
摘? 要: 介紹了當(dāng)今國(guó)際上流行的幾種智能駕駛系統(tǒng),并分析了采用單一傳感器的駕駛系統(tǒng)中存在的問(wèn)題,給出了信息融合" title="信息融合">信息融合技術(shù)的原理和結(jié)構(gòu)。討論了多傳感器信息融合" title="多傳感器信息融合">多傳感器信息融合技術(shù)在智能駕駛系統(tǒng)(ITS)中的應(yīng)用算法及其有待進(jìn)一步解決的問(wèn)題。
關(guān)鍵詞: 貝葉斯估計(jì)? 信息融合? 障礙探測(cè)? 智能駕駛
?
隨著傳感器技術(shù)、信息處理技術(shù)、測(cè)量技術(shù)與計(jì)算機(jī)技術(shù)的發(fā)展,智能駕駛系統(tǒng)(輔助駕駛系統(tǒng)—無(wú)人駕駛系統(tǒng))也得到了飛速的發(fā)展。消費(fèi)者越來(lái)越注重駕駛的安全性與舒適性,這就要求傳感器能識(shí)別在同一車(chē)道上前方行駛的汽車(chē),并能在有障礙時(shí)提醒駕駛員或者自動(dòng)改變汽車(chē)狀態(tài),以避免事故的發(fā)生。國(guó)際上各大汽車(chē)公司也都致力于這方面的研究,并開(kāi)發(fā)了一系列安全駕駛系統(tǒng),如碰撞報(bào)警系統(tǒng)" title="報(bào)警系統(tǒng)">報(bào)警系統(tǒng)(CW)、偏向報(bào)警系統(tǒng)(LDW)和智能巡游系統(tǒng)(ICC)等。國(guó)內(nèi)在這些方面也有一定的研究,但與國(guó)外相比仍存在較大的差距。本文將主要討論多傳感器信息融合技術(shù)在智能駕駛系統(tǒng)(ITS)中的應(yīng)用。
1 ICC/CW和LDW系統(tǒng)中存在的問(wèn)題
1.1 ICC/CW系統(tǒng)中的誤識(shí)別問(wèn)題
ICC/CW系統(tǒng)中經(jīng)常使用單一波束傳感器。這類(lèi)傳感器利用非常狹窄的波束寬度測(cè)定前方的車(chē)輛,對(duì)于彎曲道路(見(jiàn)圖1(a)),前方車(chē)輛很容易駛出傳感器的測(cè)量范圍,這將引起智能巡游系統(tǒng)誤加速。如果前方車(chē)輛減速或在拐彎處另一輛汽車(chē)駛?cè)氡拒?chē)道,碰撞報(bào)警系統(tǒng)將不能在安全停車(chē)范圍內(nèi)給出響應(yīng)而容易產(chǎn)生碰撞。類(lèi)似地,當(dāng)彎曲度延伸時(shí)(見(jiàn)圖1(b)),雷達(dá)系統(tǒng)易把鄰近道路的車(chē)輛或路邊的防護(hù)欄誤認(rèn)為是障礙而給出報(bào)警。當(dāng)?shù)缆凡黄教箷r(shí),雷達(dá)傳感器前方的道路是斜向上,小丘或土堆也可能被誤認(rèn)為是障礙,這些都降低了系統(tǒng)的穩(wěn)定性。現(xiàn)在有一些濾波算法可以處理這些問(wèn)題[6]并取得了一定效果,但不能徹底解決。
?

?
