
摘 要: 設(shè)計(jì)了一種基于ti" title="ti">title="DSP" title="DSP">DSP">DSP的無刷直流電動(dòng)機(jī)" title="電動(dòng)機(jī)">電動(dòng)機(jī)控制系統(tǒng),對(duì)其中的轉(zhuǎn)子位置檢測(cè)電路、驅(qū)動(dòng)電路、保護(hù)電路以及驅(qū)動(dòng)器網(wǎng)絡(luò)控制等內(nèi)容進(jìn)行了詳細(xì)的討論,并給出了相應(yīng)的硬件電路。該設(shè)計(jì)方案電路簡(jiǎn)單、可靠性強(qiáng),具有較高的應(yīng)用價(jià)值。
關(guān)鍵詞: 直流無刷電動(dòng)機(jī) DSP 網(wǎng)絡(luò)伺服控制器
眾所周知,直流電機(jī)具有最優(yōu)越的調(diào)速性能,主要表現(xiàn)在調(diào)速方便(可無級(jí)調(diào)速)、調(diào)速范圍寬、低速性能好(啟動(dòng)轉(zhuǎn)矩大、啟動(dòng)電流小)、運(yùn)行平穩(wěn)、噪音低、效率高等方面。目前無刷直流電機(jī)已廣泛應(yīng)用于數(shù)控機(jī)床的進(jìn)給驅(qū)動(dòng)、機(jī)器人的伺服驅(qū)動(dòng)以及新一代家用電器的變速驅(qū)動(dòng)中。
為進(jìn)一步提高控制系統(tǒng)的綜合性能,就無刷直流電機(jī)控制系統(tǒng)的控制器而言,近幾年國(guó)外一些大公司紛紛推出較MCU性能更加優(yōu)越的DSP(數(shù)字信號(hào)處理器)單片電機(jī)控制器,如ADI公司的ADMC3xx系列,TI公司的TMS320C24系列及Motorola公司的DSP56F8xx系列。它們都是將一個(gè)以DSP為基礎(chǔ)的內(nèi)核,配以電機(jī)控制所需的外圍功能電路,集成在單一芯片內(nèi),使價(jià)格大大降低且體積縮小、結(jié)構(gòu)緊湊、使用便捷、可靠性提高。其最大速度可達(dá)20~40MIPS,指令執(zhí)行時(shí)間或完成一次動(dòng)作的時(shí)間僅為幾十納秒,和普通的MCU相比,運(yùn)算及處理能力增強(qiáng)10~50倍,確保了系統(tǒng)有更優(yōu)越的控制性能。
1 系統(tǒng)原理概述
在本文設(shè)計(jì)的無刷直流電動(dòng)機(jī)控制系統(tǒng)中,采用TI公司的TMS320LF240x" title="TMS320LF240x">TMS320LF240x芯片作為控制器。TMS320LF240x芯片作為DSP控制器24x系列的新成員,是TMS320C2000平臺(tái)下的一種定點(diǎn)DSP芯片。從結(jié)構(gòu)設(shè)計(jì)上講,240x系列DSP提供了低成本、低消耗、高性能的處理能力,對(duì)電機(jī)的數(shù)字化控制作用非常突出。
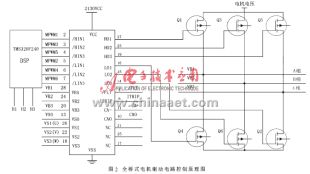
