
目前一些惡劣或危險(xiǎn)的環(huán)境人類仍然無(wú)法置身其中進(jìn)行現(xiàn)場(chǎng)檢測(cè),如出現(xiàn)險(xiǎn)情的礦井地道、地形崎嶇的巖洞等,很難取得現(xiàn)場(chǎng)的參數(shù)。在這種情況下只有借助于智能探測(cè)裝置。因智能小車控制方便、行動(dòng)靈活,對(duì)比其他載體工具更容易勝任探測(cè)任務(wù),因此成為各種探測(cè)儀器的首選工具。
本文設(shè)計(jì)的智能探測(cè)系統(tǒng)以小車為載體,將所測(cè)得的現(xiàn)場(chǎng)參數(shù)通過(guò)nRF24L01無(wú)線模塊實(shí)時(shí)傳回上位機(jī),具有快速靈活的特點(diǎn);在實(shí)際工作時(shí)可左右轉(zhuǎn)向和后退,自動(dòng)躲避障礙物;同時(shí)該小車操控方便,可通過(guò)MFC搭建的人機(jī)交互界面利用鼠標(biāo)和鍵盤對(duì)小車進(jìn)行遠(yuǎn)程控制。
1、系統(tǒng)總體結(jié)構(gòu)設(shè)計(jì)
該系統(tǒng)基于Actel FPGA實(shí)現(xiàn),采用兩塊Fusi。nStartkit開(kāi)發(fā)板,一塊作為車載控制板,另一塊作為中轉(zhuǎn)板。車載控制板負(fù)責(zé)采集溫度、濕度、板載電壓、當(dāng)前路況以及人體檢測(cè)等現(xiàn)場(chǎng)信息,驅(qū)動(dòng)小車運(yùn)行,同時(shí)通過(guò)無(wú)線發(fā)送現(xiàn)場(chǎng)信息以及接收上位機(jī)的控制命令。中轉(zhuǎn)板負(fù)責(zé)將接收到的無(wú)線信號(hào)通過(guò)串口轉(zhuǎn)發(fā)給PC機(jī),同時(shí)將PC機(jī)由串口返回的控制指令利用無(wú)線模塊發(fā)送給車載控制板。PC機(jī)上采用MFC編寫人機(jī)交互界面,顯示小車所在環(huán)境的相關(guān)信息,同時(shí)提供鼠標(biāo)、鍵盤等完善的操控手段。系統(tǒng)結(jié)構(gòu)如圖1所示。
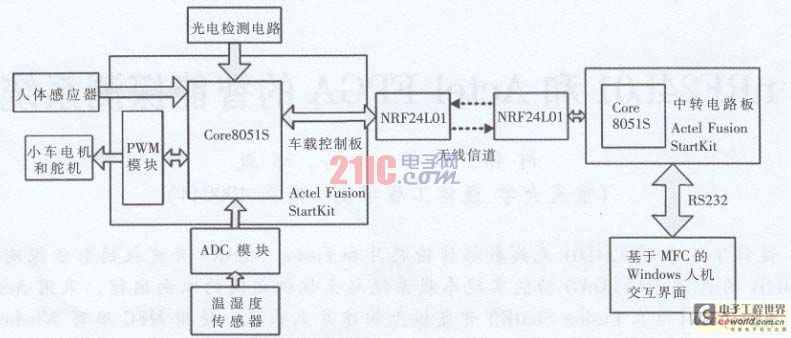
圖1 系統(tǒng)結(jié)構(gòu)框圖
2、系統(tǒng)硬件設(shè)計(jì)
2、1無(wú)線數(shù)據(jù)傳輸芯片nRF24L01
2.1.1芯片簡(jiǎn)介H
nRF24L01是挪威NorDic公司的單片2.4 GHz無(wú)線收發(fā)一體芯片,有多達(dá)125個(gè)頻道可供選擇,支持1 Mb/s和2 Mb/s傳輸速率。該芯片采用SPI接口進(jìn)行數(shù)據(jù)讀寫和參數(shù)配置,以寄存器映射方式對(duì)各個(gè)寄存器進(jìn)行管理,同時(shí)具有自動(dòng)重傳、動(dòng)態(tài)有效信息長(zhǎng)度(DPL)、應(yīng)答信號(hào)攜帶有效信息(ACK PAYLOAD)等高級(jí)功能。
2.1.2功能
