
0 引言
石英晶體振蕩器受制造工藝、器件老化以及外部溫度等因素影響,其實(shí)際頻率值與標(biāo)稱頻率值存在偏差。此外,晶體振蕩器內(nèi)部存在著各種噪聲也會使頻率值產(chǎn)生隨機(jī)起伏,從而導(dǎo)致晶振頻率的準(zhǔn)確度和穩(wěn)定度降低。當(dāng)前,國內(nèi)外在研究晶體振蕩器的老化和隨機(jī)噪聲、分析晶振頻率誤差特性方面提出了很多方法,比較常見的有時(shí)間對數(shù)線性模型法、自適應(yīng)濾波法及非線性時(shí)變預(yù)測法。前兩種方法的缺點(diǎn)是參數(shù)較多,選擇合適的參數(shù)較難,非線性時(shí)變預(yù)測法的模型描述能力強(qiáng),但由于沒有函數(shù)參數(shù)的顯式表達(dá)式,不能將模型求解歸結(jié)為參數(shù)求解問題,一般通過學(xué)習(xí)來逼近該函數(shù),主要用于頻率變化的預(yù)測。
在上述方法的基礎(chǔ)上,本文利用CPLD設(shè)計(jì)了一種電路,該電路采用比時(shí)法來測量晶振頻率變化,并根據(jù)其頻率隨時(shí)間變化擬合曲線的特點(diǎn),用線性回歸法分析其頻率誤差特性。該方法模型簡單,參數(shù)易于估計(jì),可通過簡潔的補(bǔ)償方法消除晶振相對頻偏,具有實(shí)際的應(yīng)用價(jià)值。
1 晶振頻率測量系統(tǒng)組成
測量系統(tǒng)由GPS接收機(jī)、晶振、時(shí)差測量模塊、時(shí)鐘產(chǎn)生模塊、計(jì)算機(jī)數(shù)據(jù)采集處理組成。組成原理如圖1所示。
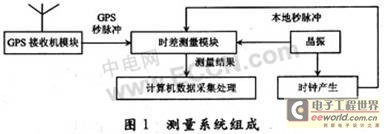
GPS接收機(jī)每秒輸出1路TTL電平的標(biāo)準(zhǔn)秒脈沖(1 PPS),晶振是時(shí)差測量和時(shí)鐘產(chǎn)生的頻率源。時(shí)鐘產(chǎn)生電路產(chǎn)生本地秒脈沖。時(shí)差測量電路測量GPS秒脈沖與本地秒脈沖的相位差值。
采用比時(shí)法測量晶振頻率的系統(tǒng)工作原理如下:首先由晶振分頻得到本地的1 Hz頻率源,將GPS秒脈沖與本地晶振秒脈沖送入時(shí)差測量模塊進(jìn)行相位比較,得到兩者的相位差信號,設(shè)計(jì)時(shí)間間隔計(jì)數(shù)器對此相差閘門信號計(jì)數(shù),計(jì)數(shù)值即為晶振頻率相對于標(biāo)準(zhǔn)頻率的偏差,反映了晶振頻率的誤差特征。時(shí)間間隔計(jì)數(shù)器每秒測量一次兩者的偏差值,需要測量的頻差數(shù)據(jù)量由計(jì)算機(jī)設(shè)定,測量結(jié)果傳送到計(jì)算機(jī)進(jìn)行數(shù)據(jù)統(tǒng)計(jì),并對晶振頻率誤差特性進(jìn)行分析。本地時(shí)鐘產(chǎn)生、時(shí)差測量及數(shù)據(jù)采集電路模塊等都由CPLD設(shè)計(jì)實(shí)現(xiàn)。
2 模型建立
實(shí)驗(yàn)以GPS秒脈沖作為標(biāo)準(zhǔn)參考信號,采用比時(shí)法對晶振的輸出頻率進(jìn)行測量。按照建立的測量系統(tǒng),實(shí)際對某一晶振采集到30個(gè)計(jì)數(shù)值,如表1所示。
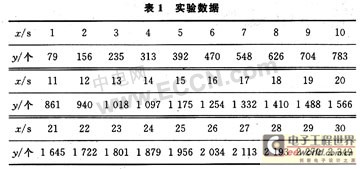
