
1. 問題闡述
應(yīng)用概述
電動機(jī)控制系統(tǒng)的設(shè)計(jì)是一個涉及多學(xué)科的問題,包括機(jī)械、電氣和控制系統(tǒng)。OPTIMUS 能探索設(shè)計(jì)空間并通過其強(qiáng)大的優(yōu)化算法在不需要用戶干涉的情況下自動改進(jìn)設(shè)計(jì)。本應(yīng)用案例演示了OPTIMUS 如何與Simulink 集成在一起,通過修改(a)電動機(jī)的磁極寬度 (b)激勵信號,來優(yōu)化電動機(jī)的輸出扭矩波紋和開關(guān)損耗。
設(shè)計(jì)問題
控制系統(tǒng)的模型在Simulink 中建立。電動機(jī)不同磁極寬度對應(yīng)的電磁場已經(jīng)在ANSYS 中計(jì)算完成,而線圈電感作為結(jié)果被導(dǎo)入到Simulink 的模型中。逆變電路在PSpice 中完成建模,然后通過SLPS 接口將電路模塊轉(zhuǎn)換為與Simulink 兼容的模塊,由此完成了集成。
使用的軟件工具
• OPTIMUS 及其Matlab/Simulink 接口
• Simulink
• PSpice (SLPS 接口)
• ANSYS
仿真過程與OPTIMUS工作流OPTIMUS 圖形用戶界面集成了仿真程序,它們的工作流程以及輸入輸出文件。通過OPTIMUS 與Matlab/Simulink 的接口,OPTIMUS很方便地參數(shù)化了仿真的輸入文件,并從輸出文件中解析出需要的輸出參數(shù)(圖 1)。
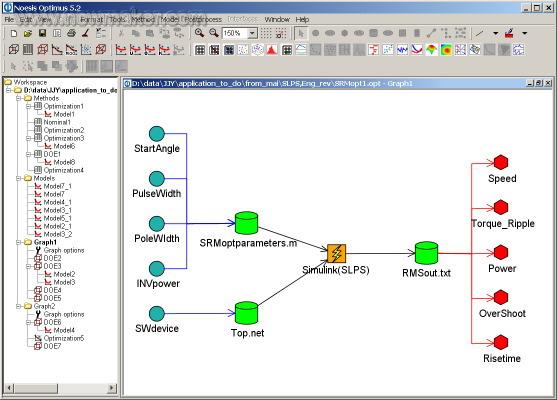
圖 1 – 電動機(jī)控制系統(tǒng)仿真的OPTIMUS 工作流
2. 設(shè)計(jì)參數(shù)和方法
模型
案例中的電動機(jī)是3 相激勵、6 極靜子、4 極轉(zhuǎn)子的開關(guān)磁阻電動機(jī)(SRM)。控制系統(tǒng)仿真在Simulink 中建立,電動機(jī)電磁場在ANSYS 中計(jì)算,逆變電路在PSpice 中建模。(圖2)
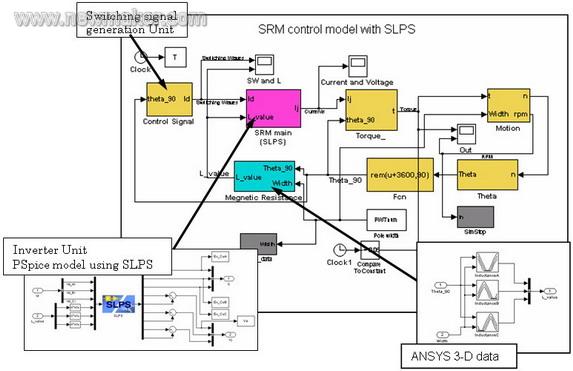
圖 2 – 電動機(jī)控制系統(tǒng)的Simulink 模型
選擇設(shè)計(jì)參數(shù)
3 個設(shè)計(jì)參數(shù)分別是電動機(jī)磁極寬度、激勵信號的起始角度和激勵信號的寬度。優(yōu)化目標(biāo)是最小化電動機(jī)輸出扭矩的波紋。約束條件是電動機(jī)轉(zhuǎn)速大于1000RPM。
方法應(yīng)用
試驗(yàn)設(shè)計(jì)與響應(yīng)面模型
試驗(yàn)設(shè)計(jì)(DOE)方法 與響應(yīng)面模型(RSM)被用于探索設(shè)計(jì)空間。在本案例中,應(yīng)用了100 個樣本點(diǎn)的拉丁超立方 方法。在此基礎(chǔ)上,建立了基于泰勒多項(xiàng)式的 最小二乘響應(yīng)面,來擬合試驗(yàn)設(shè)計(jì)樣本點(diǎn)。
設(shè)計(jì)優(yōu)化
OPTIMUS 在本案例中應(yīng)用了自適應(yīng)進(jìn)化(SAE)遺傳算法,通過在響應(yīng)面上求解來找到最小的電動機(jī)輸出扭矩波紋,同時也滿足電動機(jī)轉(zhuǎn)速不低于1000 RPM。在響應(yīng)面上求出的最優(yōu)解,在接下來在仿真工作流求解的局部優(yōu)化過程中,被用作起始點(diǎn)。這樣,通過幾個優(yōu)化算法、不同求解方式的策略化結(jié)合,使得最后能夠找到全局最優(yōu)設(shè)計(jì),同時縮短了優(yōu)化過程的時間。

圖3 – 貢獻(xiàn)度圖顯示了電動機(jī)磁極寬度與激勵信號起始角度是對輸出扭矩波紋影響最大的設(shè)計(jì)參數(shù)
3. 結(jié)果
結(jié)果闡述
試驗(yàn)設(shè)計(jì)和響應(yīng)面模型
拉丁超立方試驗(yàn)設(shè)計(jì)方法被運(yùn)行來最為建立相應(yīng)面的樣本。圖4 顯示了電動機(jī)磁極寬度和激勵信號寬度是對輸出扭矩波紋有較大影響的重要設(shè)計(jì)參數(shù)。這個響應(yīng)面模型是對仿真模型的近似。在優(yōu)化過程中,如果需要連續(xù)大量求解仿真模型,會需要相當(dāng)大的計(jì)算量。適當(dāng)?shù)厥褂庙憫?yīng)面模型能有效降低計(jì)算量,提高優(yōu)化過程的效率。響應(yīng)面模型的質(zhì)量(及其對于優(yōu)化過程可靠性)可以通過在建立過程中得到的回歸系數(shù)進(jìn)行確認(rèn)。

圖4 – OPTIMUS 建立響應(yīng)面顯示了輸出扭矩波紋與選擇的輸入?yún)?shù)之間的變化關(guān)系
OPIMUS 找到了最小的電動機(jī)輸出扭矩波紋的設(shè)計(jì),并且滿足了轉(zhuǎn)速約束條件(圖5)。相對于初始設(shè)計(jì),最優(yōu)設(shè)計(jì)有效降低了13.8%的電動機(jī)輸出扭矩波紋(圖6)。

圖5 – 優(yōu)化目標(biāo)函數(shù)的收斂: 最小化輸出扭矩波紋

圖6 – 優(yōu)化前后的電動機(jī)的輸出扭矩和轉(zhuǎn)速
4. 結(jié)論
結(jié)論
OPTIMUS 成功地自動化了Simulink仿真,并找到了最優(yōu)的磁極寬度、激勵信號的起始角度和寬度,使得電動機(jī)的輸出扭矩波紋得到了有效降低,并且保證了電動機(jī)轉(zhuǎn)速始終高于規(guī)定轉(zhuǎn)速。