
摘? 要: 介紹CAN控制器SJA1000的特點(diǎn)、內(nèi)部結(jié)構(gòu)以及SJA1000的寄存器結(jié)構(gòu)及地址分配;CAN協(xié)議通信格式。并以獨(dú)立CAN控制器SJA1000為例,結(jié)合CAN協(xié)議說明了一種通用型CAN總線的開發(fā)與設(shè)計(jì)。
關(guān)鍵詞:? CAN總線? SJA1000? 單片機(jī)
?
1 SJA1000簡介
SJA1000是PHILIPS公司早期CAN控制器PCA82C200的替代品,功能更強(qiáng),具有如下特點(diǎn):
①完全兼容PCA82C200及其工作模式,即BASIC CAN模式;
②具有擴(kuò)展的接收緩沖器,64字節(jié)的FIFO結(jié)構(gòu);
③支持CAN2.0B;
④支持11位和29位識(shí)別碼;
⑤位速率可達(dá)1Mbit/s;
⑥支持peliCAN模式及其擴(kuò)展功能;
⑦24MHz的時(shí)鐘頻率" title="時(shí)鐘頻率">時(shí)鐘頻率;
⑧支持與不同微處理器的接口;
⑨可編程的CAN輸出驅(qū)動(dòng)配置;
⑩增強(qiáng)了溫度范圍(-40℃~+125℃)。
2 SJA1000內(nèi)部結(jié)構(gòu)
SJA1000的內(nèi)部結(jié)構(gòu)如圖1所示,主要由接口管理邏輯IML、信息緩沖器(含發(fā)送緩沖器TXB和接收緩沖器RXFIFO)、位流處理器BSP、接收過濾器ASP、位時(shí)序處理邏輯BTL、錯(cuò)誤管理邏輯EML、內(nèi)部振蕩器及復(fù)位電路等構(gòu)成。IML接收來自CPU的命令,控制CAN寄存器的尋址并向主控器提供中斷信息及狀態(tài)信息。CPU的控制經(jīng)IML把要發(fā)送的數(shù)據(jù)寫入TXB,TXB中的數(shù)據(jù)由BSP處理后經(jīng)BTL輸出到CAN BUS。BTL始終監(jiān)視CAN BUS,當(dāng)檢測到有效的信息頭“隱性電平-控制電平”的轉(zhuǎn)換時(shí)啟動(dòng)接收過程,接收的信息首先要由位流處理器BSP處理,并由ASP過濾,只有當(dāng)接收的信息的識(shí)別碼與ASP檢驗(yàn)相符時(shí),接收信息才最終被寫入RXB或RXFIFO中。RXFIFO最多可以緩存64字節(jié)的數(shù)據(jù),該數(shù)據(jù)可被CPU讀取。EML負(fù)責(zé)傳送層中調(diào)制器的錯(cuò)誤管制,它接收BSP的出錯(cuò)報(bào)告,促使BSP和IML進(jìn)行錯(cuò)誤統(tǒng)計(jì)。
?

?
3 SJA1000的寄存器結(jié)構(gòu)及地址分配
表1是工作在BASIC CAN模式下的SJA1000的寄存器結(jié)構(gòu)及地址分配表。CAN控制器工作模式的設(shè)定、數(shù)據(jù)的發(fā)送和接收等都是通過這些寄存器來實(shí)現(xiàn)的。時(shí)鐘分頻寄存器OCR用于設(shè)定SJA1000工作于BASIC CAN還是PeliCAN,還用于CLKOUT引腳輸出時(shí)鐘頻率的設(shè)定,在上電初始化控制器時(shí)必須首先設(shè)定;在工作模式下,控制寄存器" title="控制寄存器">控制寄存器CR用于控制CAN控制器的行為,可讀可寫;命令寄存器CMR只能寫;狀態(tài)寄存器SR只能讀;而IR、ACR、AMR、BTR0、BTR1、OCR在工作模式下讀寫無意義。通常,在系統(tǒng)初始化時(shí),先使CR.0=1,SJA1000進(jìn)入復(fù)位模式。在此模式下IR、ACR、AMR、BTR0、BTR1及OCR均可讀可寫,此時(shí)設(shè)置相應(yīng)的初值。當(dāng)退出復(fù)位模式時(shí),SJA1000即按復(fù)位時(shí)設(shè)定的相應(yīng)情況工作于工作模式,除非再次使芯片復(fù)位,否則上次設(shè)定的值不變。當(dāng)需要發(fā)送信息時(shí),若發(fā)送緩沖器空閑,由CPU控制信息寫入TXB,再由CMR控制發(fā)送;當(dāng)接收緩沖器RXFIFO未滿且接收信息通過了ASP,則接收到的信息被寫入RXFIFO。可通過兩種方法讀取接收到的信息。一種方法是,在中斷被使能的情況下,由SJA1000向CPU發(fā)中斷信號(hào),CPU通過SR及IR可以識(shí)別該中斷,并讀取數(shù)據(jù)釋放接收緩沖器;另一種方法是直接讀取SR,查詢RXFIFO的狀態(tài),當(dāng)有信息接收時(shí),讀取該信息并釋放接收緩沖器。當(dāng)接收緩沖器中有多條信息時(shí),當(dāng)前的信息被讀取后,接收緩沖器有效信號(hào)會(huì)再次有效,通過中斷方式或查詢方式可以再次讀取信息,直到RXFIFO中的信息被全部讀出為止。當(dāng)RXFIFO已滿,如還有信息被接收,此接收信息不被保存,且發(fā)出相應(yīng)的緩沖器溢出信號(hào)供CPU讀取處理。
?

