
本設(shè)計(jì)采用傳統(tǒng)的視日運(yùn)動跟蹤法,利用Xilinx公司提供的FPGA開發(fā)環(huán)境ISE,,設(shè)計(jì)完成了基于XC3S1500開發(fā)板的太陽能自動跟蹤系統(tǒng),,以實(shí)現(xiàn)對太陽的全天候、全自動,、實(shí)時精確控制,。
1 視日運(yùn)動跟蹤法
視日運(yùn)動跟蹤法是根據(jù)地日運(yùn)行軌跡,采用赤道坐標(biāo)系或地平坐標(biāo)系描述太陽相對地球的位置,。一般在雙軸跟蹤中極軸式跟蹤采用赤道坐標(biāo)系,,高度角-方位角式跟蹤采用地平坐標(biāo)系,。
1.1 極軸式跟蹤
赤道坐標(biāo)系是人在地球以外的宇宙空間里,觀測太陽相對于地球的位置,。這時太陽位置是相對于赤道平面而言,,用赤緯角和時角這兩個坐標(biāo)表示。太陽中心與地球中心的連線,,即太陽光線在地球表面直射點(diǎn)與地球中心的連線與在赤道平面上的投影的夾角稱為太陽赤緯角,。它描述地球以一定的傾斜度繞太陽公轉(zhuǎn)而引起二者相對位置的變化。一年中,,太陽光線在地球表面上的垂直照射點(diǎn)的位置在南回歸線,、赤道和北回歸線之間往復(fù)運(yùn)動,使該直射點(diǎn)與地心連線在赤道面上的夾角也隨之重復(fù)變化,。赤緯角在一年中的變化用式(1)計(jì)算:
式中:δ為一年中第n天的赤緯角,,單位:(°);n為一年中的日期序號,單位:日,。
時角是描述地球自轉(zhuǎn)而引起的日地相對位置的變化,。地球自轉(zhuǎn)一周為360°,對應(yīng)的時間為24 h,,故每小時對應(yīng)的時角為15°,。日出、日落時間的時角最大,,正午時角為零,。計(jì)算公式如下:
式中:ω為時角,單位:(°);T為當(dāng)?shù)貢r間,,單位:h,。
根據(jù)上述方法可以計(jì)算出地球上任意地點(diǎn)和時刻的太陽的赤緯角和時角,由此可建立極軸式跟蹤,,對于太陽跟蹤系統(tǒng)來說,,采光板的一軸與地球自轉(zhuǎn)軸相平行,稱為極軸,,另外一軸與其垂直,。工作時采光板繞地球自轉(zhuǎn)軸旋轉(zhuǎn),其轉(zhuǎn)速的設(shè)定為與地球的自轉(zhuǎn)速度相同,,方向相反,。為了適應(yīng)太陽赤緯角的變化,采光板圍繞與地球自轉(zhuǎn)軸垂直的軸做俯仰運(yùn)動,。此種跟蹤方式原理簡單,,但是由于采光板的重量不通過極軸軸線,極軸支撐結(jié)構(gòu)的設(shè)計(jì)比較困難,因此本設(shè)計(jì)沒有選用極軸式跟蹤,。
1.2 地平坐標(biāo)系
地平坐標(biāo)系用高度角和方位角來描述太陽的位置,,已知太陽赤道坐標(biāo)系中的赤緯角和時角,可以通過球面三角形的變換關(guān)系得到地平坐標(biāo)系的太陽的高度角和方位角,。如圖1所示,,該天球是以觀測者為球心,任意距離為半徑的假想球,,對于天球上各點(diǎn)之間的距離,,只討論它們之間的角距而不考慮它們的線長。M和N分別為天球上的南北天極,。P點(diǎn)為觀測者的鉛垂線與天球的交點(diǎn),,P點(diǎn)的地理緯度為φ,S為太陽在天球中的位置,。S的赤緯度為δ,,觀測者的鉛垂線OP與地心與太陽連線的夾角叫做天頂角,天頂角和太陽的高度角互補(bǔ),。角A為太陽的方位角,。
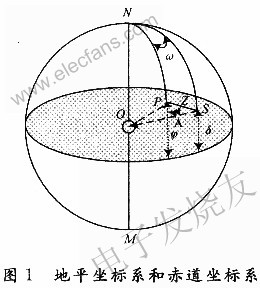
根據(jù)球面三角形的邊的余弦公式描述,即一邊的余弦等于其他兩邊余弦的乘積,,加上這兩邊正弦及其夾角余弦的乘積,,在天球的半徑不是確定值。因此描述天球上的圓弧通常用圓弧所對應(yīng)的角度來表示弧長,。在球面三角形NPS中,,三邊為弧NP、弧NS,、弧SP,,分別用角度90-φ,90-δ,,τ表示,。采用球面三角形邊的余弦公式:

