
O 引言
傾角傳感器是測量關(guān)于水平傾斜角的裝置,傾角變化測量儀器是許多工業(yè)應(yīng)用設(shè)備需要具備的一個組成部分,包括測量設(shè)備、衛(wèi)星天線穩(wěn)定系統(tǒng)、工廠機床、運動安全監(jiān)視器和汽車輪位對準(zhǔn)裝置等。準(zhǔn)確地測量傾角的變化,有利于這些設(shè)備更加穩(wěn)定的工作及避免事故發(fā)生。現(xiàn)在采用的傾角測量儀大多數(shù)體積較大,信號采集比較慢,測量精度不高,誤差較大,需要做大量的溫度補償和校準(zhǔn)工作。這些缺點制約著工業(yè)設(shè)備性能的提高,也加大了工程的工作量。
ADISl6209是ADI公司新推出的一款精密的微電子機械系統(tǒng)(MEMS)傾斜計,提供小于O.1°線性傾斜誤差的全補償直接角度輸出,它使用出廠時安裝的校正系數(shù)動態(tài)地檢測系統(tǒng)環(huán)境并且補償直接數(shù)字角度輸出以便解決電壓、溫度、角度和其他參數(shù)變化引起的誤差,減少了產(chǎn)品設(shè)計時間、減低成本和復(fù)雜性。
本文詳細(xì)地介紹ADISl6209的功能特性和使用方法,并使用Luminary公司的LM3S8962 Cortex-M3微處理器與之組合設(shè)計一個傾角測量系統(tǒng)。最后對測量結(jié)果進(jìn)行分析。
1 ADISl6209功能與使用方法
ADISl6209的是一種高精度、數(shù)字化傾角測量儀和雙軸加速度測量儀,可以在單軸(±180°),雙軸(±90°)等兩種模式下運作。標(biāo)準(zhǔn)電源電壓(3.3 V)和串行外設(shè)接口(SPI)設(shè)計最簡單,集成方便。一個簡單的內(nèi)部寄存器結(jié)構(gòu)處理所有的輸出數(shù)據(jù)和配置功能。這包括訪問以下輸出數(shù)據(jù):校準(zhǔn)加速度、準(zhǔn)確傾斜角度、電源、內(nèi)部溫度、輔助模擬和數(shù)字輸入信號、診斷錯誤標(biāo)志和可編程報警條件。
ADISl6209采用9.2 mm×9.2 mm×3.9 mmLGA封裝,可工作在-40~+125℃,能連接使用標(biāo)準(zhǔn)RoHS標(biāo)準(zhǔn)的回流焊工藝,廣泛應(yīng)用于醫(yī)療儀器、測量設(shè)備、工廠機床、機器人、慣性測量單元、導(dǎo)航控制等領(lǐng)域。
1.1 ADISl6209的功能
如圖l所示,分別是ADISl6209的功能圖、安裝示意圖與引腳圖。由圖1(a)可知,ADISl6209主要由兩軸MEMS加速度計、溫度傳感器、1個模/數(shù)轉(zhuǎn)換模塊(ADC)、1個數(shù)/模轉(zhuǎn)換模塊(DAC)和報警模塊(ALARMS)組成。傳感器感知外界信號后,信號調(diào)理并轉(zhuǎn)換,經(jīng)過信號處理后,將得到的數(shù)據(jù)結(jié)果存入輸出寄存器。