
摘 要: 主要對(duì)通用化遙測(cè)前端設(shè)備的組成、功能及性能指標(biāo)進(jìn)行了描述,并對(duì)通用化遙測(cè)前端設(shè)備的關(guān)鍵技術(shù)和實(shí)現(xiàn)途徑進(jìn)行了重點(diǎn)論述。
關(guān)鍵詞: 遙測(cè)前端設(shè)備 遙測(cè)信號(hào)模擬" title="信號(hào)模擬">信號(hào)模擬源 遙測(cè)信號(hào)" title="遙測(cè)信號(hào)">遙測(cè)信號(hào)匹配器 遙測(cè)信號(hào)解調(diào)器" title="信號(hào)解調(diào)器">信號(hào)解調(diào)器 副載波(PSK)信號(hào)
遙測(cè)前端設(shè)備是地面綜合測(cè)試系統(tǒng)與衛(wèi)星的主要信息接口之一,負(fù)責(zé)下行遙測(cè)數(shù)據(jù)采集,同時(shí)與總控測(cè)試設(shè)備(OCOE)的主測(cè)試計(jì)算機(jī)(MTP)和專用測(cè)試設(shè)備(SCOE)計(jì)算機(jī)通過(guò)網(wǎng)絡(luò)相連接,構(gòu)成衛(wèi)星地面綜合測(cè)試系統(tǒng)網(wǎng)絡(luò),完成整星的綜合測(cè)試。
遙測(cè)前端設(shè)備是衛(wèi)星地面綜合測(cè)試系統(tǒng)的重要組成部分,它由遙測(cè)信號(hào)模擬源、遙測(cè)信號(hào)匹配器、遙測(cè)信號(hào)解調(diào)器組成。要實(shí)現(xiàn)遙測(cè)前端設(shè)備的通用化,關(guān)鍵在于對(duì)遙測(cè)前端設(shè)備的副載波頻率、幀格式、碼速率、調(diào)制體制等參數(shù)的設(shè)置,達(dá)到同一套遙測(cè)前端設(shè)備能適應(yīng)不同衛(wèi)星的測(cè)試。
1遙測(cè)前端設(shè)備的功能和性能
1.1設(shè)備的主要功能
遙測(cè)前端設(shè)備的三個(gè)組成部分分別完成以下功能:
a.遙測(cè)信號(hào)模擬源可以輸出衛(wèi)星遙測(cè)模擬信號(hào),提供給遙測(cè)信號(hào)解調(diào)器自檢和誤碼率測(cè)試用;
b. 完成副載波(PSK)信號(hào)功率、阻抗匹配與隔離;
c.完成對(duì)遙測(cè)遙控和數(shù)傳專用測(cè)試設(shè)備(TT&C SCOE) 或遙測(cè)信號(hào)模擬源輸出的一定范圍內(nèi)任意頻率的副載波解調(diào)和數(shù)據(jù)恢復(fù);
d. 多星兼容,具有一定的可擴(kuò)展性;
e. 可以本控或遠(yuǎn)控完成對(duì)遙測(cè)信號(hào)模擬源、遙測(cè)信號(hào)解調(diào)器工作參數(shù)、工作狀態(tài)、設(shè)備配置的控制;
f. 按衛(wèi)星的數(shù)據(jù)要求通過(guò)計(jì)算機(jī)網(wǎng)絡(luò)發(fā)送原始遙測(cè)數(shù)據(jù)組合數(shù)據(jù)幀和實(shí)時(shí)幀,具備遙測(cè)數(shù)據(jù)挑點(diǎn)處理、顯示及數(shù)據(jù)回放功能;
g. 具有設(shè)備狀態(tài)、工作參數(shù)巡檢、故障報(bào)警功能。
1.2設(shè)備的主要性能
通用遙測(cè)前端設(shè)備的主要性能指標(biāo)如下:
·副載波信號(hào)頻率覆蓋范圍:5kHz~512kHz;
·碼速率頻率覆蓋范圍:100bps~16kbps;
·調(diào)制體制:PCM/PSK;
·字長(zhǎng):8bit;
·幀長(zhǎng):4~1024字(偶數(shù));
·幀同步碼組:16、24、32bit可選。
2 遙測(cè)前端設(shè)備通用化方案設(shè)計(jì)
2.1設(shè)備組成
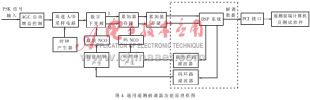
遙測(cè)前端設(shè)備的總線形式采用PCI總線,基于PCI接口的遙測(cè)前端設(shè)備組成框圖如圖1。信號(hào)模擬源和信號(hào)匹配器單獨(dú)由一個(gè)機(jī)箱組成,遙測(cè)解調(diào)器作為一塊功能卡插在遙測(cè)前端計(jì)算機(jī)的PCI插槽中,通過(guò)PCI總線與計(jì)算機(jī)進(jìn)行數(shù)據(jù)交互,遙測(cè)前端計(jì)算機(jī)的數(shù)據(jù)處理軟件完成遙測(cè)數(shù)據(jù)的采集、處理、存儲(chǔ)、顯示等功能。

