
隨著電子微技術的發(fā)展,電機控制、電氣傳動形成了一門多學科交叉的“運動控制”技術。運動控制系統(tǒng)能使被控機械運動實現精確的位置控制、速度控制、加速度控制、轉矩或力的控制,以及這些被控機械量的綜合控制。H橋驅動電路能與主處理器、電機等構成一個完整的運動控制系統(tǒng),可應用于步進電機、交流電機及直流電機等的運動控制。
1 電機運動控制及其驅動電路
在電機的運動控制中,最常見的是電機的雙向轉動和調速,流經電機繞組的電流大小和方向要受控。

圖1,圖2是由4個N溝道MOs管(M1~M4)和一個電機(M)組成的H橋。在圖1中,當M1和M4導通時,電流從電源正極經M1從左至右穿過電機,然后再經M4回到電源負極,電機沿順時針轉動。在圖2中,當M3和M2導通時,電流從右至左流過電機,電機沿逆時針轉動。因此,通過調整MOS管的導通與截止時序可以控制電機的轉向,通過調整流經電機電流的大小可以控制電機的轉速。
在此介紹一款基于HIP4081設計的厚膜H橋電機驅動電路,用于某炮瞄系統(tǒng)。電路內部集成了CMOS控制電路和由MOS管組成的H橋,它能為負載提供5 A的連續(xù)電流。該電路能在60 V的供電電源范圍內安全工作,用戶只需提供與TTL電平兼容的PWM信號就可進行4象限模式的幅值和方向同時控制,而且與數字控制器的接口非常簡單。其內部電路可提供適當的死區(qū)時間間隔以保護H橋的4個N溝道場效應管,效率可達97%。提供有與TTL兼容的使能管腳來關斷4個場效應管。
2 HIP4081內部結構及技術特點
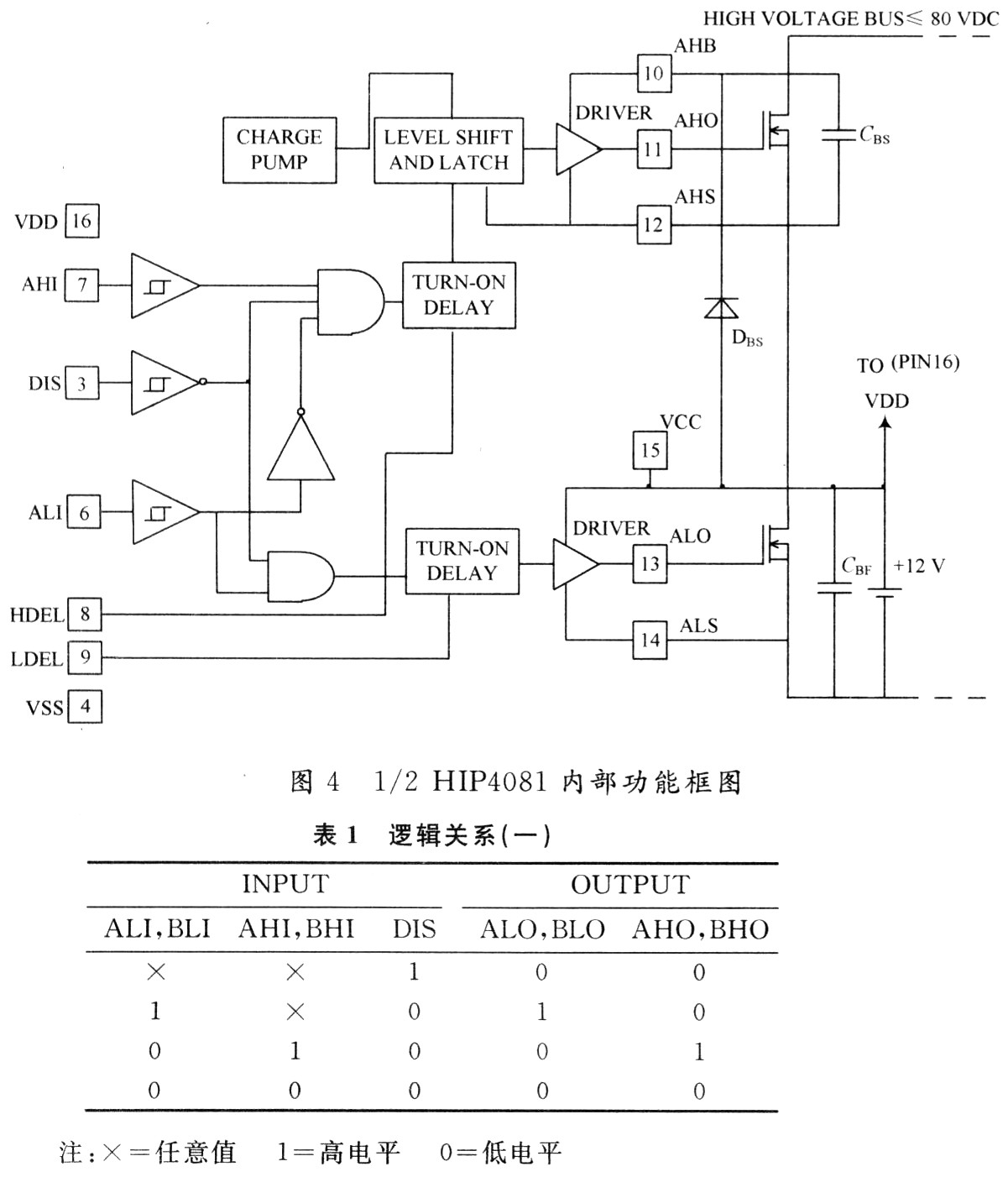
HIP4081是intersil公司推出的一款專門用于控制H橋的高頻全橋驅動芯片。采用閂鎖抗干擾CMOS制造工藝,具有獨立的低端和高端輸入通道,分別獨立驅動4個N溝道MoS管;輸出峰值電流為2 A;芯片內部具有電荷泵和死區(qū)時間設置;懸浮電源采用自舉電路,其高端工作電壓可達95 V,邏輯電源電壓范圍6~15 V,工作頻率高,可達1 MHz;具有能控制所有輸入的禁止端,可方便地與外接元件形成保護電路。圖3給出HIP4081的引腳排列定義,圖4顯示了1/2HIP4081(A邊)的內部功能框圖。主要組成部分有:邏輯輸入、使能、電荷泵、電平平移及死區(qū)時間設置等。
