
O 引言
靶場測試領(lǐng)域中槍械的擊發(fā)是一個重要的環(huán)節(jié)。傳統(tǒng)的槍械擊發(fā)采用人工方式,即射擊人員聽到射擊指令后手工扣動槍械扳機進行擊發(fā),這種方式存在兩方面的問題:其一,無法保證安全性。人員操作時有可能由于疲勞或者聽錯指令進行了誤操作,則可能造成靶道內(nèi)人員安全事故,而在有些應(yīng)用場合,如防彈頭盔穿甲實驗,射擊人員必須面對防彈頭盔進行射擊,彈頭有可能反彈回來傷及射擊人員。上述兩種安全事故在國內(nèi)靶場都曾發(fā)生過。其二,隨著靶場測試技術(shù)的不斷發(fā)展,靶場測試所用的設(shè)備種類越來越多,精度也越來越高,因此,不同的測試設(shè)備如何保持一定的同步性顯得越來越重要。顯然,手工擊發(fā)槍械方式難以實現(xiàn)同步性要求。
基于以上考慮,有人提出了基于電磁效應(yīng)的控制方法,由鐵芯、線圈、銜鐵、簧片等組成,當需要控制槍械擊發(fā)時,向線圈兩端加上一定電壓,線圈中便會流經(jīng)電流,從而產(chǎn)生電磁效應(yīng),銜鐵就在電磁力的作用下克服彈簧的拉力吸緊鐵芯,以帶動扳機運動。當需要釋放扳機時,斷開線圈兩端電壓,電磁力消失,銜鐵在彈簧拉力的作用下,恢復(fù)原位釋放扳機。多次試驗后,證實該方法可行,但存在一定的弊端。如銜鐵位置的恢復(fù)依賴于彈簧的拉力,長時間使用后彈簧會產(chǎn)生疲勞現(xiàn)象,另一方面,線圈方式工作時,會有較大的沖擊電流,這會給電網(wǎng)及其他設(shè)備帶來干擾,甚至會引起關(guān)鍵設(shè)備誤觸發(fā)。
針對上述問題,設(shè)計了基于CPLD技術(shù)的槍械電磁扳機控制儀。
1 電磁扳機控制儀總體構(gòu)成
為了保證電磁扳機控制儀安全可靠地工作,必須設(shè)計一定的邏輯互鎖機構(gòu),設(shè)計中采用CPLD實現(xiàn)電路邏輯功能,步進電機作為執(zhí)行單元。
電磁扳機控制儀總體構(gòu)成如圖1所示。
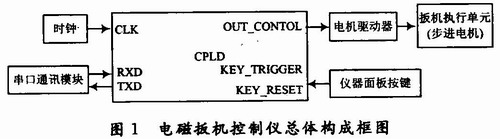
圖1中,電磁扳機控制儀由CPLD邏輯控制器、RS 232通訊模塊、電機驅(qū)動器以及步進電機構(gòu)成。其中,CPLD完成邏輯控制及串口通訊功能,電機驅(qū)動器接收邏輯指令驅(qū)動步進電機工作。應(yīng)用CPLD在線可編程技術(shù)及串口通信技術(shù),設(shè)計的控制儀具有很高的現(xiàn)場可編程功能及組網(wǎng)功能,可與其他測試設(shè)備實現(xiàn)整體測試系統(tǒng)的同步性、自動化及網(wǎng)絡(luò)化。由于電磁扳機控制儀應(yīng)用在靶場環(huán)境,因此其使用的安全性是一個關(guān)鍵指標,新設(shè)計的控制儀克服了舊儀器的諸多問題,充分考慮了電磁兼容性,現(xiàn)場可操作性以及測試安全性等因素,從設(shè)計上最大程度的保證了使用的安全性。
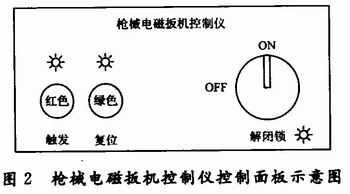
槍械電磁扳機控制儀控制面板示意圖如圖2所示。
從消除干擾確保穩(wěn)定的角度出發(fā),首先是在設(shè)計CPLD控制板時,在電源地之間加入了大量的濾波電容,在數(shù)據(jù)通道上加入光電隔離,控制信號的長線輸出采用雙絞線輸出并且接口均采用軍品航空插頭,以避免在傳播路徑中引入干擾;在步進電機執(zhí)行單元,加入電磁屏蔽盒,消除電機動作時帶來的電磁干擾。
從測試安全的角度出發(fā),在控制面板上加入了解閉鎖開關(guān),確保了系統(tǒng)的總體控制;同時在“觸發(fā)”和“復(fù)位”按鍵的邏輯上加入互鎖功能,保證操作的正確性,從而消除誤操作現(xiàn)象。