高度角-方位角跟蹤又叫做地平坐標(biāo)系雙軸跟蹤系統(tǒng),采光板的方位軸垂直于地平面,,另一根軸與方位軸垂直,,稱為俯仰軸。工作時采光板根據(jù)太陽的視日運(yùn)動繞方位軸轉(zhuǎn)動改變方位角,,繞俯仰軸作俯仰運(yùn)動改變采光板的傾斜角,,從而使采光板與太陽光線垂直。這種跟蹤系統(tǒng)的特點(diǎn)是跟蹤精度高,,而且采光板裝置的重量保持在垂直軸所在的平面內(nèi),支承結(jié)構(gòu)的設(shè)計(jì)比較容易。在本文中采用了高度角一方位角跟蹤進(jìn)行設(shè)計(jì),。
2 太陽跟蹤控制系統(tǒng)設(shè)計(jì)
根據(jù)上文介紹的高度角-方位角跟蹤系統(tǒng)的整體框架,,本文基于Xilinx公司的FPGA開發(fā)板,設(shè)計(jì)了基于FPGA的太陽跟蹤系統(tǒng)的各功能模塊,。主要包括計(jì)時模塊,、太陽高度角方位角計(jì)算模塊、日出日落時間計(jì)算模塊和步進(jìn)電機(jī)脈沖控制模塊等幾部分,。
基于FPGA的太陽跟蹤控制系統(tǒng)的流程圖如圖2和圖3所示,。

首先系統(tǒng)根據(jù)計(jì)時模塊計(jì)算出當(dāng)前的時間,包括當(dāng)日在一年中的日期序數(shù)dn(單位:日)及當(dāng)前的時刻T(單位:h),,然后再根據(jù)日出日落時間計(jì)算模塊確定當(dāng)日的日出和日落時間,,以便判斷當(dāng)時時間是否在日出后日落前。在程序計(jì)算過程中,,利用太陽高度角和方位角計(jì)算模塊計(jì)算當(dāng)前太陽的位置,,并與上次計(jì)算的太陽的位置作差,分別計(jì)算出當(dāng)前跟蹤裝置高度和方位需要調(diào)整的角度及其旋轉(zhuǎn)方向,,并隨后進(jìn)入步進(jìn)電機(jī)脈沖驅(qū)動模塊,。首先調(diào)整高度角,判斷高度角差值的正負(fù),,驅(qū)動高度方向的步進(jìn)電機(jī)旋轉(zhuǎn),。高度角步進(jìn)電機(jī)停止旋轉(zhuǎn)后調(diào)整方位角。判斷方位角正負(fù),,驅(qū)動方位角步進(jìn)電機(jī)按照偏差旋轉(zhuǎn)相應(yīng)的角度,。一次跟蹤后,在一定的時間間隔T后,,系統(tǒng)再次提取時間計(jì)算,、判斷、旋轉(zhuǎn)電機(jī),。當(dāng)日落時間到時,,控制步進(jìn)電機(jī)旋轉(zhuǎn)至次日太陽升起的位置并恢復(fù)初始狀態(tài)。由此本系統(tǒng)就實(shí)現(xiàn)了對太陽的全天候,、實(shí)時跟蹤,。
3 基于FPGA的太陽跟蹤系統(tǒng)各模塊設(shè)計(jì)
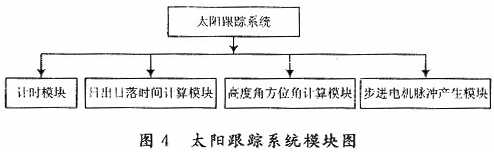
太陽跟蹤系統(tǒng)模塊圖如圖4所示。這里對基于FPGA的太陽實(shí)時跟蹤系統(tǒng)建立的計(jì)時模塊,、日出日落時間計(jì)算模塊,、高度角方位角計(jì)算模塊、步進(jìn)電機(jī)脈沖產(chǎn)生模塊的設(shè)計(jì)及結(jié)果進(jìn)行詳細(xì)的介紹,。
3.1 計(jì)時模塊
視日運(yùn)動跟蹤方法需要時間和地理緯度信息,,一般的太陽跟蹤系統(tǒng)的位置固定,,可以自行設(shè)定其地理緯度值。對于時間建立了計(jì)時模塊,,通過對時鐘進(jìn)行多級分頻輸出視日運(yùn)動跟蹤算法所需的間信息,。
3.2 太陽日出日落時間計(jì)算模塊
