
微機電傳感器(MEMS)慣性傳感器在近幾年來高速發(fā)展并得到了廣泛的應(yīng)用。微慣性傳感器作為一種重要的MEMS,由微型陀螺儀、微型加速度計、專用集成電路(ASIC)、嵌入式微處理器及相應(yīng)的軟件組成,輸出可以包含角速度、加速度、姿態(tài)等多種信息,并且其體積小、集成度高、使用方便,在軍民等領(lǐng)域都得到廣泛應(yīng)用。
CRSl0是Silicon SENSING公司的一款高精度的MEMS單軸陀螺儀,它是數(shù)字式輸出,輸出傳感器運動過程的角速度和傳感器工作的環(huán)境溫度。
在轉(zhuǎn)角測量方面,傳統(tǒng)的方法是使用角度傳感器,測量起始時間的角度值,然后相比較得到轉(zhuǎn)過的角度。在此,根據(jù)運動學(xué)原理,應(yīng)用CRSl0陀螺儀,設(shè)計了一個角速度和轉(zhuǎn)角測量系統(tǒng),系統(tǒng)配置有數(shù)據(jù)輸出接口和液晶顯示界面。
1 CRS10功能介紹及使用
CRSl0是一款高精度的數(shù)字角速率陀螺儀,集成度高,較寬的工作溫度(-40~80℃),高帶寬和寬泛的頻率范圍,極低的角速率隨機漂移,標(biāo)準(zhǔn)5 V電壓供電,SPI數(shù)據(jù)輸出和模擬端口輸出2種輸出方式滿足各種應(yīng)用不同需求。在CRSl0的默認配置是為75 Hz帶寬,±375(°)/s角速率測量訪問。用戶可根據(jù)需要,設(shè)置其角速率測量范圍和帶寬。例如可設(shè)置±75(°)/s的測量范圍,也可設(shè)置帶寬5、10、25、40、50、60和100 Hz。
CRSl0采用23 mmxl7 mmxl0 mm封裝。無論是垂直或可用水平支架可表面安裝在PCB上。其體積小,集成度高,易于安裝。可廣泛應(yīng)用于汽車偏航率測定、制導(dǎo)和控制、平臺穩(wěn)定、圖像穩(wěn)定、慣性測量裝置、機器人和導(dǎo)航等領(lǐng)域。
1.1 CRSl0功能介紹
圖1(a)和圖l(b)分別是CRSl0的實物圖和功能框圖。由圖l(b)可知,在CRSl0中,MEMS陀螺儀先感知外界信號,并將信號輸出給數(shù)據(jù)采集專用集成電路,數(shù)據(jù)采集電路將處理后的信號輸出給微控制器。微控制器將得到的數(shù)據(jù)結(jié)果存入輸出寄存器。通過SPI總線,外部SPI主控器
件向CRSl0發(fā)送控制指令或者讀取。CRSl0內(nèi)部設(shè)置有控制寄存器,寄存器都有默認的值,通過對控制寄存器的修改寫操作,可以改變角速率測量范圍頻率和輸出帶寬等方面的控制效果。
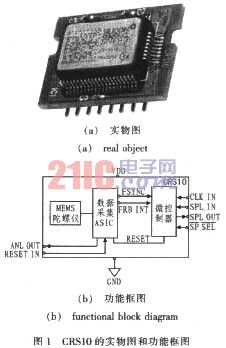
CRSl0測量的是平行于PCB平面的角速率。CLK_N,SPI_IN,SPI_OUT和引腳是傳感器的SPI接口,引腳是傳感器的復(fù)位引腳。A-NL_OUT是角速率的模擬輸出端口。
CRSl0的數(shù)字輸出部分還包含其工作環(huán)境的溫度值。假如在無償條件下,陀螺儀性能不佳,那么可通過使用這個溫度進行建模和補償。
1.2 CRS10使用方法
1.2.1 CRS1O硬件建接
CRSl0的SPI接口與各種微處理器SPI主控制器件接線如圖2所示。SPI總線的時鐘頻率最高可達到2.5 MHz,建議采用1 MHz。

1.2.2 CRSl0數(shù)據(jù)讀寫與數(shù)據(jù)處理
通過SPI總線,可以對CRSl0進行讀寫操作。可以根據(jù)設(shè)計要求設(shè)置控制寄存器的值達到控制效果,也可以使用寄存器的默認設(shè)置。控制指令由1個字節(jié)狀態(tài)位,4個字節(jié)的數(shù)據(jù)位和1個字節(jié)的校驗位共6個字節(jié)組成。向CRSl0寫控制指令時,只要將指令串通過SPI總線發(fā)送給CRSl0即可。
讀取CRSl0輸出的數(shù)據(jù)時,從總線上讀取到的是6個字節(jié)的數(shù)據(jù),依次是:1個字節(jié)的狀態(tài)位,2個字節(jié)的角速率數(shù)據(jù)位,2個字節(jié)的溫度數(shù)據(jù)位和1個字節(jié)的校驗位。
角速率值(RATE_OUT)和溫度值(TEMP_OUT)輸出的數(shù)據(jù)格式均為16位二進制的補碼,可以使用式(1)進行解算:

式中,DATA_VALUE為寄存器的輸出數(shù)據(jù),VALUE為轉(zhuǎn)換后實際的測量量的值,Scale為寄存器值最小值代表的最小單位,n為對應(yīng)寄存器的數(shù)據(jù)位數(shù)。