2 機械部分設(shè)計
現(xiàn)有的扳機控制儀大多采用電磁原理設(shè)計,存在的主要弊端有:彈簧長時間使用后容易產(chǎn)生疲勞現(xiàn)象;銜鐵在吸合過程中容易產(chǎn)生較大的沖擊電流,影響電網(wǎng)穩(wěn)定,而且還會影響其他測試儀器的正常工作等。針對這些問題,設(shè)計者利用電機驅(qū)動器驅(qū)動步進電機來代替原有機構(gòu),可以對扳機操作進行精確控制。
機械部分結(jié)構(gòu)圖如圖3所示。
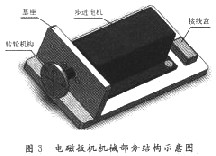
電磁扳機控制儀的機械部分主要由步進電機、基座、轉(zhuǎn)輪機構(gòu)、扳機連桿、連線盒及電磁扳機屏蔽外殼構(gòu)成。其工作過程為:步進電機接收驅(qū)動器指令進行轉(zhuǎn)動,帶動轉(zhuǎn)輪機構(gòu)轉(zhuǎn)動,步進電機旋轉(zhuǎn)一周,轉(zhuǎn)輪機構(gòu)帶動扳機實現(xiàn)一次行程,完成擊發(fā)動作。
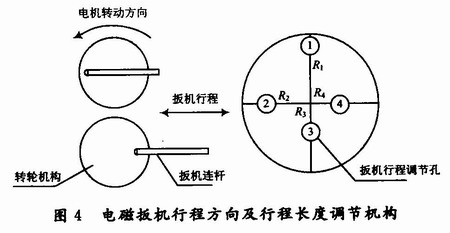
圖4為電磁扳機行程方向及行程長度調(diào)節(jié)機構(gòu)示意圖,轉(zhuǎn)輪機構(gòu)上設(shè)計有扳機行程調(diào)節(jié)孔(圖中①、②、③、④,四個調(diào)節(jié)孔距轉(zhuǎn)輪機構(gòu)中心半徑逐漸縮小R1>R2>R3>R4),扳機連桿的長度也可以調(diào)整。通過這兩個機構(gòu)的調(diào)節(jié),可以調(diào)整扳機的行程距離。
步進電機由電機驅(qū)動器接高壓進行驅(qū)動,通過CPLD控制器產(chǎn)生邏輯控制信號,實現(xiàn)扳機的控制。控制器與電機驅(qū)動器之間通過長絞線連接,測試儀與電機等干擾源距離較遠且測試人員可以通過遠距離控制槍械的擊發(fā),既保證了控制系統(tǒng)不受電磁干擾,又確保了測試人員的安全。
3 控制部分設(shè)計
3.1 CPLD邏輯控制部分
電磁扳機控制儀采用步進電機作為執(zhí)行單元,CPLD作為主控制器實現(xiàn)邏輯控制和通信功能。邏輯控制部分實現(xiàn)按鍵的判讀、鎖存,觸發(fā)和復(fù)位的互鎖以及步進電機驅(qū)動器的控制功能。
控制儀由“解閉鎖開關(guān)”作為儀器功能的總開關(guān),閉鎖時,儀器面板所有按鍵不工作;解鎖后,控制儀工作正常。電機動作由“復(fù)位”和“觸發(fā)”按鍵配合工作,當擊發(fā)允許時,按下“觸發(fā)”按鍵,槍械擊發(fā)并鎖存觸發(fā)鍵,若繼續(xù)按觸發(fā)鍵則儀器不觸發(fā);當需要再次擊發(fā)時,必須按“復(fù)位”鍵后,解除觸發(fā)鎖存,然后按下觸發(fā)按鍵觸發(fā)儀器。通過“復(fù)位”和“觸發(fā)”按鍵的相互鎖存,來確保控制儀的安全觸發(fā)。圖5為CPLD電路邏輯功能仿真時序圖。
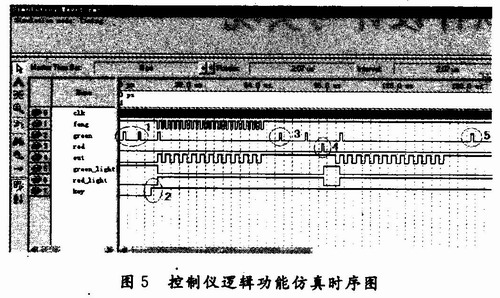
圖5中左邊Name欄定義管腳:clk為CPLD輸入時鐘1 MHz;feng為系統(tǒng)工作時的分頻時鐘;green和red分別代表“觸發(fā)”、“復(fù)位”按鍵;out為邏輯輸出端;key為解閉鎖開關(guān)。
