
開(kāi)關(guān)電路中,,每個(gè)PIN二極管都有附隨的PIN二極管驅(qū)動(dòng)器或開(kāi)關(guān)驅(qū)動(dòng)器,,用來(lái)提供受控正向偏置電流、反向偏置電壓以及控制信號(hào)(通常是一個(gè)數(shù)字邏輯命令)與一個(gè)或多個(gè)PIN二極管之間的激活接口,。根據(jù)應(yīng)用需要,,可以采用分立設(shè)計(jì)或?qū)iTIC實(shí)現(xiàn)這種驅(qū)動(dòng)器功能。
另一方面,,也可以使用隨處可得的運(yùn)算放大器以及鉗位放大器,、差分放大器等特殊放大器作為備選方案,代替分立PIN二極管驅(qū)動(dòng)電路和昂貴的PIN二極管驅(qū)動(dòng)器IC,。此類運(yùn)算放大器具有寬帶寬,、高壓擺率和充裕的穩(wěn)態(tài)電流,可驅(qū)動(dòng)PIN二極管,。本文討論3種不同的PIN驅(qū)動(dòng)器電路,,它們采用運(yùn)算放大器或特殊放大器:AD8037、AD8137和ADA4858-3,。這些電路設(shè)計(jì)用于單刀雙擲(SPDT) PIN二極管開(kāi)關(guān),,但也可以對(duì)其進(jìn)行修改,以適合其他電路配置,。在詳細(xì)說(shuō)明這些電路之前,,本文將先討論P(yáng)IN二極管的特性和使用。
PIN二極管
PIN二極管用作電流控制電阻,,工作在RF和微波頻率,,正向偏置(“導(dǎo)通”)時(shí)其電阻只有幾分之一歐姆,反向偏置(“截止”)時(shí)其電阻高達(dá)10kΩ以上,。與典型的PN結(jié)二極管不同,,PIN二極管的P區(qū)與N區(qū)之間多了一層高阻性本征半導(dǎo)體材料(用PIN中的“I”表示),如圖1所示,。
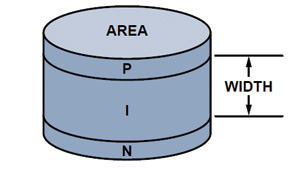
圖1 PIN二極管
當(dāng)PIN二極管正向偏置時(shí),,來(lái)自P材料的空穴和來(lái)自N材料的電子注入I區(qū)。電荷并不能立即完成重新合并,;電荷重新合并所需的有限時(shí)間量稱為“載流子生命周期”,。這導(dǎo)致I區(qū)中存在凈存儲(chǔ)電荷,因而其電阻會(huì)降至某一個(gè)值,,稱為二極管的有效導(dǎo)通電阻RS(見(jiàn)圖2a),。

圖2 PIN二極管等效電路:a) 導(dǎo)通,IBIAS >> 0,;b) 截止,,VBIAS ≤ 0
當(dāng)施加反向或零偏置電壓時(shí),,二極管呈現(xiàn)為一個(gè)大電阻RP,它與電容CT并聯(lián)(見(jiàn)圖2b),。通過(guò)改變二極管幾何結(jié)構(gòu),,可以使PIN二極管具有不同的RS和CT組合,以滿足各種電路應(yīng)用和頻率范圍的需要,。
驅(qū)動(dòng)器提供的穩(wěn)態(tài)偏置電流ISS和反向電壓共同決定RS和CT的最終值,。圖3和圖4顯示了典型PIN二極管系列——M/A-COM MADP 042XX8-13060系列硅二極管的參數(shù)關(guān)系。二極管材料會(huì)影響其特性,。例如,,砷化鎵(GaAs)二極管幾乎不需要反向偏置就能實(shí)現(xiàn)低CT值,如圖9所示,。

