
摘要:針對光電搜索偵察系統(tǒng)報告搜索到的空中目標當前方位、俯仰位置給后端武器打擊系統(tǒng)的需要,在光電搜索系統(tǒng)與后端武器打擊系統(tǒng)之間建立大地坐標系是解決此類問題的較好方法,以便后端武器打擊系統(tǒng)指向搜索到的空中目標。介紹了數(shù)字電子羅盤HMR3000的接口特性,給出了HMR3000的控制編程以及與DSP的接口電路,同時也給出了HMR3000電子羅盤獲取光電搜索系統(tǒng)平臺方位軸系相對地理正北的獲取流程和編程實現(xiàn)方法以及DSP端相關程序。結(jié)果表明系統(tǒng)坐標系建立精度達到±0.5°,重復精度達到±0.1°,且能穩(wěn)定運行。
關鍵詞:RS422;數(shù)字電子羅盤;光電搜索偵察系統(tǒng);DSP;NMEA標準;微處理器
美國Honeywell公司生產(chǎn)的數(shù)字羅盤模塊HMR3000使用磁阻傳感器和兩軸傾斜傳感器來提供航向信息,帶有電子常平架的羅盤即使傾斜40°也能給出精確的航向。該電子羅盤廣泛應用于航海、航天、測量系統(tǒng)等領域。HMR3000內(nèi)部全部使用表面貼裝元件,不含有任何的移動元件,所以非常可靠和堅固。這個低功耗、小體積的裝置帶有非鐵磁性金屬外殼,便于安裝固定在任何一個平臺上。允許用戶對羅盤的輸出進行組態(tài),包括3類NMEA標準信息(HDG、 HDT和XDR),3類專用語句(HPR、RCD和CCD)。該模塊內(nèi)置微處理器控制傳感器的測量順序,控制器操作的參數(shù)存儲在EEPROM中,輸出的語句滿足NMEA0813標準。
光電搜索偵察系統(tǒng)與后端武器打擊系統(tǒng)通過有線或無線連接時,兩個系統(tǒng)往往處于地球上不同的位置,如何將光電搜索系統(tǒng)搜索到的空中目標方位、俯仰位置傳遞到后端武器打擊系統(tǒng),成為后端武器打擊系統(tǒng)有效打擊目標的關鍵。一般而言,兩個系統(tǒng)安裝處于地球的水平面且有機械或電子調(diào)平裝置,這樣空中目標的俯仰位置對兩個系統(tǒng)平臺而言是相同的。但空中目標對于兩個系統(tǒng)平臺方位而言卻存在不同,基于地理正北固定不變原理,通過獲取系統(tǒng)相對地理正北順時針夾角,即可將光電搜索偵察系統(tǒng)指向目標的方位值報告給后端武器打擊系統(tǒng)。
電子羅盤在工程中獲得了廣泛的應用,文獻給出了基于單片機高級語言HMR3000編程的探討,文獻給出了電子羅盤在載體上實時跟蹤地球同步衛(wèi)星的案例。安裝于光電偵察搜索系統(tǒng)平臺上的電子羅盤HMP3000具備航向輸出信息,根據(jù)文獻給出的航向輸出語句的格式及校正方法對電子羅盤進行有效編程及校正,可以獲取系統(tǒng)相對地理正北順時針夾角。通過考慮不同地區(qū)磁北的差異設計計算正北夾角的方法去完整實現(xiàn)地理正北沿順時針相對系統(tǒng)指向夾角的獲取。
1 HMR3000的硬件接口設計
1.1 功能特性