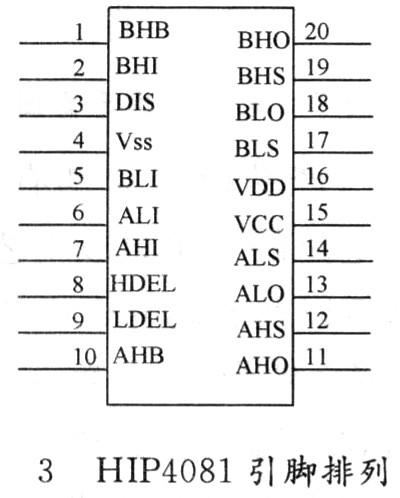
3 HIP4081引腳排列
在圖4中,Au,AHl分別是A邊的低邊輸入和高邊輸入;ALO,AHO分別是A邊的低邊輸出和高邊輸出,DIS是使能輸入;在另一半(B邊)的內部功能圖中,BLI、BHl分別是B邊的低邊輸入和高邊輸入;BL0,BH0分別是B邊的低邊輸出和高邊輸出。他們之間的邏輯關系如表1所示。
3 電路實現基本原理
電路原理框如圖5所示。
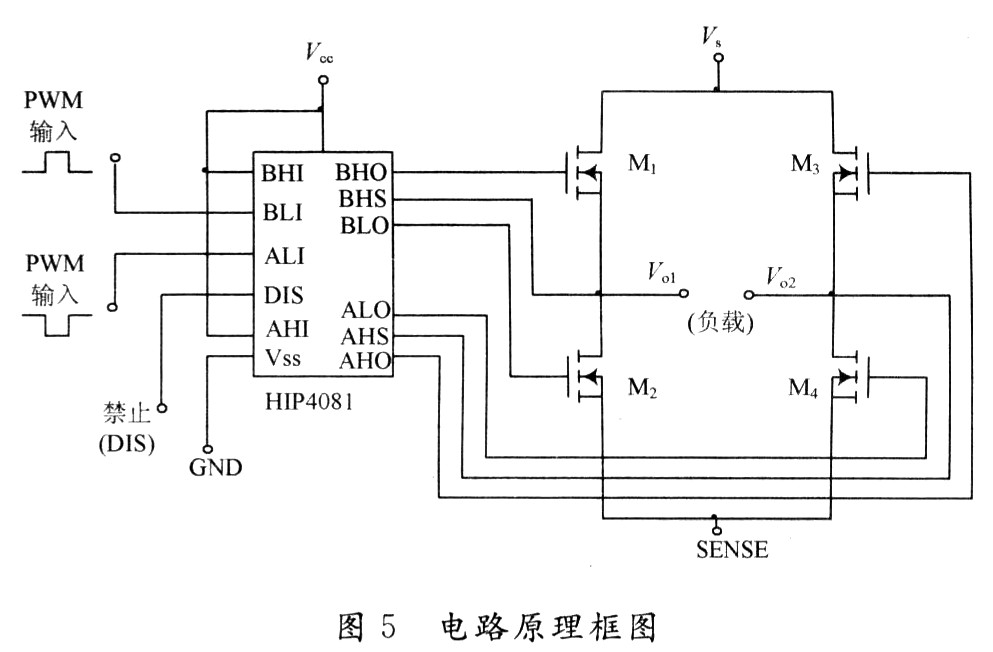
在圖5中,VCC為內部邏輯電路和MOS管上臂和下臂驅動器的低壓電源;Vs為H橋供電電源,MOS管從這個電源端獲得輸出電流,該腳電壓范圍為Vcc~+80 V;V01,為半橋的輸出腳1,當PwM輸入ALI為高,BLI為低時,該腳輸出為Vs;Vo2為半橋的輸出腳2,當PwM輸入ALI為低,BLl為高時,該腳輸出為Vs;SENSE為2個半橋下臂的共同聯接點,可連接一個到Vs地的檢測電阻以檢測電流,該腳也可以直接連到Vs的地。GND為輸入邏輯和Vcc的地;PWM輸人為用于輸入與TTL兼容的PwM信號,占空比在O%~100%之間;DIS為用于關斷4個MOS管,該腳為1時為關斷,為0時使能。
3.1 電路工作邏輯時序及電機運動狀態(tài)分析
在圖5中,當使能端D1S處于高電平“1”時,無論ALI,BLI是“1”還是“O”,ALO,BLO,AH0,BH0都為“0”,電路處于禁止狀態(tài),電機停轉。當使能端DIS處于低電平“O”時,ALl和BLI可通過反相器分別同時接收PWM信號的高電平“1”和低電平“0”。當ALl為1,BLI為0時,此時,ALO為1,AHO為0,BLO為O,BHO為1,H橋中的MOS管M1與M4導通,H橋處于圖1狀態(tài),電機順時針旋轉。當ALI為O,BLI為1時,此時,AL0為0,AHO為1,BLO為1,BHO為O,H橋中的MOS管M3與M2導通,H橋處于圖2狀態(tài),電機逆時針旋轉。當ALI,BLI同時為O時,ALO,BLO都為O,AH0,BHO都為1,電機中沒有電流流過,處于制動狀態(tài)。當ALI,BLI同時為1時,AL0,BLO都為1,AHO,BHO都為O,電機中也沒有電流流過,同樣處于制動狀態(tài)。其邏輯關系如表2所示。