圖3 硅二極管導(dǎo)通電阻與正向電流的關(guān)系

圖4 硅二極管電容與反向電壓的關(guān)系
PIN二極管中存儲(chǔ)的電荷可以利用公式1進(jìn)行近似計(jì)算,。
 (1)
(1)
其中,QS為存儲(chǔ)的電荷,;τ為二極管載流子生命周期,;ISS為穩(wěn)態(tài)電流。
要導(dǎo)通或截止二極管,,必須注入或移除所存儲(chǔ)的電荷,。驅(qū)動(dòng)器的工作就是以極快的速度注入或移除所存儲(chǔ)的電荷。如果開(kāi)關(guān)時(shí)間小于二極管的載流子生命周期,,則可以利用公式2近似計(jì)算實(shí)現(xiàn)快速開(kāi)關(guān)所需的峰值電流(IP)。
 (2)
(2)
其中:t為所需的開(kāi)關(guān)時(shí)間,;ISS 為驅(qū)動(dòng)器所提供的穩(wěn)態(tài)電流,,用來(lái)設(shè)置PIN二極管導(dǎo)通電阻RS;τ為載流子生命周期,。
驅(qū)動(dòng)器注入或移除電流(或“尖峰電流”)i可以表示為公式3,。
 (3)
(3)
其中,C為驅(qū)動(dòng)器輸出電容(或“尖峰電容”)的值,;V為輸出電容上的電壓,;dv/dt為電容上的電壓的時(shí)間變化率。
PIN二極管偏置接口
將開(kāi)關(guān)驅(qū)動(dòng)器控制電路與PIN二極管相連,,以便通過(guò)施加正向或反向偏置來(lái)開(kāi)關(guān)二極管,,是一項(xiàng)具有挑戰(zhàn)性的工作。偏置電路通常使用一個(gè)低通濾波器,,位于RF電路與開(kāi)關(guān)驅(qū)動(dòng)器之間,。圖5顯示了一個(gè)單刀雙擲(SPDT)RF開(kāi)關(guān)及其偏置電路。當(dāng)設(shè)置妥當(dāng)時(shí),,濾波器L1/C2和L3/C4允許將控制信號(hào)施加于PIN二極管D1–D4,,控制信號(hào)與RF信號(hào)(從RF IN切換至PORT 1或PORT 2)的相互影響極少,。這些元件允許頻率相對(duì)較低的控制信號(hào)通過(guò)PIN二極管,但會(huì)阻止高頻信號(hào)逃離RF信號(hào)路徑,。不正常的RF能量損耗意味著開(kāi)關(guān)的插入損耗過(guò)高,。電容C1、C3和C5阻止施加于二極管的直流偏置侵入RF信號(hào)路徑中的電路,。直流接地回路中的電感L2允許直流和低頻開(kāi)關(guān)驅(qū)動(dòng)器信號(hào)輕松通過(guò),,但對(duì)于RF和微波頻率則會(huì)呈現(xiàn)高阻抗,從而降低RF信號(hào)損耗,。

圖5 典型單刀雙擲(SPDT)RF開(kāi)關(guān)電路
偏置電路,、RF電路和開(kāi)關(guān)驅(qū)動(dòng)器電路全都會(huì)發(fā)生交互影響彼此的性能,因此像所有設(shè)計(jì)一樣,,權(quán)衡考慮各種因素十分重要,。例如,較大的C2和C4(>20pF)對(duì)RF性能有利,,但對(duì)驅(qū)動(dòng)器則是麻煩,,因?yàn)榇箅娙輹?huì)導(dǎo)致上升沿和下降沿較慢??焖匍_(kāi)關(guān)對(duì)大多數(shù)應(yīng)用都有利,;因此,為了實(shí)現(xiàn)最優(yōu)驅(qū)動(dòng)器性能,,電容必須極小,,但為了滿足RF電路要求,電容又必須足夠大,。
傳統(tǒng)PIN二極管驅(qū)動(dòng)器
PIN二極管驅(qū)動(dòng)器有各種形狀和尺寸,。圖6給出了一個(gè)可提供高開(kāi)關(guān)速度的典型分立開(kāi)關(guān)驅(qū)動(dòng)器的原理圖。這種驅(qū)動(dòng)器既可以采用“片線”(混合)結(jié)構(gòu)來(lái)實(shí)現(xiàn),,也可以采用“表貼”(SMT)器件來(lái)實(shí)現(xiàn),;前者非常昂貴,后者雖不昂貴,,但需要的印刷電路板(PCB)面積多于混合結(jié)構(gòu),。