數(shù)字電子羅盤HMR3000可以為導航定位系統(tǒng)提供航向、俯仰、橫滾等數(shù)據(jù)。其中航向的精度為±0.5°,分辨率為±O.10°。HMR3000有4種工作模式:連續(xù)、選通、睡眠和校準。HMR3000可在連續(xù)和選通模式下工作。在連續(xù)模式下,HMR3000以可組態(tài)的速率輸出羅盤主動提供的NMEA標準信息,而在選通模式下,則根據(jù)用戶控制電路的申請輸出。
1.2 控制特性
HMR3000電子羅盤控制特性如表1所示。

1.3 通信協(xié)議
對于HMR3000有兩類輸入:對于輸出語句的請求,或設定一個組態(tài)參數(shù);對于所有有效的輸入,HMR3000都送出一個響應,帶有正確的檢查總數(shù)的值。 HMR3000輸出語句有3種標準的和3種專用的NMEA信息,以連續(xù)模式從HMR3000發(fā)送出來。HMR3000的串行通信是根據(jù)NMEA0813標準制定的簡單的、異步ASCII協(xié)議。可以使用RS232或RS485接口電路。ASCII碼的傳輸和接收使用1位停止位,8位數(shù)據(jù)位(低位在先)、無奇偶校驗位(MSB永遠為0)和1位停止位。每一個碼有10位。波特率可以選擇1200,2 400,4800.9 600或19 200。HMR3000支持NMEA0183和專用的信息。
1.4 接口硬件設計
1.4.1 電子羅盤信號接口定義
HMR3000采用標準的RS232接口,其信號定義如表2所示。
1.4.2 硬件接口設計
電子羅盤與DSP接口電路如圖1所示。電子羅盤有兩個電源輸入端,硬件設計時選擇第9腳未穩(wěn)壓的電源作為輸入,通過7812穩(wěn)壓電源模塊把+15 V電源變?yōu)?12 V從第9腳輸入。若選擇穩(wěn)壓的第8腳+5 V電源作為輸入的話,對電源的紋波、精度、穩(wěn)定度都有很高的要求,稍有不慎就可能燒掉電子羅盤。
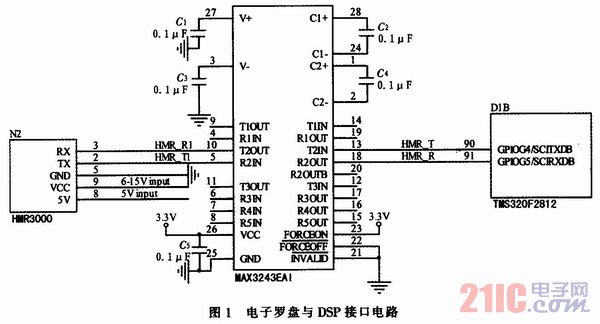
電子羅盤RS232接口的RXD、TXD信號通過專門的RS232接口轉(zhuǎn)換器MAX3243EAI來實現(xiàn)與DSP的RS232(DSP有A口、B口,這里選B口)接口的連接。
MAX3243EAI在33 V電源能穩(wěn)健工作,這樣就兼顧了DSP的33V信號電平。MAX3243EAI引腳FORCEIN,F(xiàn)ORCEOFF,INVALID分別接高、低、低電平。在試驗時發(fā)現(xiàn)這3個引腳不連接,DSP與羅盤的通信存在極大的不可靠性,并有死機現(xiàn)象。
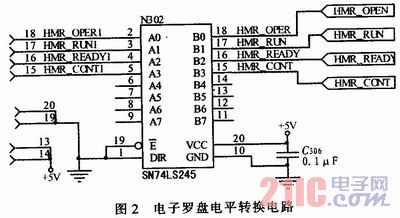
電子羅盤標定時用到的信號要經(jīng)過電平轉(zhuǎn)換以實現(xiàn)與DSP的I/O信號的連接。DSP的信號電平為3.3 V,電子羅盤的信號是5 V,故選用SN74LS245實現(xiàn)電平轉(zhuǎn)換,其電路連接如圖2所示。
2 接口軟件設計
2.1 具體應用