在圖1所示的基于TMS320LF240x的無刷直流電動(dòng)機(jī)控制系統(tǒng)中,采用TMS320LF240 DSP作為控制器,處理采集到的數(shù)據(jù)和發(fā)送控制命令。TMS320LF240控制器首先通過三個(gè)I/O端口捕捉直流電機(jī)上的霍爾元件H1、H2、H3的高速脈沖信號(hào),檢測(cè)轉(zhuǎn)子的轉(zhuǎn)動(dòng)位置,并根據(jù)轉(zhuǎn)子的位置發(fā)出相應(yīng)的控制字來改變PWM信號(hào)的當(dāng)前值,從而改變直流電機(jī)驅(qū)動(dòng)電路(全橋控制電路MOSFET)中功率管的導(dǎo)通順序,實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)速和轉(zhuǎn)動(dòng)方向的控制。電機(jī)的碼盤信號(hào)A、B通過DSP控制器的CAP1、CAP2端口進(jìn)行捕捉。捕捉到的數(shù)據(jù)存放到寄存器中,通過比較捕捉到的A、B兩相脈沖值可以確定當(dāng)前電機(jī)的正反轉(zhuǎn)狀態(tài)以及轉(zhuǎn)速。在系統(tǒng)的運(yùn)行過程中,驅(qū)動(dòng)保護(hù)電路會(huì)檢測(cè)當(dāng)前系統(tǒng)的運(yùn)行狀態(tài)。如果系統(tǒng)中出現(xiàn)過流或者欠壓情況,PWM信號(hào)驅(qū)動(dòng)器IR2130會(huì)啟動(dòng)內(nèi)部保護(hù)電路,鎖住后繼PWM信號(hào)的輸出,同時(shí)通過FAULT引腳拉低DSP控制器的PDPINT引腳電壓,啟動(dòng)DSP控制器的電源驅(qū)動(dòng)保護(hù)。這時(shí)所有的EV模塊輸出引腳將被硬件置為高阻態(tài),實(shí)現(xiàn)對(duì)控制系統(tǒng)的保護(hù)。該系統(tǒng)中設(shè)計(jì)的保護(hù)電路主要用于保護(hù)DSP控制器和電機(jī)的驅(qū)動(dòng)電路。

下面主要介紹系統(tǒng)的轉(zhuǎn)子位置檢測(cè)電路、驅(qū)動(dòng)電路、系統(tǒng)保護(hù)電路等。
2 轉(zhuǎn)子位置檢測(cè)電路
2.1 檢測(cè)電路應(yīng)用原理
控制無刷直流電動(dòng)機(jī)時(shí),DSP控制器主要是根據(jù)轉(zhuǎn)子當(dāng)前的轉(zhuǎn)動(dòng)位置,發(fā)出相應(yīng)的控制字,通過改變PWM脈沖信號(hào)的占空比來實(shí)現(xiàn)對(duì)電機(jī)的控制。無刷直流電動(dòng)機(jī)的轉(zhuǎn)子位置是由位置傳感器檢測(cè)出來的。在本設(shè)計(jì)方案中,采用了三個(gè)光電式位置傳感器(霍爾元件)。這種傳感器是利用光電效應(yīng)制成的,由跟隨電動(dòng)機(jī)轉(zhuǎn)子一起旋轉(zhuǎn)的遮光板和固定不動(dòng)的光源及光電管等部件組成。遮光板開有180°左右電角度的縫隙,且縫隙的數(shù)目等于無刷直流電動(dòng)機(jī)轉(zhuǎn)子磁極的極對(duì)數(shù)。當(dāng)縫隙對(duì)著光電晶體管時(shí),光源射到光電晶體管上,產(chǎn)生“亮電流”輸出。其它光電晶體管因遮光板擋住光線,只有“暗電流”輸出。在“亮電流”作用下,三相繞組中一相繞組有電流導(dǎo)通,其余兩相繞組不工作。遮光板隨轉(zhuǎn)子的轉(zhuǎn)動(dòng)而輪流輸出“亮電流”或“暗電流”的信號(hào),以此來檢測(cè)轉(zhuǎn)子磁極位置,控制電動(dòng)機(jī)定子三相繞組輪流導(dǎo)通,使該三相繞組按一定順序通電,保證了無刷直流電動(dòng)機(jī)正常運(yùn)行。