2.2 遙測(cè)信號(hào)模擬源通用化設(shè)計(jì)
通用遙測(cè)模擬源主要包括:通用遙測(cè)仿真計(jì)算機(jī)、通用PSK調(diào)制器。通用遙測(cè)仿真計(jì)算機(jī)由遙測(cè)前端計(jì)算機(jī)和測(cè)試軟件組成。仿真軟件可對(duì)衛(wèi)星遙測(cè)格式、參數(shù)內(nèi)容等進(jìn)行設(shè)置,可以產(chǎn)生兩種仿真數(shù)據(jù)流,一種用于設(shè)備自檢或軟件調(diào)試,另一種用于誤碼率測(cè)試。仿真信號(hào)經(jīng)異步串行接口送通用PSK調(diào)制器進(jìn)行調(diào)制,通用PSK調(diào)制器為可設(shè)置副載波頻率和碼速率的通用調(diào)制設(shè)備。
遙測(cè)信號(hào)模擬源由遙測(cè)前端計(jì)算機(jī)、數(shù)字信號(hào)處理器、數(shù)字副載波產(chǎn)生器、碼同步產(chǎn)生器、低通濾波器和PCI接口等組成,其原理框圖如圖2所示。它采用直接數(shù)字頻率合成器(DDS)作為數(shù)字副載波產(chǎn)生器、碼同步產(chǎn)生器,通過(guò)數(shù)字信號(hào)處理器的控制和運(yùn)算,產(chǎn)生相應(yīng)的數(shù)字調(diào)制波,經(jīng)PSK數(shù)字調(diào)制產(chǎn)生PSK信號(hào)。
2.3 遙測(cè)信號(hào)匹配器通用化設(shè)計(jì)
輸入、輸出端均采用DC/DC電源供電,從而實(shí)現(xiàn)輸入信號(hào)與輸出信號(hào)的電源、地隔離,輸入信號(hào)與輸出信號(hào)之間采用變壓器進(jìn)行隔離,在變壓器的輸出端有增益可調(diào)放大電路。
遙測(cè)信號(hào)匹配器原理框圖如圖3所示。
2.4 遙測(cè)信號(hào)解調(diào)器通用化設(shè)計(jì)
2.4.1基本原理與組成
通用遙測(cè)解調(diào)器的原理框圖如圖4所示,其中時(shí)鐘產(chǎn)生器、載波NCO、碼NCO、碼時(shí)鐘產(chǎn)生、載波時(shí)鐘產(chǎn)生、數(shù)字下變頻器、相關(guān)累加器等均在FPGA中設(shè)計(jì)完成;載波環(huán)路濾波器" title="環(huán)路濾波器">環(huán)路濾波器、碼環(huán)路濾波器、數(shù)據(jù)解調(diào)、位同步脈沖產(chǎn)生等均由DSP完成。

2.4.2高速A/D" title="A/D">A/D采集電路
為了實(shí)現(xiàn)解調(diào)器的技術(shù)指標(biāo),選擇AD公司的AD9220芯片作為產(chǎn)品中的高速A/D轉(zhuǎn)換器,它提供12位分辨率、10MHz的采集速率、單一+5V電源供電、由外部接入基準(zhǔn)電壓。高速A/D轉(zhuǎn)換器的技術(shù)指標(biāo)如下:
·A/D轉(zhuǎn)換分辨率:12位;
·A/D轉(zhuǎn)換速率:10MHz;
·模擬量傳輸及轉(zhuǎn)換為數(shù)字量的總誤差:優(yōu)于0.3%FSR;
·模擬信號(hào)頻帶寬度:400kHz。
2.4.3 數(shù)字下變頻器
數(shù)字下變頻器主要作用是將A/D采樣所得到的中頻信號(hào)進(jìn)行下變頻處理,從而去除中頻,得到基帶信號(hào)。數(shù)字下變頻器的主要原理是:利用載波數(shù)控振蕩器產(chǎn)生與輸入中頻信號(hào)頻率相同的正弦和余弦本地載波信號(hào),與輸入信號(hào)進(jìn)行乘法運(yùn)算,然后對(duì)運(yùn)算結(jié)果做低通濾波,即可完成對(duì)中頻信號(hào)下變頻操作。以上過(guò)程均為數(shù)字化處理。所以,本振信號(hào)、乘法模塊、低通濾波器均采用數(shù)字化設(shè)計(jì)。
2.4.4 碼的捕獲
利用本地碼元與接收碼元的相關(guān)值進(jìn)行判決是否捕獲,如果連續(xù)8次取得的相關(guān)值都大于所設(shè)置的門限,則判定為捕獲,之后轉(zhuǎn)入跟蹤狀態(tài);如果任何一次低于門限值則重新進(jìn)行捕獲。
2.4.5 副載波跟蹤