通過SPI總線,外部SPI主控器件向ADISl6209發(fā)送控制指令或者讀取。ADISl6209內(nèi)部設(shè)置有控制寄存器,寄存器都有默認(rèn)的值,通過對控制寄存器的修改寫操作,可以改變采樣頻率,改變平均濾波參數(shù)等多個方面的控制效果。每個采樣周期結(jié)束后,傳感器測量結(jié)果存放至輸出寄存器,并且DIO1引腳向器件外產(chǎn)生一個脈沖,表示一組新的完整的測量數(shù)據(jù)已經(jīng)采集準(zhǔn)備好,可供外部SPI主控器件讀取。
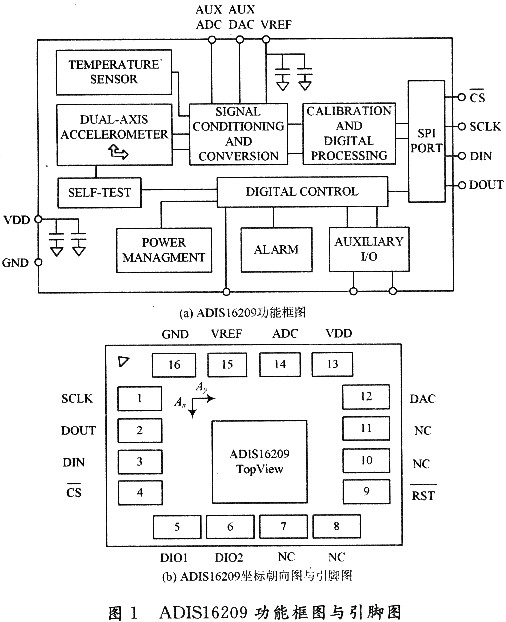
圖1(b)是ADISl6209坐標(biāo)朝向圖,傳感器測量的Ax與Ay兩個方向上的加速度分量。第1,2,3,4引腳是傳感器的SPI接口,第9引腳RST是傳感器的復(fù)位引腳。
1.2 ADISl6209使用方法
1.2.1 ADISl6209硬件連接
ADISl63209的SPI接口與各種微處理器SPI主控制器件接線如圖2所示。
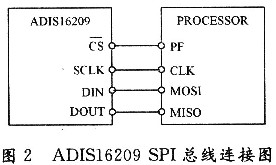
SPI總線的時鐘頻率最高可以達(dá)到2.5 MHz。但ADISl6209的采樣頻率對SPI時鐘一定的要求:當(dāng)采樣頻率大于等于546 SPS時,SPI的時鐘頻率最高可以采用2.5 MHz。當(dāng)采樣頻率小于546 SPS時,SPI的時鐘頻率應(yīng)不大于1 MHz,建議采用1 MHz。
1.2.2 ADISl6209數(shù)據(jù)讀寫與數(shù)據(jù)處理
通過SPI總線,可以對ADISl6209進(jìn)行讀寫操作。可以根據(jù)自己的要求設(shè)置控制寄存器的值達(dá)到控制效果,也可以使用寄存器的默認(rèn)設(shè)置。控制指令由1位的讀寫控制位,1位空位,6位寄存器地址位和8位的數(shù)據(jù)位組成。向ADISl6209寫控制指令時,要將指令的最高位置1,例如,要將采樣頻率設(shè)置為2 731 SPS,也就是采樣頻率寄存器的值設(shè)置為0x0001,那么寫指令就應(yīng)該如下:先寫寄存器低地址0x36,數(shù)據(jù)為0x0l,再寫高地址0x37,數(shù)據(jù)為0x00,所以指令為0xB6018700。對其他的控制寄存器的修改也可按照這樣的方式修改。
讀取ADISl6209輸出的數(shù)據(jù)與寫控制指令稍有區(qū)別,讀取每個寄存器的值要分為2個16位的時序。第1個16位時序向ADISl6209寫入讀取命令和寄存器地址。第2個16位時序?qū)?yīng)寄存器內(nèi)容發(fā)送至DOUT數(shù)據(jù)線上,微控制器才可以得到正確的數(shù)據(jù)。如要讀取x軸加速度寄存器的值(X_ACC),那么第1個16位時序DIN=0x0400,第2個時序XACCL_OUT(x軸加速度值)將被發(fā)送到DOUT數(shù)據(jù)線上,SPI主機此時讀到的數(shù)據(jù)才是上一個16位讀指令發(fā)出的需要的指令。