隨著電機(jī)轉(zhuǎn)子的旋轉(zhuǎn),光電管間歇接收從光源發(fā)出的光,不斷導(dǎo)通和截止,從而產(chǎn)生一系列“0”、“1”信號(hào)。這些脈沖信號(hào)通過I/O口傳輸給DSP,DSP讀取霍爾元件的狀態(tài)值,確定轉(zhuǎn)子當(dāng)前的位置,通過改變PWM信號(hào)輸出的高有效或低有效來控制驅(qū)動(dòng)電路,改變MOSFET管的導(dǎo)通順序,很好地實(shí)現(xiàn)電機(jī)換相的控制;同時(shí)改變PWM信號(hào)占空比,來調(diào)節(jié)電機(jī)的轉(zhuǎn)速。電動(dòng)機(jī)驅(qū)動(dòng)電路控制橋功率管的導(dǎo)通順序?yàn)镼1Q2、Q2Q3、Q3Q4、Q4Q5、 Q5Q6、Q6Q1,為兩兩通電方式。電機(jī)轉(zhuǎn)子每轉(zhuǎn)一圈,霍爾元件H1、H2、H3會(huì)出現(xiàn)六種狀態(tài),DSP對(duì)每一種狀態(tài)發(fā)出相應(yīng)的控制字,改變電機(jī)的通電相序,實(shí)現(xiàn)電機(jī)的連續(xù)運(yùn)行。
電機(jī)驅(qū)動(dòng)電路控制原理圖和電機(jī)正轉(zhuǎn)換相表如圖2和表1所示。

2.2 霍爾元件信號(hào)處理
電動(dòng)機(jī)上的霍爾元件信號(hào)發(fā)生時(shí)序如圖3所示。
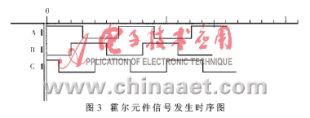
直流電機(jī)產(chǎn)生的霍爾元件信號(hào)通常高低電平相互覆蓋。而對(duì)電機(jī)驅(qū)動(dòng)橋路的控制需要根據(jù)檢測(cè)到的三個(gè)霍爾元件的每一次跳變,來觸發(fā)控制器進(jìn)入中斷響應(yīng),同時(shí)還要記錄霍爾元件的狀態(tài)。因此在設(shè)計(jì)中對(duì)三個(gè)霍爾元件做兩步處理:首先把三個(gè)霍爾元件的信號(hào)接到TMS320LF240的三個(gè)I/O引腳上,記錄當(dāng)前的狀態(tài);然后把霍爾元件信號(hào)作為三路輸入接到CPLD的I/O口,通過編程實(shí)現(xiàn)一路連續(xù)的窄脈沖輸出,接到TMS320LF240的CAP3引腳上。每一個(gè)脈沖觸發(fā)一次中斷,控制驅(qū)動(dòng)橋路的導(dǎo)通順序,并根據(jù)當(dāng)前的霍爾元件狀態(tài)信息對(duì)電機(jī)的轉(zhuǎn)速和正反轉(zhuǎn)進(jìn)行控制。
3 驅(qū)動(dòng)電路
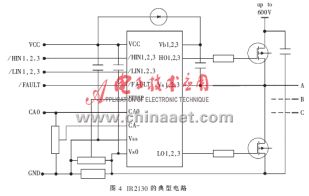
電機(jī)控制的驅(qū)動(dòng)器采用IR2130芯片。IR2130/IR2132(J)(S)是一種高電壓、高速度的功率MOSFET和 IGBT驅(qū)動(dòng)器,工作電壓為10~20V,分別有三個(gè)獨(dú)立的高端和低端輸出通道。邏輯輸入與CMOS或LSTTL輸出兼容,最小可以達(dá)到2.5V邏輯電壓。外圍電路中的參考地運(yùn)算放大器通過外部的電流檢測(cè)電位器來提供全橋電路電流的模擬反饋值,如果超出設(shè)定或調(diào)整的參考電流值,IR2130驅(qū)動(dòng)器的內(nèi)部電流保護(hù)電路就啟動(dòng)關(guān)斷輸出通道,實(shí)現(xiàn)電流保護(hù)的作用。IR2130驅(qū)動(dòng)器反映高脈沖電流緩沖器的狀態(tài),傳輸延遲和高頻放大器相匹配,浮動(dòng)通道能夠用來驅(qū)動(dòng)N溝道功率MOSFET和IGBT,最高電壓可達(dá)到600V。
