光電編碼器因測量精度高,在伺服用永磁同步電機位置檢測中廣泛應(yīng)用。但它有抗震性差的缺點,難以適應(yīng)惡劣工況。旋轉(zhuǎn)變壓器具有抗震性好、耐腐蝕、耐高溫和易實現(xiàn)高速位置檢測的優(yōu)點,通常在礦山、紡織用伺服系統(tǒng)、航空用電力作動系統(tǒng)等惡劣環(huán)境中應(yīng)用。
旋轉(zhuǎn)變壓器與光電編碼器不同,它是一種機電元件,需要將其輸出的模擬電壓信號轉(zhuǎn)換為數(shù)字信號才可輸入到dsp控制芯片。本文選用多摩川公司的旋轉(zhuǎn)變壓器數(shù)字轉(zhuǎn)換器(rdc)au6802n1,設(shè)計了一套旋變解碼的接口電路板。同時基于永磁電機矢量控制平臺對該接口電路進行了實驗驗證。實驗表明該設(shè)計方案確實可行,并取得了較好的位置檢測效果。
旋轉(zhuǎn)變壓器原理
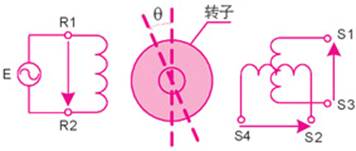
圖1 旋轉(zhuǎn)變壓器的結(jié)構(gòu)
旋轉(zhuǎn)變壓器是一種單相激勵雙相輸出無刷旋轉(zhuǎn)變壓器。如圖1所示,激磁繞組(原邊)r1-r2和兩套輸出相互正交的繞組(副邊)s4-s2、s3-s1同在定子側(cè),固定在電機定子上,轉(zhuǎn)子與電機轉(zhuǎn)子同軸安裝。當(dāng)原邊的激磁繞組流過正弦電流時,副邊輸出繞組兩端會感應(yīng)出同頻率的電勢,電勢的大小與定轉(zhuǎn)子間的相對電角度有關(guān)。
假設(shè)原邊輸入電壓為:
![]() (1)
(1)
則副邊輸出電壓滿足:
![]() (2)
(2)
![]() (3)
(3)
其中,ω為激磁電源的角頻率;us4-s2,us3-s1為兩相正交繞組(正弦繞組和余弦繞組)的輸出電壓。k為傳輸電壓比,θ為轉(zhuǎn)子位置角。
本設(shè)計旋轉(zhuǎn)變壓器選用多摩川公司的ts2640n321e64。其主要性能參數(shù)如表1所示。
au6802n1工作原理
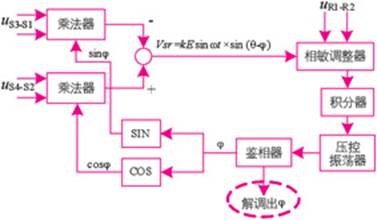
圖2 au6802n1解碼原理圖
圖2給出了au6802n1芯片解碼的原理框圖。由圖可知,au6802n1內(nèi)部是一個閉環(huán)系統(tǒng)。旋轉(zhuǎn)變壓器的四線端輸出來的信號通過調(diào)理電路進入au6802n1芯片的s1、s2、s3和s4端,經(jīng)過處理輸出到余弦和正弦乘法器上。通過后級的加減電路,得vsr=kesinωt×sin(θ-)此時根據(jù)外部激勵r1、r2端的同步相位檢測器的當(dāng)前狀態(tài),從代表了某一起始角鱟攀鄭黃魘醞劑鶻謔紙泅,使該角等于待測模擬角并跟蹤θ。當(dāng)調(diào)整到vsr=0時,即有=θ。此時可逆計數(shù)器的字狀態(tài)齙淖喚峁創(chuàng)砹誦溲蠱魘涑齙鬧嶠鉛鵲畝剖種怠8檬種悼梢運透撲慊允凈駾sp控制芯片進行處理。
au6802n1控制位設(shè)定
au6802n1可以通過設(shè)定對應(yīng)的控制位來選擇工作模式。其控制位主要分為以下幾種:
(1) 輸出模式設(shè)置:輸出模式分為三種——并行i/o口模式、spi通信模式、abz脈沖模式,可通過outmd、csb、rdb、intb四個引腳的電平來設(shè)定,詳細設(shè)定參考文獻[1]。
(2) 系統(tǒng)控制模式設(shè)置:通過設(shè)定acmd引腳電平得到。acmd=h時,系統(tǒng)選擇加速模式;反之,選擇正常模式。通常運行時設(shè)定為正常模式,當(dāng)角加速度較大時,切換到加速模式,可以獲得更高的位置檢測精度。