動(dòng)態(tài)有效信息長(zhǎng)度(DPL)指的是發(fā)送端的nRF24L01芯片通過(guò)寫人有效數(shù)據(jù)區(qū)的數(shù)據(jù)長(zhǎng)度決定當(dāng)前一幀數(shù)據(jù)的大小,而接收端則通過(guò)接收到的數(shù)據(jù)幀中的控制域信息而不是寄存器中定義的數(shù)據(jù)長(zhǎng)度提取有效數(shù)據(jù)。這個(gè)功能極大地提高了無(wú)線信道的使用率,同時(shí)減少了冗余數(shù)據(jù)的傳播,降低了數(shù)據(jù)在空中滯留的時(shí)間和數(shù)據(jù)被污染的概率。配合nRF24L0l的CRC校驗(yàn)和自動(dòng)重傳功能,在有效地降低數(shù)據(jù)誤碼率的同時(shí)保證了數(shù)據(jù)傳輸?shù)臅r(shí)效性。
應(yīng)答信號(hào)攜帶有效信息(ACK PAYLOAD)指nRF24L01芯片在開(kāi)啟自動(dòng)重傳和DPL的基礎(chǔ)上實(shí)現(xiàn)的雙向通信功能。圖2為一對(duì)無(wú)線模塊之間的一次攜帶應(yīng)答有效信息的數(shù)據(jù)傳輸過(guò)程。主發(fā)送模塊(PTX)發(fā)送完第1幀數(shù)據(jù)后,自動(dòng)置為接收模式,等待主接收模塊(PRX)發(fā)送應(yīng)答信號(hào)或攜帶有效數(shù)據(jù)的應(yīng)答信號(hào)。主接收模塊收到主發(fā)送模塊發(fā)送的第1個(gè)數(shù)據(jù)幀后,若此時(shí)有需要附加的有效數(shù)據(jù),則在發(fā)送完ACK信號(hào)后繼續(xù)發(fā)送有效數(shù)據(jù)。而主發(fā)送模塊收到ACK信號(hào)后繼續(xù)接收有效信號(hào),直到空中沒(méi)有殘留的無(wú)線信號(hào)再開(kāi)始發(fā)送第2幀信號(hào)。
使用ACK PAYLOAD可以實(shí)現(xiàn)車載系統(tǒng)和PC機(jī)的雙向通信,該功能很好地解決了手動(dòng)切換無(wú)線收發(fā)狀態(tài)導(dǎo)致雙方互相等待的問(wèn)題,同時(shí)只在需要對(duì)車載控制板進(jìn)行控制的時(shí)刻附帶應(yīng)答有效信息,可以減少不必要的通信過(guò)程,大大提高了系統(tǒng)穩(wěn)定性。

圖2攜帶ACK PAYLOAD的1次數(shù)據(jù)傳輸示意圖
2.1.3實(shí)現(xiàn)功能的配置方法
要實(shí)現(xiàn)nRF24L01的ACK PAYLOAD功能需要經(jīng)過(guò)以下步驟:首先進(jìn)行無(wú)線模塊的基本配置,包括發(fā)送接收模式的選擇(CONFIG)、開(kāi)啟自動(dòng)重傳功能(EN_AA)、接收地址使能(EN_ADDR)、設(shè)置重傳時(shí)問(wèn)不為零(SET-UP RETR)等;然后同時(shí)開(kāi)啟DPL和ACK PAYLOAD功能,要實(shí)現(xiàn)這兩個(gè)功能,必須在完成第一步之后用nRF24L01白帶的ACTIVATE命令加上0x73數(shù)據(jù)開(kāi)啟默認(rèn)隱藏的兩個(gè)寄存器FEATURE和DYNPD。通過(guò)對(duì)這兩個(gè)寄存器的設(shè)置就可以實(shí)現(xiàn)數(shù)據(jù)的雙向通信。但要注意,接收端開(kāi)啟DPL后要使用R_RX PL WID命令讀取當(dāng)前數(shù)據(jù)幀的有效數(shù)據(jù)長(zhǎng)度,同時(shí)使用W ACK PAY-LOAD命令將ACK PAYLOAD寫入FIFO。
2.2 Core 80515架構(gòu)
Core 8051S是Actel公司推出的基于APB3總線的8051lP核,兼容8051的全部指令,同時(shí)又具備許多51單片機(jī)所沒(méi)有的獨(dú)特功能:
(1)具有可配置的JTAG接口調(diào)試功能,可利用Flash_Pro下載器作為其調(diào)試工具;優(yōu)化指令執(zhí)行速度,內(nèi)部設(shè)置流水線,可實(shí)現(xiàn)單個(gè)時(shí)鐘周期執(zhí)行一條指令,且是普通51單片機(jī)的12倍。
(2)采用APB3外設(shè)總線結(jié)構(gòu)和SER寄存器內(nèi)存映射方式管理外設(shè),將外部擴(kuò)展的64 KB數(shù)據(jù)空間中的最高4 KB作為APB3外設(shè)的寄存器內(nèi)存映射地址,每個(gè)APB3外設(shè)占據(jù)256 B的地址,因此最多可添加16個(gè)外設(shè)。
(3)使用CoreConsole軟件以圖形化界面的方式添加Core8051S以及其他外設(shè),既直觀又方便。
圖3是以CoreConsole開(kāi)發(fā)的、基于Core805lS和APB3總線的50PC系統(tǒng)的典型架構(gòu)。該軟件的開(kāi)發(fā)流程與Altera公司基于NIOS Ⅱ處理器的soPc開(kāi)發(fā)流程類似,同時(shí)又具有其獨(dú)特優(yōu)勢(shì):在系統(tǒng)不復(fù)雜、控制部分遠(yuǎn)多于計(jì)算處理時(shí),使用Core805⊥s可靈活迅速地進(jìn)行開(kāi)發(fā),通過(guò)安裝ISA—Actel5 1為Keil提供調(diào)試驅(qū)動(dòng)可直接使用Keil編寫代碼并進(jìn)行在線程序調(diào)試,而優(yōu)化后的指令執(zhí)行速度可滿足大部分應(yīng)用的要求。
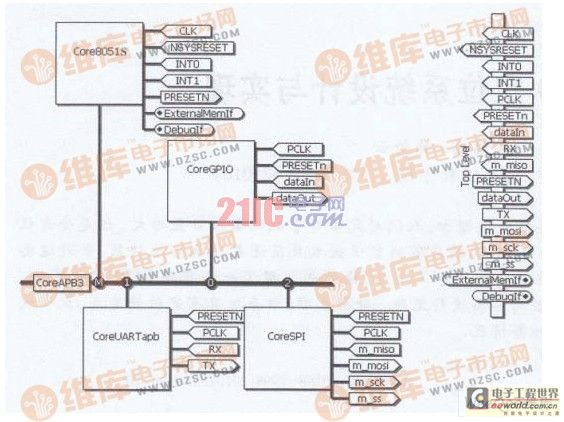
圖3 CoreConsole下基于Core8051S的開(kāi)發(fā)實(shí)例
本系統(tǒng)設(shè)計(jì)步驟:
(1)利用CoreConsole以圖形化方式設(shè)計(jì)片上系統(tǒng)所需的總線及外設(shè),包括SPI、PWM、GP10、UART等模塊;配置各模塊與APB3總線之間的連接關(guān)系,正確分配外設(shè)地址;然后生成.Ⅴ文件導(dǎo)人Actel集成開(kāi)發(fā)環(huán)境Libero。
(2)使用Libero的Flash Memory System Builder將Fu_S10n內(nèi)部的Flash模塊配置為Core8051S的外部程序空問(wèn)。如果有必要還可以將Fusi。n StartKit開(kāi)發(fā)板上的SRAM作為Core8051S的外部數(shù)據(jù)空間使用。
(3)將工程編譯綜合后下載到開(kāi)發(fā)板上,通過(guò)Keil編寫程序并進(jìn)行調(diào)試。
3、系統(tǒng)軟件設(shè)計(jì)
3.1車載控制系統(tǒng)軟件設(shè)計(jì)
車載系統(tǒng)是本系統(tǒng)的核心部分,它擔(dān)負(fù)著現(xiàn)場(chǎng)環(huán)境探測(cè),遠(yuǎn)距離數(shù)據(jù)傳輸以及未知區(qū)域檢測(cè)等重要功能。因此該部分的設(shè)計(jì)對(duì)可靠性和穩(wěn)定性要求較高。系統(tǒng)的軟件流程圖如圖4所示。
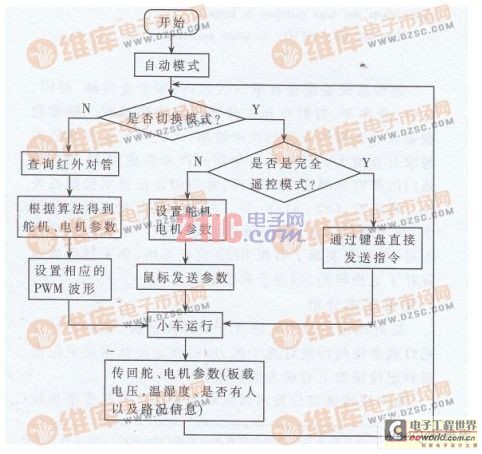
圖4車載控制系統(tǒng)流程圖