?
4 CAN協(xié)議通信格式
CAN協(xié)議通信格式中有四種幀格式:數(shù)據(jù)幀" title="數(shù)據(jù)幀">數(shù)據(jù)幀、遠(yuǎn)程幀、出錯(cuò)幀和超載幀。其中數(shù)據(jù)幀和遠(yuǎn)程幀的發(fā)送需要在CPU控制下進(jìn)行,而出錯(cuò)幀和超載幀的發(fā)送則是在錯(cuò)誤發(fā)生或超載發(fā)生時(shí)自動(dòng)進(jìn)行的。因此人們更關(guān)心前兩個(gè)幀的結(jié)構(gòu)。數(shù)據(jù)幀結(jié)構(gòu)如圖2所示。
?

?
一個(gè)完整的數(shù)據(jù)幀格式,除仲裁場、控制場、數(shù)據(jù)場外都是CAN控制器發(fā)送數(shù)據(jù)時(shí)自動(dòng)加上去的,而仲裁場、控制場、數(shù)據(jù)場則必須由CPU控制給出。用SJA1000時(shí),寫出發(fā)送緩沖器的TXID0、TXID1即設(shè)定了相應(yīng)的仲裁場和控制場。TXID0即為仲裁場的高8位,TXID1的高3位為仲裁場的低3位,仲裁場共11位。TXID1的第5位為RTR位,即遠(yuǎn)程請(qǐng)求位,在數(shù)據(jù)幀中為“0”;TXID1低四位標(biāo)示數(shù)據(jù)場所含字節(jié)數(shù)的多少,稱為DLC。RTR與DLC共同構(gòu)成控制場。發(fā)送的數(shù)據(jù)組成數(shù)據(jù)場,最多不超過8個(gè)字節(jié)。遠(yuǎn)程幀與數(shù)據(jù)幀的形式差別在于沒有數(shù)據(jù)場。除此形式上的差別外,在遠(yuǎn)程幀中RTR位須置“1”,表示請(qǐng)求數(shù)據(jù)源節(jié)點(diǎn)向它的目的節(jié)點(diǎn)(即發(fā)送遠(yuǎn)程幀的節(jié)點(diǎn))發(fā)送數(shù)據(jù)。源節(jié)點(diǎn)接收到該幀后,把要發(fā)送數(shù)據(jù)用數(shù)據(jù)幀發(fā)給目的節(jié)點(diǎn),完成數(shù)據(jù)請(qǐng)求。CRC場與ACK場都是在低層次上為提高傳輸?shù)目煽啃远詣?dòng)進(jìn)行的。任何幀與幀之間是幀間空間。
5 設(shè)計(jì)實(shí)例
5.1 整體設(shè)計(jì)思路
這里用SJA1000與AT89C51芯片設(shè)計(jì)一種具有通用性的工業(yè)測控系統(tǒng),系統(tǒng)的結(jié)構(gòu)圖如圖3所示。
?
?