(3) 分辨率設(shè)置:mdsel=h時,輸出數(shù)據(jù)選擇12位;反之,輸出數(shù)據(jù)選擇10位。
(4) 極對數(shù)設(shè)置:電機的極對數(shù)設(shè)置可通過設(shè)定xsel1和xsel2引腳得到,如下表2所示。
(5) 勵磁頻率設(shè)置:勵磁信號rso頻率可通過設(shè)定fsel1和fsel2得到,如表3所示。
(6) 測試模式設(shè)置:可通過引腳test1和test2設(shè)定。通常將兩引腳都拉高至vdd,不影響正常工作。
本設(shè)計選取au6802n1工作在脈沖輸出模式和spi通信模式,數(shù)據(jù)分辨率為12位,極對數(shù)設(shè)定為1,勵磁頻率為10k,控制模式為正常模式,測試位不使能。其電路圖如圖3所示,圖中所有電阻值均為33ω。
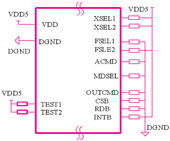
圖3 控制位設(shè)定電路圖
外圍主電路設(shè)計
為了給旋轉(zhuǎn)變壓器的勵磁繞組提供滿足要求的高品質(zhì)正弦波勵磁信號,同時使所接收到的旋轉(zhuǎn)變壓器正/余弦信號能夠滿足芯片對輸入信號幅值與相位的要求,需要加入額外的信號處理電路。
au6802n1外圍主電路包括激勵調(diào)理電路、反饋濾波調(diào)理電路和dsp接口電路。電路圖如圖4所示。
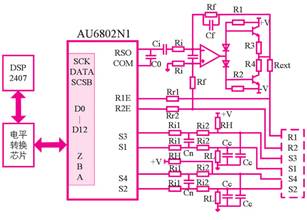
圖4 au6802n1外圍主電路電路圖
激勵調(diào)理電路設(shè)計
激勵調(diào)理電路設(shè)計激勵信號調(diào)理電路是用來給旋轉(zhuǎn)變壓器提供激勵輸入信號。au6802n1芯片的rso/com輸出的激勵信號是基于2.5v且vp-p=2v的31級內(nèi)插正弦波(vrso=1.5v~3.5v的正弦波電壓),輸出功率太小,是不能直接驅(qū)動旋轉(zhuǎn)變壓器勵磁繞組的。因此需要設(shè)計激勵調(diào)理電路,完成激勵信號放大的任務(wù)。
激勵調(diào)理電路的拓撲分為雙電源和單電源供電兩種,本文選取雙電源booster功率放大電路,可節(jié)省器件開銷。電路基本工作原理為rso/com輸出經(jīng)過隔直電容ci后,取到有效的交流信號,再經(jīng)過后級的運放和npn、pnp三極管互補推挽電路進行功率放大,最終得到正弦度較好的激磁電壓信號。為了保證系統(tǒng)的穩(wěn)定性,加入cf來補償相位。輸出勵磁信號的幅值可通過調(diào)節(jié)rext來實現(xiàn)。參數(shù)設(shè)計通常滿足以下原則:rex≤zro/10ω(zro為旋變輸入阻抗,見表1),rf≥50kω,ri×ci>500μs,rf×cf<5μs。本設(shè)計方案參數(shù)選取分別為:運放選用tl082c,±v為±15v,c0=470pf,ri=22k,ci=0.01uf,rf=100k,cf=100pf,r1=r2=3.3k,r3=r4=4.7ω,rext=10ω。
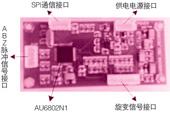
圖5 au6802n1接口電路板
反饋濾波調(diào)理電路設(shè)計
旋轉(zhuǎn)變壓器輸出的正余弦信號是不能直接送給rdc的,里面可能含有許多干擾信號,必須經(jīng)過調(diào)理濾波,滿足要求之光電編碼器因測量精度高,在伺服用永磁同步電機位置檢測中廣泛應(yīng)用。但它有抗震性差的缺點,難以適應(yīng)惡劣工況。旋轉(zhuǎn)變壓器具有抗震性好、耐腐蝕、耐高溫和易實現(xiàn)高速位置檢測的優(yōu)點,通常在礦山、紡織用伺服系統(tǒng)、航空用電力作動系統(tǒng)等惡劣環(huán)境中應(yīng)用。