車載系統(tǒng)軟件包含兩部分功能:采集現(xiàn)場(chǎng)各種參數(shù)和實(shí)現(xiàn)各種運(yùn)行模式。通過(guò)溫濕度傳感器和人體紅外傳感器采集溫濕度值以及現(xiàn)場(chǎng)環(huán)境是否有人信號(hào);通過(guò)無(wú)線返;回參數(shù)決定當(dāng)前小車的運(yùn)行模式,包括自動(dòng)運(yùn)行模式、半遙控模式和全遙控模式。自動(dòng)運(yùn)行模式下小車會(huì)根據(jù)采集到的光電對(duì)管組信息分析當(dāng)前的路況,從而作出相應(yīng)運(yùn)行路徑修正處理;半遙控模式下通過(guò)鼠標(biāo)控制Windows界面的參數(shù)來(lái)控制小車的行動(dòng);全遙控模式下通過(guò)操控鍵盤可直接操控小車運(yùn)行。
車載系統(tǒng)自動(dòng)運(yùn)行時(shí),通過(guò)內(nèi)部算法進(jìn)行路徑選擇和障礙規(guī)避。由于光電對(duì)管組信息相對(duì)較少,故采用查表映射法進(jìn)行舵機(jī)電機(jī)驅(qū)動(dòng)控制,即將光電對(duì)管組采集到的信息進(jìn)行分類,根據(jù)不同的信息賦予小車不同的電機(jī)和舵機(jī)驅(qū)動(dòng)值,而光電對(duì)管組采集得到的信息為6 bit數(shù)據(jù),也就是數(shù)值為0~63,將其作為數(shù)組的下標(biāo),在數(shù)組內(nèi)容中根據(jù)下標(biāo)所表征的類型設(shè)置不同的經(jīng)驗(yàn)值,通過(guò)大量的運(yùn)行測(cè)試即可得到比較理想的參數(shù)。車載系統(tǒng)檢測(cè)到小障礙物時(shí),查表得到舵機(jī)電機(jī)參數(shù),轉(zhuǎn)過(guò)一定角度繞開(kāi)障礙物繼續(xù)運(yùn)行;檢測(cè)到較大障礙物且無(wú)法繞過(guò)時(shí),車載系統(tǒng)倒車回到安全區(qū)域繼續(xù)運(yùn)行。
由于光電對(duì)管組存在干擾信號(hào),在算法上進(jìn)行了如下濾波處理:利用記憶功能將前幾次的行進(jìn)路線保存,通過(guò)與當(dāng)前輸出狀態(tài)的比對(duì),判斷是否為干擾信息以決定是否摒棄當(dāng)前控制量。
以上算法保證了車載系統(tǒng)在運(yùn)行中出錯(cuò)概率降到最低。
3.2人機(jī)交互界面設(shè)計(jì)
A機(jī)交互界面是采用微軟基礎(chǔ)類(MFC)開(kāi)發(fā)的基于對(duì)活框架構(gòu)的應(yīng)用程序。采用CMSComm類處理中轉(zhuǎn)板與PC之間的串口通信,同時(shí)通過(guò)截獲軟件系統(tǒng)的消息傳遞函數(shù)來(lái)實(shí)現(xiàn)對(duì)鍵盤值的判斷。
本文詳細(xì)介紹了nRF24L01無(wú)線芯片的DPL和ACKPAYLOAD等功能,實(shí)現(xiàn)了車載系統(tǒng)與上位機(jī)之間的雙向通信,使用Actel公司的CoreConsole工具構(gòu)建SoPC片上系統(tǒng),同時(shí)設(shè)計(jì)了PC機(jī)上人機(jī)交互界面,完善了系統(tǒng)的運(yùn)行和控制,實(shí)現(xiàn)了具有實(shí)時(shí)數(shù)據(jù)傳送、自動(dòng)避障、遠(yuǎn)程操控等功能的智能探測(cè)系統(tǒng)。