IR2130芯片可同時(shí)控制六個(gè)大功率管的導(dǎo)通和關(guān)斷順序,通過輸出HO1,2,3分別控制三相全橋驅(qū)動(dòng)電路的上半橋Q1、Q3、Q5的導(dǎo)通關(guān)斷,而IR2130的輸出LO1,2,3分別控制三相全橋驅(qū)動(dòng)電路的下半橋Q4、Q6、Q2的導(dǎo)通關(guān)斷,從而達(dá)到控制電機(jī)轉(zhuǎn)速和正反轉(zhuǎn)的目的。
IR2130芯片內(nèi)部有電流比較電路,可以進(jìn)行電機(jī)比較電流的設(shè)定。設(shè)定值可以作為軟件保護(hù)電路的參考值,這樣可以使電路能夠適用于對(duì)不同功率的電機(jī)的控制。IR2130的典型電路如圖4所示。
4 系統(tǒng)保護(hù)電路
在無刷直流電動(dòng)機(jī)控制系統(tǒng)中,保護(hù)電路占據(jù)著很重要的地位,主要作用是保護(hù)控制系統(tǒng)的核心部件DSP免受高電壓、過電流的沖擊,同時(shí)也保護(hù)電機(jī)的驅(qū)動(dòng)電路免受損壞。整個(gè)系統(tǒng)的保護(hù)電路主要由三部分組成:電源隔離電路、信號(hào)隔離電路、驅(qū)動(dòng)保護(hù)電路。
電源隔離電路選用內(nèi)部帶有隔離變壓器的電壓模塊,把電機(jī)驅(qū)動(dòng)電壓和控制部分的電壓隔離開,分成兩套供電系統(tǒng):5V供電系統(tǒng)和24V供電系統(tǒng)。這樣當(dāng)驅(qū)動(dòng)電路部分發(fā)生異常情況時(shí),不會(huì)從電源部分影響到控制電路,實(shí)現(xiàn)控制電路的保護(hù)作用。
信號(hào)隔離電路主要是把控制電路和驅(qū)動(dòng)電路之間的控制和驅(qū)動(dòng)信號(hào)通過光電隔離器進(jìn)行信號(hào)隔離,實(shí)現(xiàn)不同電壓之間的信號(hào)傳輸。由于本系統(tǒng)中的PWM脈沖信號(hào)的輸出頻率比較高,為了避免信號(hào)損失和失真,這里采用6N137光電隔離器。
系統(tǒng)的驅(qū)動(dòng)電路保護(hù)作用主要是由IR2130驅(qū)動(dòng)器來實(shí)現(xiàn)的。IR2130驅(qū)動(dòng)器的保護(hù)電路主要有兩部分:自保護(hù)電路和過電流欠電壓保護(hù)電路。
自保護(hù)電路如圖5所示。外圍電路中的參考地運(yùn)算放大器通過引腳VSO的設(shè)定值與流入CA-引腳的電流在反饋電阻上產(chǎn)生的電壓相比較,如果超出設(shè)定或調(diào)整的VSO參考值,IR2130驅(qū)動(dòng)器的內(nèi)部電流保護(hù)電路啟動(dòng)關(guān)斷輸出通道,實(shí)現(xiàn)電流保護(hù)的作用。IR2130芯片內(nèi)部也有硬件保護(hù)電路。如果負(fù)載或驅(qū)動(dòng)電路出現(xiàn)過電流或欠電壓的情況,IR2130驅(qū)動(dòng)器的FAULT引腳會(huì)輸出制動(dòng)信號(hào),通常這個(gè)輸出信號(hào)接到DSP的PDPINT引腳上,拉低PDPINT引腳的輸入電平,關(guān)斷DSP的所有輸出并置為高阻狀態(tài),實(shí)現(xiàn)整個(gè)控制電路的保護(hù)作用。

5 網(wǎng)絡(luò)化接口設(shè)計(jì)原理
為了適應(yīng)網(wǎng)絡(luò)發(fā)展的要求,必然要求微處理器控制設(shè)備提供各種網(wǎng)絡(luò)通信接口。傳統(tǒng)的單片機(jī)對(duì)于網(wǎng)絡(luò)支持不足,而新一代的微處理器已經(jīng)開始內(nèi)嵌網(wǎng)絡(luò)接口,除了支持TCP/IP協(xié)議外,有的還支持USB、CAN、BLUETOOTH等通信接口,同時(shí)也提供相應(yīng)的通信組網(wǎng)協(xié)議軟件和物理層驅(qū)動(dòng)軟件。