旋轉(zhuǎn)變壓器與光電編碼器不同,它是一種機電元件,需要將其輸出的模擬電壓信號轉(zhuǎn)換為數(shù)字信號才可輸入到dsp控制芯片。本文選用多摩川公司的旋轉(zhuǎn)變壓器數(shù)字轉(zhuǎn)換器(rdc)au6802n1,設(shè)計了一套旋變解碼的接口電路板。同時基于永磁電機矢量控制平臺對該接口電路進行了實驗驗證。實驗表明該設(shè)計方案確實可行,并取得了較好的位置檢測效果。
旋轉(zhuǎn)變壓器原理
圖1 旋轉(zhuǎn)變壓器的結(jié)構(gòu)
旋轉(zhuǎn)變壓器是一種單相激勵雙相輸出無刷旋轉(zhuǎn)變壓器。如圖1所示,激磁繞組(原邊)r1-r2和兩套輸出相互正交的繞組(副邊)s4-s2、s3-s1同在定子側(cè),固定在電機定子上,轉(zhuǎn)子與電機轉(zhuǎn)子同軸安裝。當(dāng)原邊的激磁繞組流過正弦電流時,副邊輸出繞組兩端會感應(yīng)出同頻率的電勢,電勢的大小與定轉(zhuǎn)子間的相對電角度有關(guān)。
假設(shè)原邊輸入電壓為:
![]() (1)
(1)
則副邊輸出電壓滿足:
![]() (2)
(2)
![]() (3)
(3)
其中,ω為激磁電源的角頻率;us4-s2,us3-s1為兩相正交繞組(正弦繞組和余弦繞組)的輸出電壓。k為傳輸電壓比,θ為轉(zhuǎn)子位置角。
本設(shè)計旋轉(zhuǎn)變壓器選用多摩川公司的ts2640n321e64。其主要性能參數(shù)如表1所示。
au6802n1工作原理
圖2 au6802n1解碼原理圖
圖2給出了au6802n1芯片解碼的原理框圖。由圖可知,au6802n1內(nèi)部是一個閉環(huán)系統(tǒng)。旋轉(zhuǎn)變壓器的四線端輸出來的信號通過調(diào)理電路進入au6802n1芯片的s1、s2、s3和s4端,經(jīng)過處理輸出到余弦和正弦乘法器上。通過后級的加減電路,得vsr=kesinωt×sin(θ-)此時根據(jù)外部激勵r1、r2端的同步相位檢測器的當(dāng)前狀態(tài),從代表了某一起始角鱟攀鄭黃魘醞劑鶻謔紙泅,使該角等于待測模擬角并跟蹤θ。當(dāng)調(diào)整到vsr=0時,即有=θ。此時可逆計數(shù)器的字狀態(tài)齙淖喚峁創(chuàng)砹誦溲蠱魘涑齙鬧嶠鉛鵲畝剖種怠8檬種悼梢運透撲慊允凈駾sp控制芯片進行處理。
au6802n1控制位設(shè)定
au6802n1可以通過設(shè)定對應(yīng)的控制位來選擇工作模式。其控制位主要分為以下幾種:
(1) 輸出模式設(shè)置:輸出模式分為三種——并行i/o口模式、spi通信模式、abz脈沖模式,可通過outmd、csb、rdb、intb四個引腳的電平來設(shè)定,詳細設(shè)定參考文獻[1]。
(2) 系統(tǒng)控制模式設(shè)置:通過設(shè)定acmd引腳電平得到。acmd=h時,系統(tǒng)選擇加速模式;反之,選擇正常模式。通常運行時設(shè)定為正常模式,當(dāng)角加速度較大時,切換到加速模式,可以獲得更高的位置檢測精度。
(3) 分辨率設(shè)置:mdsel=h時,輸出數(shù)據(jù)選擇12位;反之,輸出數(shù)據(jù)選擇10位。