1.2?LDW系統(tǒng)中存在的場(chǎng)景識(shí)別問(wèn)題
LDW系統(tǒng)中同樣存在公共駕駛區(qū)場(chǎng)景識(shí)別問(wèn)題。LDW系統(tǒng)依賴(lài)于一側(cè)的攝像機(jī)(經(jīng)常僅能測(cè)道路上相鄰車(chē)輛的位置),很難區(qū)分彎曲的道路和做到多樣的個(gè)人駕駛模式。LDW系統(tǒng)利用一個(gè)前向攝像機(jī)探測(cè)車(chē)輛前方道路的地理狀況,這對(duì)于遠(yuǎn)距離測(cè)量存在著精確性的問(wèn)題,所有這些都影響了TLC(Time-to-Line-Crossing)測(cè)量的準(zhǔn)確性。現(xiàn)常用死區(qū)識(shí)別和駕駛信息修訂法進(jìn)行處理,但并不能給出任何先驗(yàn)知識(shí)去識(shí)別故障。
2 多傳感器信息融合技術(shù)在ITS系統(tǒng)中的應(yīng)用
針對(duì)以上系統(tǒng)存在的一些問(wèn)題,研究者們紛紛引入了多傳感器信息融合技術(shù),并提出了不同的融合算法。基于視覺(jué)系統(tǒng)的傳感器可以提供大量的場(chǎng)景信息,其它傳感器(如雷達(dá)或激光等)可以測(cè)定距離、范圍等信息,對(duì)兩方面的信息融合處理后能夠給出更可靠的識(shí)別信息。融合技術(shù)可以采用 Beaurais 等人于1999年提出的CLARK算法(Combined Likelihood Adding Radar)[3]和Institude Neuroinformatik提出的ICDA(Integrative Coupling of Different Algorithms)[4]算法等方法實(shí)現(xiàn)。
2.1 傳感器的選擇
識(shí)別障礙的首要問(wèn)題是傳感器的選擇,下面對(duì)幾種傳感器的優(yōu)缺點(diǎn)進(jìn)行說(shuō)明(見(jiàn)表1)。探測(cè)障礙的最簡(jiǎn)單的方法是使用超聲波傳感器,它是利用向目標(biāo)發(fā)射超聲波脈沖,計(jì)算其往返時(shí)間來(lái)判定距離的。該方法被廣泛應(yīng)用于移動(dòng)機(jī)器人的研究上。其優(yōu)點(diǎn)是價(jià)格便宜,易于使用,且在10m以?xún)?nèi)能給出精確的測(cè)量。不過(guò)在ITS系統(tǒng)中除了上文提到的場(chǎng)景限制外,還有以下問(wèn)題。首先因其只能在10m以?xún)?nèi)有效使用,所以并不適合ITS系統(tǒng)。另外超聲波傳感器的工作原理基于聲速,即使可以使之測(cè)達(dá)100m遠(yuǎn),但其更新頻率為2Hz,而且還有可能在傳輸中受到其它信號(hào)的干擾,所以在CW/ICC系統(tǒng)中使用是不實(shí)際的。
?

?
視覺(jué)傳感器在CW系統(tǒng)中使用得非常廣泛。其優(yōu)點(diǎn)是尺寸小,價(jià)格合理,在一定的寬度和視覺(jué)域內(nèi)可以測(cè)定多個(gè)目標(biāo),并且可以利用測(cè)量的圖像根據(jù)外形和大小對(duì)目標(biāo)進(jìn)行分類(lèi)。但是算法復(fù)雜,處理速度慢。
雷達(dá)傳感器在軍事和航空領(lǐng)域已經(jīng)使用了幾十年。主要優(yōu)點(diǎn)是可以魯棒地探測(cè)到障礙而不受天氣或燈光條件限制。近十年來(lái)隨著尺寸及價(jià)格的降低,在汽車(chē)行業(yè)開(kāi)始被使用。但是仍存在性?xún)r(jià)比的問(wèn)題。