通過網(wǎng)絡(luò)控制無刷直流電動(dòng)機(jī)的運(yùn)動(dòng)可以說是該控制系統(tǒng)的一個(gè)特色。通常的無刷直流電動(dòng)機(jī)的控制系統(tǒng)都是單機(jī)控制或采用雙控制器進(jìn)行控制,很少通過網(wǎng)絡(luò)來控制。本控制系統(tǒng)采用RS485通訊接口進(jìn)行網(wǎng)絡(luò)化數(shù)據(jù)傳輸。主要的網(wǎng)絡(luò)傳輸示意圖如圖6所示。上位機(jī)或PC機(jī)為每個(gè)控制模塊軟件分配地址,發(fā)送數(shù)據(jù)給每個(gè)模塊,而主機(jī)在發(fā)送數(shù)據(jù)時(shí)主要是通過分配給每個(gè)模塊的地址識(shí)別發(fā)送對(duì)象。網(wǎng)絡(luò)系統(tǒng)上電后,在進(jìn)行網(wǎng)絡(luò)初始化之前,除了主機(jī)的組地址和地址可以確定外,所有驅(qū)動(dòng)器模塊的組地址和地址都是0xFF,表示該驅(qū)動(dòng)器模塊只在0xFF這個(gè)全體組內(nèi),且地址沒有初始化。由硬件的連接方式?jīng)Q定,此時(shí)網(wǎng)絡(luò)的下一個(gè)驅(qū)動(dòng)器模塊處于等待網(wǎng)絡(luò)初始化指令狀態(tài),主機(jī)應(yīng)當(dāng)發(fā)送一個(gè)地址分配指令對(duì)該驅(qū)動(dòng)器模塊進(jìn)行地址分配。一旦該驅(qū)動(dòng)器模塊地址分配成功,它便通過硬件向下一個(gè)驅(qū)動(dòng)器模塊傳遞信息,表示自身已經(jīng)分配完畢。然后主機(jī)的下一個(gè)地址分配指令將作用于下一個(gè)驅(qū)動(dòng)器模塊。這個(gè)過程將一直持續(xù)下去,直到主機(jī)在發(fā)送地址分配指令后收不到分配成功的反饋信息為止,此時(shí)表示沒有需要分配的驅(qū)動(dòng)器模塊了。至此網(wǎng)絡(luò)初始化完畢。在網(wǎng)絡(luò)已經(jīng)建立好的情況下,主機(jī)可以通過發(fā)送網(wǎng)絡(luò)復(fù)位指令,使所有驅(qū)動(dòng)器模塊復(fù)位為剛上電的狀態(tài),然后再次進(jìn)行初始化,即提供了網(wǎng)絡(luò)“熱”重建能力。

無刷直流電機(jī)配以高性能高速實(shí)時(shí)數(shù)字控制器構(gòu)成的調(diào)速裝置,整個(gè)系統(tǒng)控制相對(duì)簡(jiǎn)單、成本低、轉(zhuǎn)速平穩(wěn)、噪音低,特別適合在家用電器產(chǎn)品中應(yīng)用。同時(shí),也可推廣到其它工業(yè)應(yīng)用領(lǐng)域,如機(jī)床、機(jī)器人和電梯驅(qū)動(dòng)等。
參考文獻(xiàn)
1 王季秩,曲家騏.執(zhí)行電動(dòng)機(jī).北京:機(jī)械工業(yè)出版社,1999
2 史 乃.電機(jī)學(xué).北京:機(jī)械工業(yè)出版社,1998
3 高速數(shù)字信號(hào)處理器原理與應(yīng)用.北京聞亭科技發(fā)展有限公司,1998
4 IR2130/IR2132(J)(S) Data Sheet,NO.PD60019-N