(4) 極對數(shù)設(shè)置:電機的極對數(shù)設(shè)置可通過設(shè)定xsel1和xsel2引腳得到,如下表2所示。
(5) 勵磁頻率設(shè)置:勵磁信號rso頻率可通過設(shè)定fsel1和fsel2得到,如表3所示。
(6) 測試模式設(shè)置:可通過引腳test1和test2設(shè)定。通常將兩引腳都拉高至vdd,不影響正常工作。
本設(shè)計選取au6802n1工作在脈沖輸出模式和spi通信模式,數(shù)據(jù)分辨率為12位,極對數(shù)設(shè)定為1,勵磁頻率為10k,控制模式為正常模式,測試位不使能。其電路圖如圖3所示,圖中所有電阻值均為33ω。
圖3 控制位設(shè)定電路圖
外圍主電路設(shè)計
為了給旋轉(zhuǎn)變壓器的勵磁繞組提供滿足要求的高品質(zhì)正弦波勵磁信號,同時使所接收到的旋轉(zhuǎn)變壓器正/余弦信號能夠滿足芯片對輸入信號幅值與相位的要求,需要加入額外的信號處理電路。
au6802n1外圍主電路包括激勵調(diào)理電路、反饋濾波調(diào)理電路和dsp接口電路。電路圖如圖4所示。
圖4 au6802n1外圍主電路電路圖
激勵調(diào)理電路設(shè)計
激勵調(diào)理電路設(shè)計激勵信號調(diào)理電路是用來給旋轉(zhuǎn)變壓器提供激勵輸入信號。au6802n1芯片的rso/com輸出的激勵信號是基于2.5v且vp-p=2v的31級內(nèi)插正弦波(vrso=1.5v~3.5v的正弦波電壓),輸出功率太小,是不能直接驅(qū)動旋轉(zhuǎn)變壓器勵磁繞組的。因此需要設(shè)計激勵調(diào)理電路,完成激勵信號放大的任務(wù)。
激勵調(diào)理電路的拓撲分為雙電源和單電源供電兩種,本文選取雙電源booster功率放大電路,可節(jié)省器件開銷。電路基本工作原理為rso/com輸出經(jīng)過隔直電容ci后,取到有效的交流信號,再經(jīng)過后級的運放和npn、pnp三極管互補推挽電路進行功率放大,最終得到正弦度較好的激磁電壓信號。為了保證系統(tǒng)的穩(wěn)定性,加入cf來補償相位。輸出勵磁信號的幅值可通過調(diào)節(jié)rext來實現(xiàn)。參數(shù)設(shè)計通常滿足以下原則:rex≤zro/10ω(zro為旋變輸入阻抗,見表1),rf≥50kω,ri×ci>500μs,rf×cf<5μs。本設(shè)計方案參數(shù)選取分別為:運放選用tl082c,±v為±15v,c0=470pf,ri=22k,ci=0.01uf,rf=100k,cf=100pf,r1=r2=3.3k,r3=r4=4.7ω,rext=10ω。
圖5 au6802n1接口電路板
反饋濾波調(diào)理電路設(shè)計
旋轉(zhuǎn)變壓器輸出的正余弦信號是不能直接送給rdc的,里面可能含有許多干擾信號,必須經(jīng)過調(diào)理濾波,滿足要求之后,才能送給rdc。反饋調(diào)理濾波電路有4個功能:設(shè)定輸入增益、抑制共模干擾、過濾外界噪音干擾、檢測s1-s4斷線故障。
輸入增益的選取原則為:根據(jù)旋變信號(s1-s4)電壓級別,將信號調(diào)整到大概為2-3倍的vp-p,才能送給au6802n1。由此可確定增益g的大小,同時g滿足如下計算公式:
![]() (4)
(4)
電阻ri1、ri2選用精度與輸出數(shù)據(jù)分辨率有關(guān)。輸出數(shù)據(jù)分辨率為10位時,電阻精度≤1%;分辨率為12位時,電阻精度≤0.25%。