3.2 死區(qū)時間的考慮
在圖5中,保證H橋上2個同側的MOS管(M1和M2,M3和M4)不會同時導通非常重要。如果MOS管M1和M2(或M3和M4)同時導通,那么電流就會從電源Vs正極穿過2個MOS管直接回到負極。此時,電路中除了MOS管外沒有其他任何負載,因此電路上的電流就可能達到最大值(該電流僅受電源性能限制),甚至燒壞MOS管。基于上述原因,在實際驅動電路中要使M1與M2或M3與M4在導通時間上有一個延遲,也稱死區(qū)時間。
HIP4081留有HDEL和LDEL兩個端口(見圖4),用戶通過外接電阻,可根據實際電路工作情況,自行定制死區(qū)時間。死區(qū)時間與HDEL/LDEL電阻的關系如圖6所示。

3.3 效率的考慮
在圖5中,決定驅動電路效率的主要是以下3個因素:H1P4081的靜態(tài)功耗;Vcc電源的動態(tài)功耗;MOS管的I2R損耗。
由于HIP4081是CMOS器件,第(1)項損耗很小,可忽略不計,第(2)項損耗雖然大一些,但遠小于(3)項(尤其是滿負荷輸出時)。而MOS管的I2R由其導通電阻決定,因此選擇合適的M0s管組成H橋電路,可以減少(3)項損耗。該電路選用N溝道HEXFETPower MOSFET IRFPP250N,其導通電阻為O.075 Ω,降低了導通損耗,提高了效率。
3.4 產品結構的考慮
(1)該產品結構采用厚膜混合集成技術設計,如圖7所示,在具有高導熱率的AlN陶瓷基板上通過厚膜印燒工藝制作厚膜基板,并通過基板金屬化與焊接技術,將ALN基板與金屬外殼進行焊接,大大提高了電路的導熱能力和功率密度。

(2)在圖7中,產品內部全部有源器件采用裸芯片,通過混合集成電路的二次集成工藝技術,將元器件、ALN厚膜陶瓷基板以及金屬外殼組裝在一起。形成具有全密封金屬外殼、外形尺寸為32 mm×32 mm×7 mm的雙列直插式厚膜混合集成產品,大大縮小了體積,減少了產品內部級連和焊點,提高了可靠性。
厚膜H橋電機驅動電路經過實際應用表明:該電路不僅安全可靠地實現了電機的雙向轉動和調速,提高了驅動電路和系統(tǒng)的可靠性,而且產品體積小,導熱性能好,效率高,能在惡劣的使用環(huán)境下安全工作,適合軍、民兩用。