為了克服這些問(wèn)題,利用信息融合技術(shù)提出了一些新的方法,諸如參考資料[5~6]所述的融合超聲波傳感器和圖像傳感器的信息、融合雷達(dá)與圖像信息或激光與圖像信息等。利用這些方法可以得到較單一傳感器更為可靠的探測(cè)。
2.2 信息融合的基本原理[1]
所謂信息融合就是將來(lái)自多個(gè)傳感器或多源的信息進(jìn)行綜合處理,從而得出更為準(zhǔn)確、可靠的結(jié)論。多傳感器信息融合是人類(lèi)和其它生物系統(tǒng)中普遍存在的一種基本功能,人類(lèi)本能地具有將身體上的各種功能器官(眼、耳、鼻、四肢)所探測(cè)的信息(景物、聲音、氣味和觸覺(jué))與先驗(yàn)知識(shí)進(jìn)行綜合的能力,以便對(duì)其周?chē)沫h(huán)境和正在發(fā)生的事件做出估計(jì)。由于人類(lèi)的感官具有不同度量特征,因而可測(cè)出不同空間范圍的各種物理現(xiàn)象,這一過(guò)程是復(fù)雜的,也是自適應(yīng)的。它將各種信息(圖像、聲音、氣味和物理形狀或描述)轉(zhuǎn)化成對(duì)環(huán)境的有價(jià)值的解釋。
多傳感器信息融合實(shí)際上是人對(duì)人腦綜合處理復(fù)雜問(wèn)題的一種功能模擬。在多傳感器系統(tǒng)中,各種傳感器提供的信息可能具有不同的特征:時(shí)變的或者非時(shí)變的,實(shí)時(shí)的或者非實(shí)時(shí)的,模糊的或者確定的,精確的或者不完整的,相互支持的或者互補(bǔ)的。多傳感器信息融合就像人腦綜合處理信息的過(guò)程一樣,它充分利用多個(gè)傳感器資源,通過(guò)對(duì)各種傳感器及其觀測(cè)信息的合理支配與使用,將各種傳感器在空間和時(shí)間上的互補(bǔ)與冗余信息依據(jù)某種優(yōu)化準(zhǔn)則組合起來(lái),產(chǎn)生對(duì)觀測(cè)環(huán)境的一致性解釋或描述。信息融合的目標(biāo)是基于各種傳感器分離觀測(cè)信息,通過(guò)對(duì)信息的優(yōu)化組合導(dǎo)出更多的有效信息。這是最佳協(xié)同作用的結(jié)果,它的最終目的是利用多個(gè)傳感器共同或聯(lián)合操作的優(yōu)勢(shì)來(lái)提高整個(gè)系統(tǒng)的有效性。
2.3 常用信息融合算法
信息融合技術(shù)涉及到多方面的理論和技術(shù) ,如信號(hào)處理、估計(jì)理論、不確定性理論、模式識(shí)別、最優(yōu)化技術(shù)、神經(jīng)網(wǎng)絡(luò)和人工智能等。由不同的應(yīng)用要求形成的各種方法都是融合方法的一個(gè)子集。表2歸納了一些常用的信息融合方法。
?

?
2.4 智能駕駛系統(tǒng)中信息融合算法的基本結(jié)構(gòu)
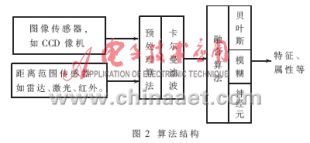
由于單一傳感器的局限性,現(xiàn)在ITS系統(tǒng)中多使用一組傳感器探測(cè)不同視點(diǎn)的信息,再對(duì)這些信息進(jìn)行融合處理,以完成初始目標(biāo)探測(cè)識(shí)別。在智能駕駛系統(tǒng)中識(shí)別障礙常用的算法結(jié)構(gòu)如圖2所示。
?
?