電路中, 兩個電容cc的參數(shù)相同,起抑制共模干擾信號的作用;電容cn 和兩個ri1電阻構(gòu)成了低通濾波器,過濾外界噪音干擾,濾波器定時常數(shù)由外部環(huán)境決定,計算公式為:
![]() (5)
(5)
直流電源vext和電阻rbh、rbl起檢測信號線s1-s4斷線故障的作用,取值通常在小于旋變輸出阻抗范圍內(nèi)盡可能大。
結(jié)合表1、公式(4)和(5),本設(shè)計選取反饋濾波調(diào)理電路各參數(shù)為:ri1=200k/1‰,ri2=20k/1‰,cn=100pf,rh=68k,rl=20k,cc=1000pf。
旋變勵磁信號反饋給r1e、r2e時,必須串入電阻進行分壓,分壓之后的電壓不能超過au6802n1供電電源vcc。本設(shè)計取rr1=rr2=240k。此外,當(dāng)旋轉(zhuǎn)變壓器信號s1-s3和s2-s4的激勵單元和激勵旋轉(zhuǎn)變壓器的外部輸入信號r1e與r2e間有相位差,則r/d轉(zhuǎn)換器的環(huán)路增益會相應(yīng)地下降。通常相位差>10°這可以通過增加電容調(diào)節(jié)電路相位差。由表1可知,勵磁信號輸入相移<-5°,可以不加電容進行相位補償。
dsp接口電路設(shè)計
dsp接口電路為轉(zhuǎn)速數(shù)字信號提供了方便的接口。數(shù)據(jù)傳送方式分為三種:并行i/o口模式,abz脈沖模式,spi通信模式。本設(shè)計采用后兩種方式。由于au6802n1的輸出數(shù)字信號為5v電平,dsp為3.3v電平,因此中間需要加入電平轉(zhuǎn)換芯片,保證電平的匹配。
如圖5所示,為au6802n1硬件接口電路板。提供了四種接口:分別為電源接口、旋變接口、abz脈沖信號接口和spi通信接口。電源接口提供給au6902n1的供電電壓+5v和旋變勵磁供電電壓±15v,旋變信號接口提供旋變勵磁信號和接受正余弦反饋信號,同時該板兼容兩種轉(zhuǎn)速信號輸出方式:spi通信方式和abz脈沖信號方式,實際應(yīng)用時可供不同需要靈活選取,且互不沖突,易實現(xiàn)與dsp通信。
仿真與實驗研究
利用saber對au6802n1外圍主電路電路圖進行仿真,激磁調(diào)理電路仿真結(jié)果如圖6所示。將硬件電路板應(yīng)用在五對極永磁同步電機驅(qū)動系統(tǒng)中,此時試驗中給定旋變勵磁信號為10khz,當(dāng)電機工作在5000rpm時,測試結(jié)果為:圖7為au6802n1接收到的旋變正弦信號和余弦信號波形圖。圖8為au6802n1 以脈沖接口工作模式輸出給dsp控制器后,輸出的實際轉(zhuǎn)子位置波形圖。由此可見,該硬件電路及其參數(shù)設(shè)計正確可行。
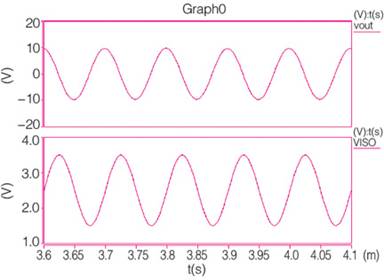
圖6 激勵調(diào)理電路仿真波形
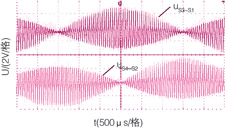
圖7 旋變正余弦信號波形
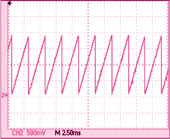
圖8 轉(zhuǎn)子位置波形圖
結(jié)語
基于多摩川公司的au6802n1所設(shè)計的旋轉(zhuǎn)變壓器信號接口電路簡單可靠,信號輸出模式靈活,與dsp數(shù)字信號處理器之間接口方便。通過仿真和實驗可見,該接口電路輸出的位置信號波形品質(zhì)好,無毛刺并具備很強抗干擾能力,可實現(xiàn)位置檢測,并具有較高的精度,因此本文設(shè)計的au6802n1硬件接口電路及其參數(shù)正確可行。這在高可靠性和高速運行的交流伺服系統(tǒng)中,具有很高的應(yīng)用價值
