時(shí)性要求,又較快的響應(yīng)了參數(shù)設(shè)置。

圖7 任務(wù)執(zhí)行關(guān)系
3.2交流采樣、數(shù)字濾波
對(duì)于交流正弦信號(hào),一個(gè)周期的電壓有效值為
U=
根據(jù)電工原理中連續(xù)周期交流信號(hào)的有效值的定義,將連續(xù)信號(hào)離散化,用數(shù)值積分代替連續(xù)積分,從而得到有效值與采樣值之間的關(guān)系。離散化得到
U≈
同理
I=
在對(duì)信號(hào)多次采樣的基礎(chǔ)上,通過軟件算法提取最逼近真值的數(shù)據(jù)。這種算法計(jì)算連續(xù)的周期的交流信號(hào),精度高,抗波形畸變能力強(qiáng)。在使用這種算法時(shí),也可同時(shí)采用連續(xù)平均值法、中值算法等數(shù)字濾波,提高保護(hù)器的抗干擾能力。 3.3軟件陷阱
程序是固化在微處理器的存儲(chǔ)器中,由編譯器統(tǒng)一安排,但設(shè)計(jì)時(shí),設(shè)計(jì)人員考慮到產(chǎn)品的擴(kuò)展性,一般留有余量,也因此總有些存儲(chǔ)空間會(huì)未被使用。當(dāng)微處理器的PC指針因?yàn)楦蓴_被錯(cuò)置時(shí),系統(tǒng)就會(huì)出錯(cuò)。軟件陷阱就是在不用的存儲(chǔ)空間、中斷入口、子程序后加入強(qiáng)制跳轉(zhuǎn)指令,讓出錯(cuò)的PC指針恢復(fù)正常。
方法是: NOP
NOP
JSR MAIN
4、結(jié)束語
本文針對(duì)低壓智能電動(dòng)機(jī)保護(hù)器在實(shí)際使用中遇到的各種電磁兼容問題,根據(jù)微處理器系統(tǒng)的特點(diǎn)從硬件和軟件兩個(gè)方面,提出了抗干擾方法,獲得了良好的EMC性能。
參考文獻(xiàn):
1、低壓電動(dòng)機(jī)保護(hù)器行業(yè)標(biāo)準(zhǔn) JB/T 10736-2007
2、任致程,周中電力電測(cè)數(shù)字儀表原理與應(yīng)用指南北京:中國電力出版社,2007
3、Freescale,MC9S08AW系列單片機(jī)數(shù)據(jù)手冊(cè)[EB/OL],2006。
4、陳偉華 電磁兼容實(shí)用手冊(cè) 機(jī)械工業(yè)出版社 1998.8
5、周志敏 周紀(jì)海 開關(guān)電源實(shí)用技術(shù)設(shè)計(jì)與應(yīng)用 人民郵電出版社
6、錢振宇 開關(guān)電源的電磁兼容性設(shè)計(jì)與測(cè)試 電子工業(yè)出版社
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。