開發(fā)的便攜式紅外搜索跟蹤儀主要用來向指揮控制系統(tǒng)或后端武器打擊系統(tǒng)報告空中來襲目標(如飛機、導彈等),從而對來襲目標實施有效打擊。便攜式紅外跟蹤儀與后端武器打擊系統(tǒng)及前端指揮系統(tǒng)針對來襲目標位置的融合需要依賴統(tǒng)一的大地地理坐標系,安裝于系統(tǒng)的羅盤指向與系統(tǒng)的方位軸系存在固有的關系,依據(jù)電子羅盤的特性,可以有效獲取大地地理正北指向沿順時針相對電子羅盤指向的夾角。
2.2 DSP初始化
TI公司DSP TMS320F2812的RS232接口有2個:A、B接口。利用B接口作為羅盤通信用。B接口被I/O接口與RS232接口復用,故DSP初始化時需將該接口設置為RS232接口。根據(jù)文獻,DSP初始化(該口波特率、數(shù)據(jù)傳輸格式初始化略)該接口部分代碼如下:
GpioMuxRegs.GPGMUX.a(chǎn)ll=0x0030;//設置G4/SCITXDB,G5/SCIRXDB為第二功能接口
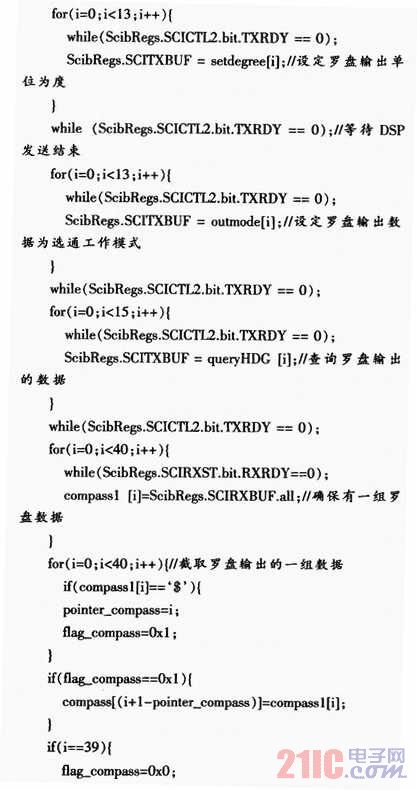
2.3 電子羅盤接口軟件在DSP端的實現(xiàn)
電子羅盤正向與地理正北夾角獲取流程如圖3所示。
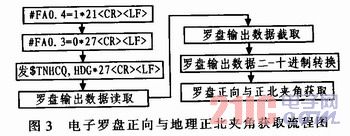
通過DSP的SCI-B接口與電子羅盤通信,遵循標準RS232協(xié)議,1個起始位,8個數(shù)據(jù)位,1個停止位。設定通信波特率為19 200 b/s。DSP首先發(fā)送“#FA0.4=1*21
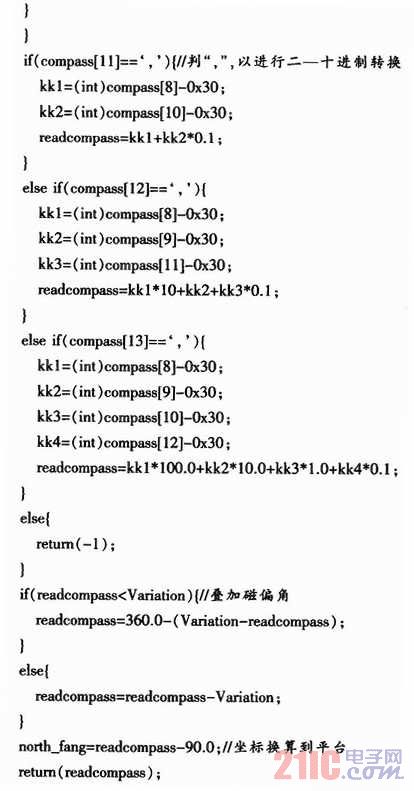
2.4 獲取平臺相對地理正北夾角計算
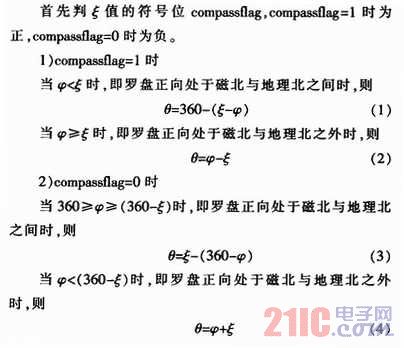
為了獲得羅盤正向與地理北的夾角值,存在一定的換算關系。機械安裝保證羅盤正向與光軸指向一致,如存在偏向角,則還需疊加偏向角。我國除烏魯木齊、南沙群島、曾母暗沙群島磁偏角位于磁北偏東以外,其他地區(qū)均處于磁北偏西。系統(tǒng)歸零時,假定磁北(圖4指示磁北在地理北以西,也可能在地理北以東)、地理北、光軸指向如圖4所示。同時假定磁偏角為ζ,羅盤正向與磁北夾角為ψ(角度以磁北順時針命名,即磁航向),獲取的羅盤正向與地理正北夾角為θ(相對地理北順時針命名,即真航向)。根據(jù)每個地區(qū)ζ值的不同采用上位軟件命令輸入方式。磁北偏在地理北以西時,ζ為正值,磁北偏在地理北以東時,ζ為負值。設計時ζ始終取為正,但以標志作為正、負判斷,則存在以下判據(jù):

3 結(jié)論
HMR3000與外界通信若采用通常的匯編語言,其控制處理的靈活性差,而且語言本身的可移植性差。采用DSP高級語言處理克服了以上的缺點。以上利用高級語言處理的HMR3000部分接口程序在CCS 2.21環(huán)境下編譯通過,其獲取平臺相對地理正北重復精度達±0.1°,且速度快,并在開發(fā)的項目中穩(wěn)定運行。系統(tǒng)穩(wěn)定運行需要注意磁場對電子羅盤的干擾。