3 CLARK算法
CLARK算法是用于精確測(cè)量障礙位置和道路狀況的方法,它同時(shí)使用來(lái)自距離傳感器(雷達(dá))和攝像機(jī)的信息。CLARK算法主要由以下兩部分組成:①使用多傳感器融合技術(shù)對(duì)障礙進(jìn)行魯棒探測(cè);②在LOIS(Likelihood of Image Shape)道路探測(cè)算法中綜合考慮上述信息,以提高遠(yuǎn)距離道路和障礙的識(shí)別性能。
3.1 用雷達(dá)探測(cè)" title="雷達(dá)探測(cè)">雷達(dá)探測(cè)障礙
????目前經(jīng)常使用一個(gè)雷達(dá)傳感器探測(cè)前方的車(chē)輛或障礙。如前面所分析,雷達(dá)雖然在直路上的性能良好,但當(dāng)?shù)缆窂澢鷷r(shí),探測(cè)的信號(hào)將不完全可靠,有時(shí)還會(huì)有探測(cè)的盲點(diǎn)或產(chǎn)生錯(cuò)誤報(bào)警。為了防止錯(cuò)誤報(bào)警,常對(duì)雷達(dá)的輸出進(jìn)行標(biāo)準(zhǔn)卡爾曼(Kalman)濾波,但這并不能有效解決探測(cè)盲點(diǎn)問(wèn)題。為了更可靠地解決這類(lèi)問(wèn)題,可以使用掃描雷達(dá)或多波束" title="多波束">多波束雷達(dá),但其價(jià)格昂貴。這里選用低價(jià)的視覺(jué)傳感器作為附加信息,視覺(jué)傳感器經(jīng)常能提供掃描雷達(dá)和多波束雷達(dá)所不能提供的信息。
3.2 在目標(biāo)識(shí)別中融合視覺(jué)信息
CLARK算法使用視覺(jué)圖像的對(duì)比度和顏色信息探測(cè)目標(biāo),使用矩形模板方法識(shí)別目標(biāo)。這個(gè)模板由具有不同左右邊界和底部尺寸的矩形構(gòu)成,再與視覺(jué)圖像對(duì)比度域匹配,選擇與雷達(dá)傳感器輸出最接近的障礙模板。
CLARK算法首先對(duì)雷達(dá)信號(hào)進(jìn)行卡爾曼濾波,用于剔除傳感器輸出的強(qiáng)干擾,這由下列狀態(tài)和觀測(cè)方程處理:

式中,R(t)為前方障礙的真實(shí)距離(未知), 是其速度(未知),D(t)為距離觀測(cè)值,Δt為兩次觀測(cè)的間隔時(shí)間,w(t)和v(t)為高斯噪聲。給定D(t),由Kalman濾波器估計(jì)R(t)和
是其速度(未知),D(t)為距離觀測(cè)值,Δt為兩次觀測(cè)的間隔時(shí)間,w(t)和v(t)為高斯噪聲。給定D(t),由Kalman濾波器估計(jì)R(t)和 的值,并把估計(jì)值
的值,并把估計(jì)值 作為距離輸入值,使用
作為距離輸入值,使用 和D(t)的差值確定所用矩形模板的偏差。由于使用雷達(dá)探測(cè)的位置與雷達(dá)波的中心位置總有一個(gè)偏差,可通過(guò)改變道路一側(cè)的位置作為補(bǔ)償。
和D(t)的差值確定所用矩形模板的偏差。由于使用雷達(dá)探測(cè)的位置與雷達(dá)波的中心位置總有一個(gè)偏差,可通過(guò)改變道路一側(cè)的位置作為補(bǔ)償。
使用上述算法可以有效提高雷達(dá)探測(cè)的可靠性,但當(dāng)圖像包含很強(qiáng)的邊緣信息或障礙只占據(jù)相平面一個(gè)很小的區(qū)域時(shí),仍不能得到滿(mǎn)意的結(jié)果。因此,除對(duì)比度外,又引入視覺(jué)圖像的顏色域。
3.3 相合似然法
在探測(cè)到障礙后,CLARK算法將這些信息整合到道路探測(cè)算法(LOIS)中。LOIS利用變形道路的邊緣應(yīng)為圖像中對(duì)比度的最大值部分且其方位應(yīng)垂直于道路邊緣來(lái)搜索道路。如果只是簡(jiǎn)單地將兩個(gè)信息整合,則障礙探測(cè)部分的像素被隱藏,其圖像梯度值不會(huì)影響LOIS的似然性。這樣可以防止LOIS將汽車(chē)前方障礙的邊緣誤認(rèn)為是道路的邊緣來(lái)處理。但是當(dāng)?shù)缆返恼鎸?shí)邊緣非常接近障礙的邊緣時(shí),隱藏技術(shù)則失效。