控制儀邏輯功能見圖5。當系統(tǒng)閉鎖時(key=0),按鍵按下系統(tǒng)不工作(圖5中1);系統(tǒng)解鎖后(key=1),按“觸發(fā)”鍵,系統(tǒng)輸出控制信號;繼續(xù)按“觸發(fā)”鍵,系統(tǒng)處于互鎖保護狀態(tài),系統(tǒng)無觸發(fā)輸出(圖5中3);按“復(fù)位”鍵后,可以繼續(xù)觸發(fā),系統(tǒng)能夠正常輸出(圖5中4);重復(fù)誤操作,繼續(xù)觸發(fā),無輸出(圖5中5)。
圖5中g(shù)reen_lignt,red_light分別對應(yīng)觸發(fā)燈和復(fù)位燈。系統(tǒng)啟動且未解鎖,觸發(fā)燈亮,復(fù)位燈滅,解鎖燈滅(圖5中2);系統(tǒng)解鎖觸發(fā)后,觸發(fā)燈滅,復(fù)位燈亮,表示系統(tǒng)已經(jīng)觸發(fā),需通過復(fù)位解除保護可繼續(xù)觸發(fā)。復(fù)位后,觸發(fā)燈亮,復(fù)位燈滅,表示系統(tǒng)可以觸發(fā)。
3.2 通訊接口部分
由于目前的靶場測試系統(tǒng)由許多測試儀器組成,并且在測試過程中,數(shù)據(jù)的采集處理都要求有較高的實時性,要求電磁扳機控制儀能夠通過軟件觸發(fā)的方法來工作,而目前國內(nèi)靶場測試領(lǐng)域中測試儀器大多留有串行RS 232接口,設(shè)計者在控制電路的基礎(chǔ)上加入了串口通訊模塊實現(xiàn)系統(tǒng)組網(wǎng)。整個測試過程可以從槍械擊發(fā)到測試系統(tǒng)的數(shù)據(jù)采集處理都實現(xiàn)軟件控制,實時性有了很大的提高。
RS 232采用負邏輯電平標準,邏輯“1”為-3~-15 V,邏輯“0”為+3~+15 V,容限大、數(shù)據(jù)線少、抗干擾能力強,可實現(xiàn)遠程數(shù)據(jù)傳輸。
基于CPLD的RS 232通訊接口設(shè)計,采用MAX232進行電平和邏輯關(guān)系的變換,由于CPLD與接口之間按并行方式傳輸,接口與外設(shè)采用串行方式,故需要在串行接口中加入串并轉(zhuǎn)換模塊。典型的串行接口模塊如圖6所示。
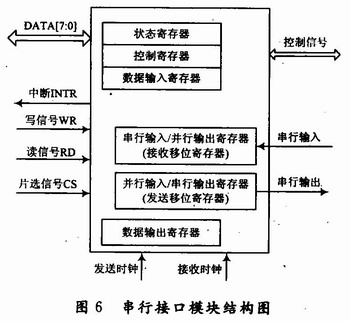
在數(shù)據(jù)輸入過程中,串行數(shù)據(jù)按位進入模塊的“接收移位寄存器”,當接收一個完整字符后,數(shù)據(jù)從“接收移位寄存器”送入“數(shù)據(jù)輸入寄存器”再通過并行總線DATA[7:O]將數(shù)據(jù)并行取走。數(shù)據(jù)輸出過程剛好相反。數(shù)據(jù)的傳輸速度由接收/發(fā)送時鐘決定。
電磁扳機控制儀中的RS 232接口電路如圖7所示。
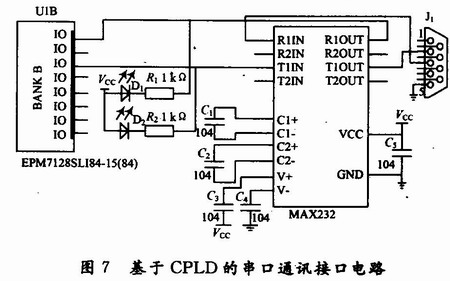
圖7為采用MAX232芯片實現(xiàn)串口通訊電路,該芯片可以適應(yīng)+5 V單電源供電環(huán)境,硬件接口簡單,易于實現(xiàn)。MAX232包含了兩路接收器和驅(qū)動器,內(nèi)部有一個倍壓器和一個電壓反相器,可以將輸入的+5 V電源電壓,變換成RS 232的輸出電平±10 V。圖7中的4個電容可以采用0.1 μF非極性瓷片電容代替1μF/16 V電解電容,并且盡量靠近芯片,以提高抗干擾能力。
4 結(jié)語
在設(shè)計基于CPLD技術(shù)的槍械電磁扳機控制儀的工作中,充分了解原有控制儀中存在的諸如安全性差、無法精確控制、無法實現(xiàn)組網(wǎng)測試等問題,從電磁兼容性、系統(tǒng)工作的穩(wěn)定性,安全性出發(fā)進行設(shè)計實踐,取得了很好的效果。所設(shè)計的控制儀實物經(jīng)過靶場試驗,能夠適應(yīng)靶場環(huán)境下復(fù)雜多變的電磁環(huán)境,能夠安全可靠地執(zhí)行測試工作。