圖6 分立開(kāi)關(guān)驅(qū)動(dòng)器電路
還有專用開(kāi)關(guān)驅(qū)動(dòng)器集成電路(IC)。這些IC十分緊湊,,提供TTL接口,,并具有良好的性能,但靈活性有限,,而且往往很昂貴,。
還有一種開(kāi)關(guān)驅(qū)動(dòng)器架構(gòu)應(yīng)當(dāng)考慮,即采用運(yùn)算放大器,。運(yùn)算放大器開(kāi)關(guān)驅(qū)動(dòng)器的明顯優(yōu)勢(shì)在于其自身的靈活性,,可以輕松地對(duì)其進(jìn)行配置,,以適應(yīng)不同的應(yīng)用、電源電壓和條件,,為設(shè)計(jì)人員提供豐富的設(shè)計(jì)選項(xiàng),。
運(yùn)算放大器PIN二極管驅(qū)動(dòng)器
運(yùn)算放大器電路是一種很有吸引力的PIN二極管驅(qū)動(dòng)備選方案。除靈活性外,,這種電路常常還能以接近或超過(guò)1000V/μs的躍遷速度工作,。下面將介紹3種不同的RF PIN二極管放大器驅(qū)動(dòng)電路。所選放大器雖然在根本特征上各不相同,,但都能執(zhí)行類似的功能,。這些放大器電路可以驅(qū)動(dòng)硅或砷化鎵(GaAs)PIN二極管,但各有各的特點(diǎn),。
AD8037—鉗位放大器
該電路能以最高10MHz的頻率工作,,具有出色的開(kāi)關(guān)性能,總傳播延遲為15ns,。通過(guò)改變?cè)鲆婊蜚Q位電壓,,可以調(diào)整輸出電壓和電流,以適應(yīng)不同的應(yīng)用,。鉗位放大器AD8037原本設(shè)計(jì)用于驅(qū)動(dòng)ADC,,可提供鉗位輸出以保護(hù)ADC輸入不發(fā)生過(guò)驅(qū)。圖7所示配置用一對(duì)AD8037(U2和U3)驅(qū)動(dòng)PIN二極管,。

圖7 AD8037 PIN二極管驅(qū)動(dòng)器電路
本例中,,U2和U3采用同相配置,增益為4,。利用AD8037的獨(dú)特輸入鉗位特性,,可以實(shí)現(xiàn)極其干凈和精確的鉗位。它可以線性放大輸入信號(hào),,最高可達(dá)增益乘以正負(fù)鉗位電壓(VCH和VCL)。當(dāng)增益為4且鉗位電壓為±0.75V時(shí),,如果輸入電壓小于±0.75 V,,則輸出電壓等于輸入電壓的4倍;如果輸入電壓大于±0.75V,,則輸出電壓鉗位在最大值±3V,。這一鉗位特性使得過(guò)驅(qū)恢復(fù)非常快(典型值小于2ns),。鉗位電壓(VCH和VCL)由分壓器R2,、R3、R7和R8確定,。
數(shù)字接口由74F86 XOR邏輯門(U1)實(shí)現(xiàn),,它提供U2和U3所用的驅(qū)動(dòng)信號(hào),,兩路互補(bǔ)輸出之間的傳播延遲偏斜極小。電阻網(wǎng)絡(luò)R4,、R5,、R6和R9將TTL輸出電平轉(zhuǎn)換為大約±1.2V,然后通過(guò)R10和R12饋送給U2和U3,。
U2和U3的±1.2-V輸入提供60%過(guò)驅(qū),,以確保輸出會(huì)進(jìn)入鉗位狀態(tài)(4×0.75V)。因此,,硅PIN二極管驅(qū)動(dòng)器的輸出電平設(shè)為±3V,。電阻R16和R17限制穩(wěn)態(tài)電流。電容C12和C13設(shè)置PIN二極管的尖峰電流,。
AD8137—差分放大器
差分放大器(本例所用的AD8137)可以低成本提供出色的高速開(kāi)關(guān)性能,,并使設(shè)計(jì)人員能夠十分靈活地驅(qū)動(dòng)各種類型的RF負(fù)載。有各種各樣的差分放大器可供使用,,包括速度更快,、性能更高的一些器件。
高速差分放大器AD8137通常用于驅(qū)動(dòng)ADC,,但也可以用作低成本,、低功耗PIN二極管驅(qū)動(dòng)器。其典型開(kāi)關(guān)時(shí)間為7~11ns,,其中包括驅(qū)動(dòng)器和RF負(fù)載的傳播延遲,。它提供互補(bǔ)輸出,功能多樣,,可以替代昂貴的傳統(tǒng)驅(qū)動(dòng)器,。
圖8所示電路將單端TTL輸入(0~3.5V)轉(zhuǎn)換為互補(bǔ)±3.5V信號(hào),同時(shí)可使傳播延遲最小,。TTL信號(hào)放大4倍,,在AD8137輸出端產(chǎn)生所需的±3.5V擺幅。TTL信號(hào)的中點(diǎn)(或共模電壓)為1.75V,;必須將同樣的電壓施加于R2,,作為參考電壓VREF,以免在放大器輸出端引入共模失調(diào)誤差,。最好從一個(gè)低源阻抗驅(qū)動(dòng)此點(diǎn),;任何串聯(lián)阻抗都會(huì)增加到R1上,從而影響放大器增益,。