為了使隱藏技術(shù)有效,可以在障礙和道路探測(cè)之間采取折中的處理方法。這種折中的處理方法就是相合似然法。它將探測(cè)障礙固定的位置和尺寸參數(shù)變?yōu)榭梢栽谛》秶鷥?nèi)變化的參數(shù)。新的似然函數(shù)由LOIS的似然和探測(cè)障礙的似然融合而成。它使用七維參數(shù)探測(cè)方法(三維用于障礙,四維用于道路),能同時(shí)給出障礙和道路預(yù)測(cè)的最好結(jié)果。其公式如下:
式中,Tb、Tl、Tw為相平面內(nèi)矩形模板的底部位置、左邊界和寬度的三個(gè)變形參數(shù),[xr(t),xc(t)]為變形模板相平面的中心。[yr(t),yc(t)]為由雷達(dá)探測(cè)并經(jīng)Kalman濾波的障礙在相平面的位置。將地平面壓縮變換為相平面,σr2(t)為 的實(shí)時(shí)估計(jì),σc2為相平面內(nèi)一個(gè)路寬的值(3.2m)。tan-1的壓縮比率在相平面內(nèi)不小于Tmin(路寬的一半),不大于Tmax(路寬)。通過(guò)求解七維后驗(yàn)pdf P(k’,b’LEFT,b’RIGHT,vp,Tb,Tl,Tw|[yr(t),yc(t)],Observed Image)的最大值獲得障礙和道路目標(biāo)。
的實(shí)時(shí)估計(jì),σc2為相平面內(nèi)一個(gè)路寬的值(3.2m)。tan-1的壓縮比率在相平面內(nèi)不小于Tmin(路寬的一半),不大于Tmax(路寬)。通過(guò)求解七維后驗(yàn)pdf P(k’,b’LEFT,b’RIGHT,vp,Tb,Tl,Tw|[yr(t),yc(t)],Observed Image)的最大值獲得障礙和道路目標(biāo)。
3.4 CLARK算法的局限性
CLARK算法假定障礙為矩形形狀且其最小尺寸為標(biāo)準(zhǔn)路寬的一半,所以當(dāng)障礙為客車(chē)、貨車(chē)、拖拉機(jī)及公共汽車(chē)時(shí)滿(mǎn)足要求;但當(dāng)障礙為摩托車(chē)、自行車(chē)及行人時(shí)就不適用了。這種矩形形狀的假設(shè)也要求雷達(dá)為窄波束雷達(dá),對(duì)其它寬波束雷達(dá)、掃描雷達(dá)或多波束雷達(dá)則無(wú)效,并假定探測(cè)障礙的偏向位置總是在雷達(dá)波束的中心。
多傳感器信息融合技術(shù)在智能駕駛系統(tǒng)(ITS)中的使用極大地提高了系統(tǒng)的穩(wěn)定性和安全性,各種融合算法也都從不同方面更好地改善了系統(tǒng)的性能,但目前仍存在如何降低成本的問(wèn)題,這對(duì)于ITS系統(tǒng)的普遍使用是很重要的。另外降低運(yùn)算量、增強(qiáng)對(duì)多目標(biāo)識(shí)別的可靠性也都有待進(jìn)一步研究解決。
?
參考文獻(xiàn)
1 何 友,王國(guó)宏.多傳感器信息融合及應(yīng)用.北京:電子工業(yè)出版社, 2000
2 康耀紅.數(shù)據(jù)融合理論及應(yīng)用.西安:西安電子科技大學(xué)出版社, 1997
3 M. Beauvais, S. Lakshmanan CLARK.A Heterogeneous Sensor Fusion Method for Finding Lanes and Obstacles.
? Image and Vision Computing,2000(18): 397~413
4 U.Handmann,T.Kalinke,C.Tzomakas, M.Werner,W.v.Seelen. An Image Processing System for Driver Assistance. Image?and Vision Computing,2000(18):367~376
5 B. Heisele, H. Neef, W. Ritter, R. Schneider, G. Wanielik.Object Detection in Traffic Scenes by a Color Video and? Radar Data Fusion Approach. Proceedings of the First IEEE Australian Data Fusion? Symposium,1996: 48~52
6 H. Araki, K. Yamada,Y. Hiroshima, T. Ito. Development of Rear-end? Collision Avoidance System. Proceedings of?the IEEE Intelligent Vehi-cles Symposium.1996:224~229