表1中x表示測量的時(shí)間(單位:s);y表示晶振脈沖計(jì)數(shù)個(gè)數(shù)。假設(shè)晶振在某秒計(jì)數(shù)值為M,它的計(jì)數(shù)周期為T,則MT為晶振秒脈沖與GPS秒脈沖的時(shí)間差值。例如在第6 s時(shí)測得計(jì)數(shù)值為470,則表示在第6 s時(shí)晶振與GPS秒脈沖的時(shí)間差為470T。為了研究時(shí)間x與計(jì)數(shù)個(gè)數(shù)y之間的關(guān)系,用ORIGIN工具軟件對數(shù)據(jù)進(jìn)行擬合處理,得到的x,y,關(guān)系曲線如圖2所示。

從散點(diǎn)圖可以看出,測量計(jì)數(shù)值和測量時(shí)間大致呈線性關(guān)系。據(jù)此假設(shè)這兩個(gè)變量之間的內(nèi)在關(guān)系是一條直線,這些點(diǎn)與直線的偏離是由于測量過程中其他一些隨機(jī)因素的影響而引起的,這樣可以假設(shè)這組測量數(shù)據(jù)有如下結(jié)構(gòu)形式:
![]()
式中:ε1,ε2,…,εN分別表示其他隨機(jī)因素對變量y1,y2,…,yN影響的總和,一般假設(shè)它們是一組相互獨(dú)立,并服從同一正態(tài)分布N(0,δ)的隨機(jī)變量。變量x在實(shí)驗(yàn)中為自然數(shù),表示具體的秒脈沖數(shù)值。這樣,變量y表示實(shí)際所測得的晶振與標(biāo)準(zhǔn)頻率的計(jì)數(shù)差值,它是服從N(β+βx,δ)的隨機(jī)變量。
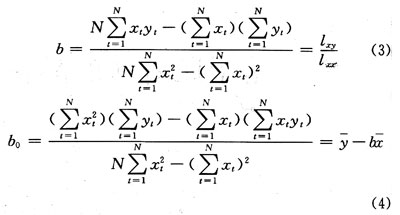
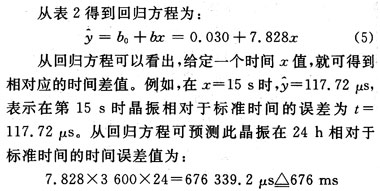
用最小二乘法們來估計(jì)參數(shù)β0,β。設(shè)b0,b分別是參數(shù)β0,β的最小二乘估計(jì),于是得到一元線性回歸的回歸方程:
![]()
式中:b0,b是回歸方程的回歸系數(shù),分別表示晶振相對于標(biāo)準(zhǔn)頻率的初始誤差和累積誤差。應(yīng)用最小二乘法可求得回歸系數(shù)b,b0為:
3 數(shù)據(jù)分析與處理
3.1 回歸系數(shù)估計(jì)
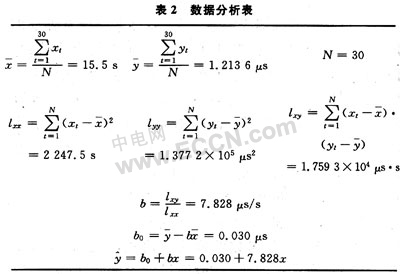
為了定量分析數(shù)據(jù),從而確定晶振頻率誤差的組成,首先對上述測得的數(shù)據(jù)進(jìn)行歸一化處理。實(shí)際測量中得到的是晶振脈沖的計(jì)數(shù)個(gè)數(shù),設(shè)測量系統(tǒng)所用晶振頻率為10 MHz,可將計(jì)數(shù)數(shù)據(jù)轉(zhuǎn)化為晶振相對于標(biāo)準(zhǔn)時(shí)間每秒的時(shí)間之差。例如在x=30 s時(shí),y=2 349,表示在第30 s時(shí),晶振頻率相對于標(biāo)準(zhǔn)頻率的計(jì)數(shù)值為2 349,若晶振頻率f=10 MHz,則可得到在第30 s時(shí)晶振相對于GPS時(shí)間的誤差為t=y/f=234.9μs。
用Matlab對歸一化數(shù)據(jù)進(jìn)行處理,依照最小二乘原理,得到計(jì)數(shù)時(shí)間x與時(shí)間差值y的均值,以及x的自相關(guān)、x和y的互相關(guān)、y的自相關(guān)及回歸方程如表2所示。