圖8 PIN二極管驅(qū)動(dòng)器原理圖
輸出電壓增益可由公式4計(jì)算:
 (4)
(4)
為正確端接脈沖發(fā)生器的輸入阻抗,,使之為50Ω,需要確定差分放大器電路的輸入阻抗,。這可以利用公式5計(jì)算,,得出RT=51.55Ω,,與之最接近的標(biāo)準(zhǔn)1%電阻值為51.1Ω。對(duì)于對(duì)稱的輸出擺幅,,兩個(gè)輸入網(wǎng)絡(luò)的阻抗必須相同,。這意味著,反相輸入阻抗必須將信號(hào)源的阻抗和端接電阻納入增益設(shè)置電阻R2,。
 (5)
(5)
圖8中,,R2約比R1大20Ω,以補(bǔ)償源電阻RS與端接電阻RT的并聯(lián)組合所引入的額外電阻(25Ω),。將R4設(shè)為1.02kΩ(最接近1.025kΩ的標(biāo)準(zhǔn)電阻值),,以確保兩個(gè)電阻比相等,避免引入共模誤差,。
輸出電平轉(zhuǎn)換很容易利用AD8137的VOCM引腳來(lái)實(shí)現(xiàn),,該引腳設(shè)置直流輸出共模電平。本例中,,VOCM引腳接地,,以提供關(guān)于地的對(duì)稱輸出擺幅。
電阻R5和R6設(shè)置穩(wěn)態(tài)PIN二極管電流見(jiàn)公式6,。
 (6)
(6)
電容C5和C6設(shè)置尖峰電流,,該電流有助于注入和移除PIN二極管中存儲(chǔ)的電荷??梢愿鶕?jù)特定二極管負(fù)載要求,,調(diào)整這些電容的值,實(shí)現(xiàn)性能優(yōu)化,。尖峰電流可以由公式7計(jì)算,。
 (7)
(7)
ADA4858-3—內(nèi)置電荷泵的三通道運(yùn)算放大器
許多應(yīng)用只提供一個(gè)電源,這常常令電路設(shè)計(jì)人員感到為難,,尤其是當(dāng)需要在PIN電路中提供低關(guān)斷電容時(shí),。這種情況下,硅或GaAs PIN二極管驅(qū)動(dòng)電路可以使用片上集成電荷泵的運(yùn)算放大器,,而不需要外部負(fù)電源,;其好處是可以顯著節(jié)省空間、功耗和預(yù)算,。
高速電流反饋型三通道放大器ADA4858-3就是這樣一種器件,它具有出色的特性,,片上集成電荷泵,,輸出擺幅可以達(dá)到地電壓以下3~1.8V(具體取決于電源電壓和負(fù)載)。該器件魯棒性很好,,可以真正為其他電路提供最高50mA的負(fù)電源電流,。
ADA4858-3為單電源系統(tǒng)中的互補(bǔ)PIN二極管微波開(kāi)關(guān)驅(qū)動(dòng)問(wèn)題提供了一種獨(dú)特的解決方案,。回顧圖4,,從中可以看出:即使很少量的反向偏置也有助于降低二極管電容CT,,具體取決于PIN二極管的類型。此類驅(qū)動(dòng)器對(duì)GaAs PIN二極管很有利,,因?yàn)檫@種二極管通常不需要很大的負(fù)偏置就能使關(guān)斷電容(CT)保持較小的值(見(jiàn)圖9),。