從SPI總線上讀取到的傳感器數(shù)據(jù)是二進(jìn)制數(shù)據(jù)或者二進(jìn)制補碼形式的數(shù)據(jù)。需要對其進(jìn)行一定的解讀才可以得到實際輸出的代表的值。傳感器輸出的各個值代表的意義可詳見A13ISl6209的數(shù)據(jù)手冊中的output Data Register Format表。其中SUPPLYOUT,AUX ADC和TEMP OUT的數(shù)據(jù)格式都為二進(jìn)制數(shù)據(jù),可以使用以下公式進(jìn)行解算:

式中:VALUE代表實際的測量量的值;DATA_VAL_UE代表寄存器的值;Scale代表寄存器每個最小單位代表的實際值;n為對應(yīng)寄存器的數(shù)據(jù)位數(shù)。
XACC_OUT,YACC_OUT,XINCL_OUT和YINCL_OUT輸出的數(shù)據(jù)格式均為14位2的補碼,可以使用以下公式進(jìn)行解算:
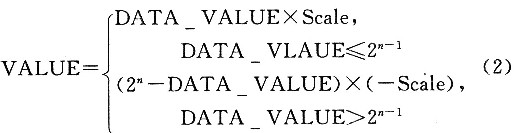
式中:DATA_VALUE為寄存器的輸出數(shù)據(jù);VALUE為轉(zhuǎn)換后實際的測量量的值;Scale為寄存器值最小值代表的最小單位;n為對應(yīng)寄存器的數(shù)據(jù)位數(shù)。
2 基于Luminary LMS8962與ADISl6209的傾角測量系統(tǒng)設(shè)計
下面介紹基于Luminary公司的LMS8962與ADISl6209的傾角測量系統(tǒng)的原理與設(shè)計。
2.1 傾角測量原理
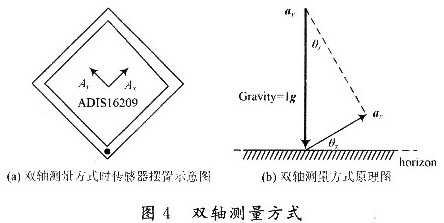
加速度計是測量物體所受除萬有引力加速度以外的加速度。將ADISl6209靜止放在水平面時,其受到的是水平面對其向上的支撐力的加速度和地球自轉(zhuǎn)的向心加速度的矢量和。而地球自轉(zhuǎn)的向心加速度很小,在測量中忽略不計。那么只要使得ADISl6209將一個加速傳感器的輸出擺置為O時,也即是將傳感器擺置如圖3(a)所示。或者兩個加速度計測得的矢量和等于水平面對其向上的支撐力的加速度,也就是重力加速度的反方向矢量,也即是將傳感器擺置如圖4(a)所示。那么就可以利用這些矢量求出傳感器與水平的傾角關(guān)系。
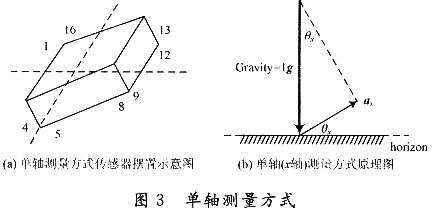
當(dāng)使用單軸測量方式時,如圖3(b)所示,可知Ay軸測得的分量為O,Ax軸測得的分量為ax,那么Ax軸與水平面的夾角:
![]()
同理可以得到使用Ay軸作單軸測量方式時,Ay軸與水平面的夾角:
![]()
當(dāng)使用雙軸測量方式時,如圖4(b)所示,傳感器Ax與Ay軸組成的平面垂直于水平面,那么重量加速度![]() 軸測得的分量為ax,那么Ax軸與水平面的夾角:
軸測得的分量為ax,那么Ax軸與水平面的夾角:
![]()
Ay軸與水平面的夾角:
![]()
2.2 硬件電路設(shè)計
本文使用Luminary公司的LMS8962與ADISl6209搭建成傾角測量系統(tǒng)。LMS8962是一款高性能的32位Cortex-M3內(nèi)核微處理器,它有豐富的片內(nèi)外設(shè),如模/數(shù)轉(zhuǎn)換(ADC),PWM,CAN和串行總線(SSI)等,功能強大,易于集成。
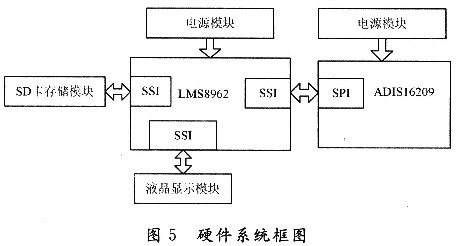
如圖5所示是由LMS8962與ADISl6209組成的傾角測量系統(tǒng)。LMS8962通過SSI總線(SSI是串行通信總線,它兼容SPI總線。)與ADISl6209進(jìn)行通信。將采集到的數(shù)據(jù)存儲到SD卡中,將解算得到的結(jié)果實時在LCD上顯示出來。
2.3 軟件設(shè)計
如圖6所示是系統(tǒng)的軟件流程圖。程序啟動進(jìn)入系統(tǒng)初始化,接下來向ADISl6209寫控制指令,以設(shè)置ADISl6209工作在需求的模式下,然后讀取返回的數(shù)據(jù)并進(jìn)行解算,最后通過存儲數(shù)據(jù)到SD卡中并在液晶模塊中顯示出來。

3 實驗結(jié)果
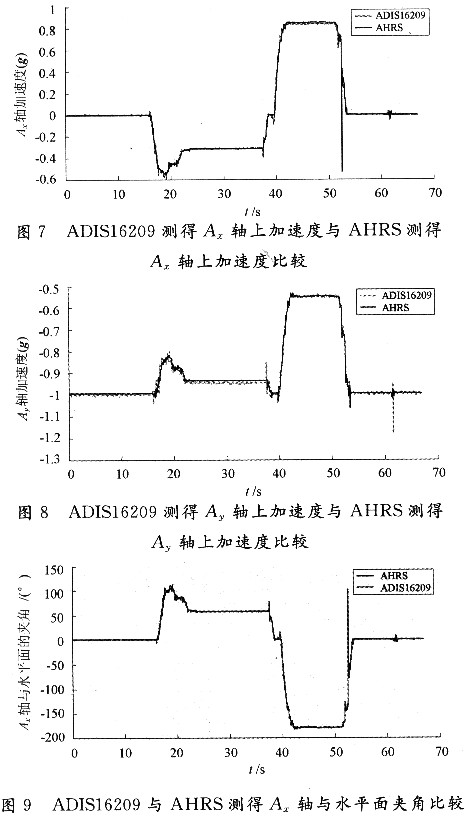
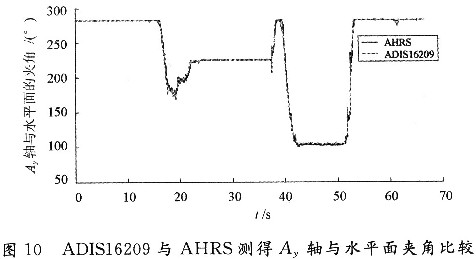
Crossbow Technology公司的AHRS500GA-226是高精度的IMU,其廣泛應(yīng)用于航空航天等高科技領(lǐng)域。實驗以AHRS輸出的結(jié)果為參考,將ADISl6209與AHRS固定于同一平臺上,使得ADISl6209的Ax與Ay軸與AHRS的Ax與Ay軸方向相一致。令它們的Ax與Ay軸組成的平面與水平面垂直,繞著Ax與Ay軸組成的平面的垂直線轉(zhuǎn)動,使Ax與Ay軸與水平面成一定的夾角。圖7~圖10是ADISl6209與AHRS輸出的數(shù)據(jù)結(jié)果的對比,圖中主要看較平穩(wěn)的數(shù)據(jù)部分,數(shù)據(jù)抖動部分是因為在切換方向,切換方向時手對傳感器有一個加速度,疊加在原來靜止?fàn)顟B(tài)下受到的力,此時測量到的不能作為準(zhǔn)確的結(jié)果。
4 結(jié)語
(1)在靜止?fàn)顟B(tài)下,ADISl6209雙軸加速度計的輸出與AHRS的輸出趨勢吻合,誤差小于O.005g,具有較高的精度。
(2)在靜止?fàn)顟B(tài)下,由ADISl6209雙軸測量方式得到的AX軸、AY軸與水平面的夾角和AHRS測得的結(jié)果趨勢吻合,誤差在1°以內(nèi),在但是ADISl6209有一定的噪聲,如果對ADISl6209輸出的加速度值進(jìn)行濾波除噪處理,可以得到更好的結(jié)果。