以上求得了回歸方程,但是該方程是否基本上符合y與x之間的客觀規(guī)律,是否符合晶振頻率誤差變化的實(shí)際特點(diǎn),還需要對回歸方程做進(jìn)一步的分析。在回歸分析法中,通常采用方差分析法們對回歸方程的顯著性進(jìn)行檢驗(yàn),其實(shí)質(zhì)是將N個(gè)測量值的影響從數(shù)量上區(qū)分開,然后用F檢驗(yàn)法對所求回歸方程進(jìn)行顯著性檢驗(yàn)。
3.2 晶振頻率誤差數(shù)據(jù)方差分析及顯著性檢驗(yàn)
測量值y1,y2,…,yN之間的差異(稱為變差)是由兩方面的原因引起的。一是自變量取值的不同,二是其他因素(包括試驗(yàn)誤差、隨機(jī)誤差等)的影響。為了對回歸方程進(jìn)行檢驗(yàn),把兩者所引起的變差從y的總變差中分解出來。根據(jù)上述數(shù)據(jù)可得:
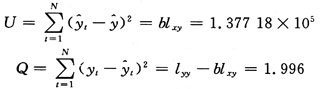
式中:U稱為回歸平方和,它反映了在y的總變差中由于x和y的線性關(guān)系而引起的y變化的部分;Q稱為殘余平方和,即所有測量點(diǎn)距回歸直線的殘余誤差平方和。
若總的平方和由N項(xiàng)組成,其自由度就為N-1,總的離差平方和的自由度可分為回歸平方和的自由度υU和殘余平方和的自由度υQ之和,即:
![]()
在一元線性回歸中,υU=1,υS=N-1,則Q的自由度υQ=N-2。由回歸平方和與殘余平方和的意義可知,一個(gè)回歸方程是否顯著,也就是y與x的線性關(guān)系是否密切,取決于U及Q的大小,U愈大Q愈小,說明y與x的線性關(guān)系愈密切。通常可以采用F檢驗(yàn)法來對方程進(jìn)行顯著性檢驗(yàn)。對于一元線性回歸,將U及Q的值代入上式得到統(tǒng)計(jì)量F:
![]()
由F分布表可以查出,F(xiàn)≥F0.01(1,28)=7.64。可認(rèn)為回歸是高度顯著的。
殘余平方和Q除以它的自由度υQ所得商:
![]()
稱為殘余方差,它可以看作排除了x對y的線性影響后,衡量y隨機(jī)波動大小的一個(gè)估計(jì)量。殘余方差的平方根:
![]()
稱為殘余標(biāo)準(zhǔn)差,它可用來衡量所有隨機(jī)因素對y一次性測量平均變差的大小,σ愈小,則回歸直線的精度愈高。
把平方和及自由度進(jìn)行分解的方差分析數(shù)據(jù)結(jié)果歸納在一個(gè)表格中,如表3所示。
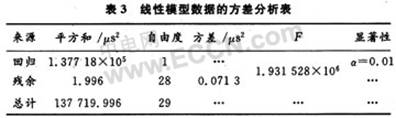
從表3可以看出,在30 s時(shí)間內(nèi),晶振實(shí)際頻率與其標(biāo)稱頻率的相對偏差引起的誤差平方和為1.377 18×105μs2,其他各種隨機(jī)因素引起的誤差的平方和為1.996μs2。晶振相對頻偏引起的誤差遠(yuǎn)遠(yuǎn)大于其他因素引起的誤差,表明了晶振頻率誤差貢獻(xiàn)主要來源于實(shí)際頻率與標(biāo)稱頻率之間的頻偏。通過頻率修正即可得到一種高穩(wěn)定度的頻標(biāo)源。
4 結(jié)語
以上分析結(jié)果表明,該晶振頻率誤差主要來源于實(shí)際頻率與標(biāo)稱頻率的相對偏差,隨機(jī)誤差對晶振整體誤差的貢獻(xiàn)很小。通過對晶振標(biāo)稱頻率值進(jìn)行在線補(bǔ)償可以消除其相對頻偏,從而獲得一種具有較高穩(wěn)定度的頻率源,可為需要時(shí)間顯示的場所提供高精度的時(shí)間服務(wù)。