在這里有一個小技巧,由于數(shù)據(jù)是16位二進制補碼類型,可以使用數(shù)據(jù)類型為整型(int)存儲數(shù)據(jù),這樣亦可以省略其中的數(shù)據(jù)處理過程。
2 角速率和轉(zhuǎn)角測量系統(tǒng)設(shè)計
這里給出了基于LMS8962與CRSl0的傾角測量系統(tǒng)的原理與設(shè)計。
2.1 轉(zhuǎn)角測量原理
CRSl0是測量其所在PCB平面的角速率。根據(jù)運動學(xué)原理,角度等于角速率在時間上的積分,因此,可以得到轉(zhuǎn)角與角速率的關(guān)系:
![]()
式中,θ是當(dāng)前角度,θo是運動初始時的初始轉(zhuǎn)角,ω為角速率,to為初始時刻,t為當(dāng)前時刻。
在數(shù)字系統(tǒng)中,采用其離散型方程:
![]()
式中,θ、θo、ω的含義與式(2)相同,△t表示采樣數(shù)據(jù)的時間間隔。
根據(jù)上述原理,利用CRSl0設(shè)計測量轉(zhuǎn)角系統(tǒng)。只要保證采樣頻率夠快,轉(zhuǎn)角平臺穩(wěn)定,噪聲較小即可。
2.2 硬件電路設(shè)計
使用LMS8962與CRSl0搭建成傾角測量系統(tǒng),LMS8962是一款高性能的32位Cortex-M3內(nèi)核微處理器。它有豐富的片內(nèi)外設(shè),如模數(shù)轉(zhuǎn)換(ADC),PWM,CAN和串行總線(SSI)等,功能強大,易于集成。
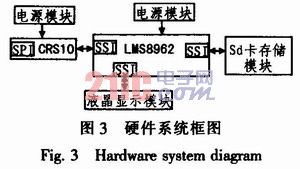
LMS8962與CRSl0組成的角速率和轉(zhuǎn)角測量系統(tǒng)硬件設(shè)計框圖如圖3所示。LMS8962通過SSI總線與CRSIO進行通信。將采集到的數(shù)據(jù)存儲到SD卡中,將解算得到的結(jié)果實時在液晶顯示模塊上顯示。SD卡的數(shù)據(jù)存儲為將來的數(shù)據(jù)分析提供一個很好的數(shù)據(jù)采集平臺。SSI是串行通信總線,它兼容SPI總線。
2.3 軟件設(shè)計
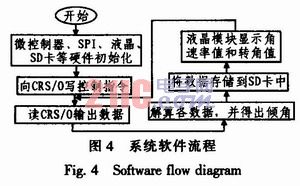
圖4是系統(tǒng)的軟件設(shè)計流程。程序啟動進入系統(tǒng)初始化,接下來向CRSl0寫控制指令,以設(shè)置CRSl0工作在需求的模式下,然后讀取返回的數(shù)據(jù)并進行解算,最后通過存儲數(shù)據(jù)到SD卡中并在液晶模塊中顯示。
3 試驗結(jié)果
為了驗證系統(tǒng)測量角速率和轉(zhuǎn)角的效果,采用姿態(tài)與航向參考系統(tǒng)(attitude and heading reference system)AHRS500GA-226傳感器作為參考進行測試。AHRS500GA-226是Crossbow Technology公司的一款高精度的IMU。將兩系統(tǒng)固定安裝在同一平臺上,使CRSl0測量的角速率平面與AHRS的YAW平面(航向角速率和航向角測量平面)相一致。比較兩個系統(tǒng)輸出的角速率和角度數(shù)據(jù),得到如圖5所示的結(jié)果。
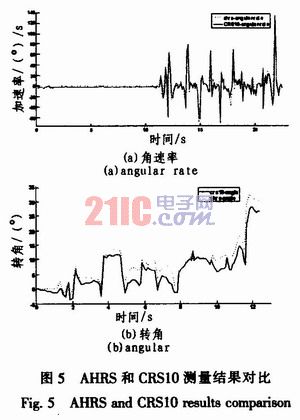
由圖中5可看出,CRSl0所測量的角速率與AHRS測量得到的角速率運動的趨勢一致,AHRS的結(jié)果比較平滑。CRSl0有噪聲,局部陡峭。在靜止和小角速率運動時兩者測量結(jié)果基本重合,誤差在0.1(°)/s左右。在大角度運動和急速轉(zhuǎn)動時,兩者的重合效果不佳,誤差較大,有達到7(°)/s。這是由于AHRS得到的數(shù)據(jù)是經(jīng)過濾波和數(shù)據(jù)融合處理的。角度測量的趨勢一致,在局部重合的比較好。但角度測量的誤差比較大。原因在于本文使用的角度計算方法:1)使用的是原始的角速率數(shù)據(jù),角速率沒有經(jīng)過濾波處理,噪聲較大,積分疊加到角度上得到的偏差亦較大;2)使用的是簡單的積分求角度,沒有補償,沒有平滑。綜上可知,角速率測量效果比較好,角度測量可行,但算法有待提高。
4 結(jié)論
基于LMS8962 ARM微處理器與CRSl0陀螺儀的角速率與轉(zhuǎn)角測量系統(tǒng)角速率測量誤差平均為0.550(°)/s,最大達到7(°)/s,在小角速率測量時效果比較好。轉(zhuǎn)角測量誤差平均誤差為2.5°,測量精度有待進一步提高。造成角度測量誤差的原因主要是沒有對得到的角速率進行濾波和數(shù)據(jù)的融合。濾波算法和融合算法的使用和完善是該系統(tǒng)今后要完善的主要工作。從測量的結(jié)果來看,只要做好濾波和融合的處理,提高系統(tǒng)的精確性是可行的。