此模塊計(jì)算每天太陽的日出日落時間,據(jù)此保證在太陽的照射時間范圍內(nèi),,太陽跟蹤系統(tǒng)正常運(yùn)行,,在非照射時間,太陽跟蹤系統(tǒng)處于休眠狀態(tài),。太陽的日出日落時間即太陽的高度角為零的時間,。由高度角計(jì)算公式(8)和時角計(jì)算公式(9)推出太陽的日出日落時間公式(10)。

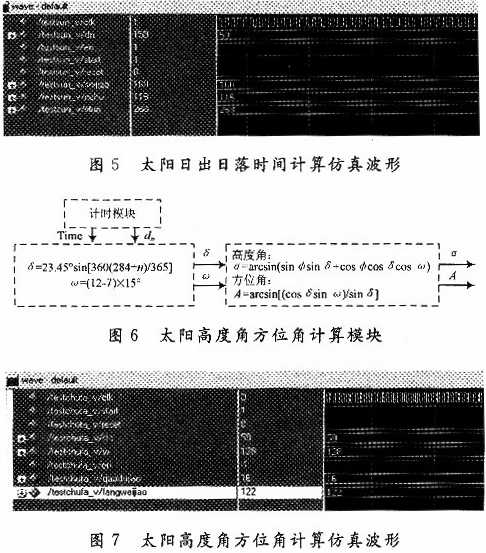
太陽日出日落時間計(jì)算模塊仿真波形如圖5所示,,輸出為10 b Q4格式,,dn為時間序號,其中richu代表日出時刻,,riluo代表日落時刻,。對太陽日出日落模塊輸出結(jié)果分析如表1所示,dn為仿真隨機(jī)選取的日期,,太陽日出日落時間只與dn有關(guān),。對該模塊輸出的10 b Q4格式的時間計(jì)算其實(shí)際的代表值,并與理論計(jì)算值做比較,,經(jīng)計(jì)算其輸出時間誤差很小,,該模塊能夠準(zhǔn)確計(jì)算出日出日落時間。
3.3 太陽高度角方位角計(jì)算模塊
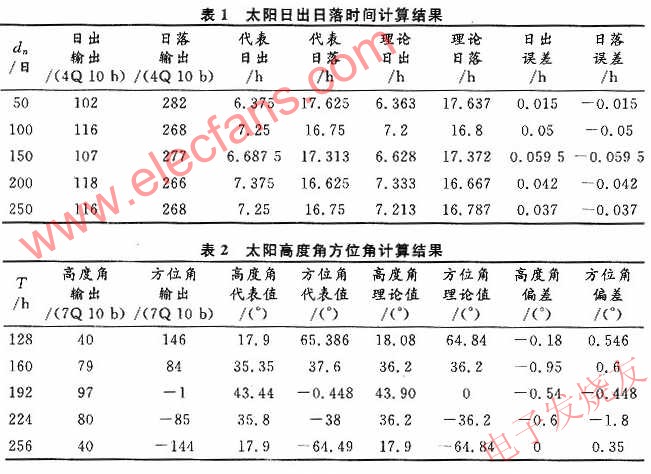
當(dāng)時間為正常光照時間時,,太陽跟蹤系統(tǒng)每隔5 min就會進(jìn)入太陽高度角方位角進(jìn)行計(jì)算,。計(jì)時模塊輸出給太陽高度角方位角模塊所需的時間信息,然后計(jì)算赤道坐標(biāo)系下的赤緯角和時角,,最后計(jì)算高度角方位角坐標(biāo)系下的高度角和方位角值,,并輸出高度角和方位角值如圖6所示,仿真波形如圖7所示,。高度角和方位角輸出均為10 b Q7格式,。
在視日運(yùn)動跟蹤算法中最重要的是準(zhǔn)確計(jì)算出當(dāng)前的太陽相對于地球的高度角和方位角,其計(jì)算準(zhǔn)確性影響太陽能裝置的能量接受效率,。表2表示在dn=100時,,不同的時間輸出的太陽的高度角及方位角值,都為10 b Q7格式,,計(jì)算其實(shí)際代表值,,并與理論值相比較,誤差很小,,說明該模塊能夠準(zhǔn)確計(jì)算出太陽的高度角和方位角,。
3.4 步進(jìn)電機(jī)脈沖控制模塊
步進(jìn)電機(jī)驅(qū)動芯片選擇了3955SB,,本設(shè)計(jì)選擇步進(jìn)電機(jī)的1/8步運(yùn)行模式,即每步可以達(dá)到0.225°,。由太陽的高度角方位角計(jì)算模塊輸出的高度角和方位角及上一次輸出的高度角方位角值,,決定高度和方位需要轉(zhuǎn)動的角度,,然后確定高度角步進(jìn)電機(jī)和方位角步進(jìn)電機(jī)的脈沖個數(shù),。根據(jù)步進(jìn)電機(jī)的步進(jìn)順序輸出16位數(shù)字信號來控制實(shí)現(xiàn)兩臺兩相步進(jìn)電機(jī)高度和方位上旋轉(zhuǎn)的角度及其旋轉(zhuǎn)方向。由實(shí)驗(yàn)結(jié)果可知,,該模塊能夠按照輸入的電機(jī)轉(zhuǎn)動的脈沖個數(shù)進(jìn)行輸出,,并在電機(jī)完成旋轉(zhuǎn)要求后能夠保持穩(wěn)定狀態(tài)。當(dāng)有新的轉(zhuǎn)動輸入后能夠在原來的狀態(tài)上輸出,。
4 結(jié)語
本文設(shè)計(jì)的太陽跟蹤系統(tǒng)適用于太陽能熱水器,、太陽能灶、太陽能電池等需要跟蹤太陽地裝置,。跟蹤控制系統(tǒng)采用了視日運(yùn)動跟蹤方法,,通過基于FPGA的高度角方位角計(jì)算模塊準(zhǔn)確計(jì)算出太陽的高度角和方位角。利用轉(zhuǎn)動精確的步進(jìn)電機(jī)驅(qū)動,,可以精確地跟蹤太陽,,有效提高太陽跟蹤裝置的太陽能吸收效率。