圖9 GaAs CT電容與電壓的關(guān)系
圖10所示電路用ADA4858-3作為PIN二極管驅(qū)動(dòng)器??梢栽谳斎攵嗽黾右粋€(gè)緩沖門,,使該電路兼容TTL或其他邏輯。對(duì)此電路的要求是將TTL 0V至3.5V輸入信號(hào)擺幅轉(zhuǎn)換為互補(bǔ)–1.5~+3.5V擺幅,,用于驅(qū)動(dòng)PIN二極管,。
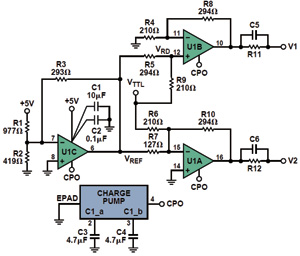
圖10 ADA4858-3用作PIN二極管驅(qū)動(dòng)器
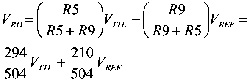
R1、R2,、R3和U1C形成該電路的–1.5V基準(zhǔn)電壓,,內(nèi)部負(fù)電壓CPO由片內(nèi)電荷泵產(chǎn)生。電容C3和C4是電荷泵工作所必需的,。負(fù)基準(zhǔn)電壓隨后通過(guò)分壓器(R5和R9)與VTTL輸入以無(wú)源方式合并,,所產(chǎn)生的電壓(VRD)出現(xiàn)在U1B的同相輸入端。U1B輸出電壓可以利用公式8計(jì)算,。
 (8)
(8)
其中:
 (9)
(9)
負(fù)基準(zhǔn)電壓也被饋送至放大器U1A,,在其中與TTL輸入合并,所得輸出電壓V2可以利用公式10計(jì)算,。
 (10)
(10)
這些放大器采用電流反饋架構(gòu),,因此必須注意反饋電阻的選擇,反饋電阻對(duì)于放大器的穩(wěn)定性和頻率響應(yīng)有著重要作用,。對(duì)于本應(yīng)用,,反饋電阻設(shè)為294Ω,這是數(shù)據(jù)手冊(cè)所推選的值,。輸出電壓V1和V2分別可以用公式8和公式10表示,。輸出尖峰電流量可以利用公式3和電容C5、C6上的電壓確定,。設(shè)置PIN二極管導(dǎo)通電阻的穩(wěn)態(tài)電流由R11與R12上的電壓差確定,,并取決于PIN二極管曲線和系統(tǒng)要求。
對(duì)于本應(yīng)用,,RF開(kāi)關(guān)負(fù)載為MASW210B-1硅PIN二極管單刀雙擲(SPDT)開(kāi)關(guān),,用于微波下變頻器的前端(見(jiàn)圖11)。

圖11 下變頻器功能框圖
開(kāi)關(guān)輸出波形和TTL輸入信號(hào)如圖12所示。請(qǐng)注意,,上升沿和下降沿非常陡峭,。由于開(kāi)關(guān)的開(kāi)關(guān)時(shí)間要求相對(duì)較慢(約為50ns),因此本應(yīng)用沒(méi)有使用尖峰電容C5和C6,。設(shè)置穩(wěn)態(tài)二極管電流的電阻R11和R12均為330Ω,。

圖12 顯示RF開(kāi)關(guān)速度的波形
圖13顯示了下變頻器前端的頻譜響應(yīng);開(kāi)關(guān)SW1位于固定位置,,以消除插入損耗,。請(qǐng)注意,圖中不存在諧波或邊帶,,充分表明沒(méi)有明顯的100 kHz開(kāi)關(guān)偽像從ADA4858-3片內(nèi)電荷泵散出,,這是在此類應(yīng)用中使用這些器件的重要考慮因素。
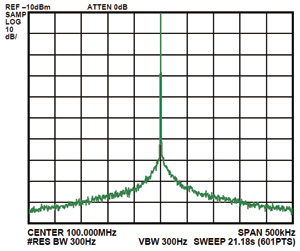
圖13 下變頻器的頻譜響應(yīng)
結(jié)論
以上三例說(shuō)明,,運(yùn)算放大器可以創(chuàng)造性地用作傳統(tǒng)放大器的替代方案,,其性能與PIN二極管專用驅(qū)動(dòng)IC相當(dāng)。此外,,運(yùn)算放大器可以提供增益調(diào)整和輸入控制功能,,而且當(dāng)使用內(nèi)置電荷泵的運(yùn)算放大器時(shí),無(wú)須負(fù)電源,,這就提高了PIN二極管的驅(qū)動(dòng)器和其他電路的設(shè)計(jì)靈活性,。運(yùn)算放大器易于使用和配置,可以相對(duì)輕松地解決復(fù)雜問(wèn)題,。