利用自動(dòng)頻率控制進(jìn)行載波環(huán)路跟蹤。根據(jù)所取得的當(dāng)前路的相關(guān)值,利用自動(dòng)頻率控制算法提取載波誤差信號(hào),把得到的誤差信號(hào)送入環(huán)路濾波器,環(huán)路濾波器輸出的調(diào)整量送入載波NCO,形成閉環(huán),載波NCO根據(jù)濾波器的輸出適時(shí)調(diào)整,直至本地載波與接收載波的穩(wěn)態(tài)誤差在誤差允許的范圍內(nèi)為止。
2.4.6 碼跟蹤
利用碼的相關(guān)特性進(jìn)行碼環(huán)路跟蹤。根據(jù)所取得的超前路和滯后路的相關(guān)值,利用碼的S鑒相算法提取碼誤差信號(hào),把得到的誤差信號(hào)送入環(huán)路濾波器,環(huán)路濾波器輸出的調(diào)整量送入碼NCO,形成閉環(huán),碼NCO根據(jù)濾波器的輸出適時(shí)調(diào)整,直至本地碼元與接收碼元的穩(wěn)態(tài)誤差在誤差允許的范圍內(nèi)為止。
2.4.7 數(shù)據(jù)解調(diào)
利用相位旋轉(zhuǎn)進(jìn)行數(shù)據(jù)解調(diào)。由于載波和碼都有很小的穩(wěn)態(tài)誤差存在,不能完全消除,為了正確解調(diào)數(shù)據(jù)減少誤碼,采用軟件Costas環(huán)算法進(jìn)行相位旋轉(zhuǎn)解調(diào)。
3 設(shè)備的實(shí)現(xiàn)和特點(diǎn)
為了達(dá)到遙測(cè)前端設(shè)備通用化、小型化設(shè)計(jì)的目的,在設(shè)備研制過(guò)程中采用高速數(shù)字信號(hào)處理芯片(DSP),將遙測(cè)模擬信號(hào)進(jìn)行數(shù)字化,采用自適應(yīng)濾波器的方法,大大提高處理遙測(cè)信號(hào)副載頻和碼速率的范圍;利用EDA工具,采用復(fù)雜的可編程邏輯器件(CPLD)、現(xiàn)場(chǎng)可編程門陣列(FPGA)和直接頻率合成器(DDS)等器件,通過(guò)硬件描述語(yǔ)言設(shè)計(jì)芯片來(lái)實(shí)現(xiàn)系統(tǒng)功能,完成系統(tǒng)級(jí)仿真和綜合,不僅可以實(shí)現(xiàn)多種數(shù)字邏輯功能,而且大大減少芯片數(shù)量從而縮小系統(tǒng)體積、能耗,同時(shí)提高系統(tǒng)的性能及可靠性,可以真正實(shí)現(xiàn)遙測(cè)設(shè)備的小型化設(shè)計(jì);利用硬件軟件化技術(shù)對(duì)軟件進(jìn)行通用化設(shè)計(jì),實(shí)現(xiàn)設(shè)備的通用化設(shè)計(jì);采用PCI總線形式,可以將解調(diào)器直接插入計(jì)算機(jī)的PCI插槽中,使解調(diào)器小型化。
目前,通用的遙測(cè)前端設(shè)備樣機(jī)已研制成功,通過(guò)遙測(cè)前端計(jì)算機(jī)中的上位機(jī)軟件,對(duì)副載頻、碼速率和相關(guān)格式進(jìn)行設(shè)置后,就可以實(shí)現(xiàn)遙測(cè)信號(hào)的模擬和解調(diào),實(shí)現(xiàn)遙測(cè)前端設(shè)備的通用化。本方案提出了一種新型全數(shù)字化遙測(cè)信號(hào)解調(diào)器,在技術(shù)上采用不需載波同步即可完成碼元捕獲的非相干快捕技術(shù)、碼元跟蹤的超前—滯后型非相干數(shù)字延遲鎖相環(huán)(DDLL)以及跟蹤環(huán)路的軟件化技術(shù)等。
隨著計(jì)算機(jī)技術(shù)的普及,USB接口將成為測(cè)試設(shè)備的主流。因此研制基于USB接口的通用遙測(cè)前端設(shè)備成為首選;同時(shí)隨著擴(kuò)頻等先進(jìn)技術(shù)在衛(wèi)星產(chǎn)品上的應(yīng)用,電子、通信領(lǐng)域的新技術(shù)、新思路更應(yīng)該提前應(yīng)用到地面測(cè)試設(shè)備的研制中。
參考文獻(xiàn)
1 張呤瑞,張 軍,羅志強(qiáng)編著.現(xiàn)代測(cè)控原理,北京:北京航空航天大學(xué)出版社,1995
2 陳以恩編著.無(wú)線電遙測(cè)遙控.北京:國(guó)防工業(yè)出版社,2002
3 陳以恩編著.遙測(cè)數(shù)據(jù)處理.北京:國(guó)防工業(yè)出版社,2002
4.張翰英編著.衛(wèi)星電測(cè)技術(shù).北京:宇航出版社,1999