CAN總線是一種多主總線,理論上任何一個(gè)節(jié)點(diǎn)都可以作為主節(jié)點(diǎn)。在本系統(tǒng)中設(shè)置與上位PC機(jī)相連的節(jié)點(diǎn)1和節(jié)點(diǎn)2為上位節(jié)點(diǎn),其它節(jié)點(diǎn)為底層節(jié)點(diǎn)。在任務(wù)比較簡單的系統(tǒng)中,也可以只設(shè)置一臺(tái)上位PC機(jī),PC機(jī)通過串口與節(jié)點(diǎn)上的CPU通信,CPU再與CAN控制器SJA1000通信,實(shí)現(xiàn)信息在CAN BUS上的發(fā)送與接收。節(jié)點(diǎn)1與節(jié)點(diǎn)2的結(jié)構(gòu)相同,而底層節(jié)點(diǎn)根據(jù)應(yīng)用的不同具有不同的功能。但它們都具有與CAN BUS通信的能力,上傳數(shù)據(jù)和接收數(shù)據(jù)" title="接收數(shù)據(jù)">接收數(shù)據(jù)。
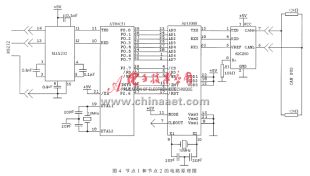
5.2 電路原理圖
節(jié)點(diǎn)1與節(jié)點(diǎn)2的原理圖如圖4所示。AT89C51通過MAX232與PC機(jī)串行通信。設(shè)置SJA1000工作于Intel模式,由PC機(jī)發(fā)送的數(shù)據(jù)寫入AT89C51,再通過P0口及控制信號(hào)將數(shù)據(jù)寫入SJA1000并通過CAN收發(fā)器發(fā)送。接收數(shù)據(jù)是通過中斷進(jìn)行的,CAN BUS的數(shù)據(jù)經(jīng)CAN接口芯片82C250接收并寫入SJA1000的RXFIFO,然后通過中斷提請(qǐng)CPU讀取。讀取的數(shù)據(jù)由RS232口上傳送給PC機(jī)。
在本系統(tǒng)中其它節(jié)點(diǎn)不與PC機(jī)通信,此時(shí)AT89C51除與SJA1000相接的口線外還剩余口線,可以做其它用途。如用于數(shù)據(jù)的采集,則與A/D轉(zhuǎn)換芯片相接即可;如與控制相關(guān),則與控制口相接即可,這樣一來可以靈活地構(gòu)成各種系統(tǒng)。
?
?
5.3 軟件設(shè)計(jì)
該系統(tǒng)的軟件設(shè)計(jì)" title="軟件設(shè)計(jì)">軟件設(shè)計(jì)分為兩方面:(1)PC機(jī)軟件設(shè)計(jì),可以用VC++、VB,也可以使用工控軟件完成。如只用于監(jiān)視系統(tǒng),設(shè)計(jì)的重點(diǎn)在于PC機(jī)與節(jié)點(diǎn)之間的通信。(2)節(jié)點(diǎn)上CPU的軟件設(shè)計(jì)。不論是節(jié)點(diǎn)1、2或是其它底層節(jié)點(diǎn),都要用到CAN通信,因此都要設(shè)置CAN控制器。其初始化的流程圖如圖5所示。
?

?
具體的例程如下:
MOV DPTR,#CR????? ;控制寄存器CR的地址送DPTR
MOV A,#01H
MOVX @DPTR,A????? ??? ;進(jìn)入復(fù)位模式
MOV DPTR,#CDR
MOV A,#00H
MOVX @DPTR,A? ;選擇BASIC CAN模式、時(shí)鐘不輸出
MOV A,#NODECODE
MOVX @DPTR,A????? ;節(jié)點(diǎn)號(hào)NODECODE寫入ACR
MOVX DPTR,#AMR
MOV A,#00H
MOV @DPTR,A??????? ;AMR置為0,當(dāng)且僅當(dāng)RXID0=ACR時(shí)接收數(shù)據(jù)。
MOV DPTR,#BTR0 ???????????? ;設(shè)定總線時(shí)序寄存器BTR0,系統(tǒng)采用12MHz晶振
MOV A,#85H??????? ????????? ;分頻后總線時(shí)鐘頻率為2MHz
MOVX @DPTR,A??????????????? ;同步跳轉(zhuǎn)寬度為3tscl
MOV DPTR,#BTR1????????????? ;設(shè)定總線時(shí)序寄存器BTR1
MOV A,#0B4H???????????????? ;位同步時(shí)間為1個(gè)tscl,采樣開始位置TSEG1=5tscl
MOVX @DPTR,A??? ??????????? ;TSEG2=4tscl,每一位時(shí)間10tscl(200kHz),每位采樣3次
MOV DPTR,#OCR???? ????????? ;設(shè)置輸出控制寄存器
MOV A,#1AH??????????????????;數(shù)據(jù)從TX0按正常輸出模式同極性輸出
MOV @DPTR,A???????????????? ;TX1 不用
MOV DPTR,#CR????????????????;初始化完成,使控制器退出復(fù)位模式,進(jìn)入工作模式工作。
??? MOV A,#06H?
??? MOV @DPTR,A?
??? 該初始化程序使SJA1000工作在 BASIC CAN模式下,CAN總線位速率為200kHz。根據(jù)總線傳輸?shù)木嚯x不同速度可以調(diào)整。為提高其抗干擾性能,還可以在SJA1000與CAN總線收發(fā)器之間加光隔。各節(jié)點(diǎn)CPU的其它軟件設(shè)計(jì)應(yīng)視節(jié)點(diǎn)的功能而定,不再贅述。
該系統(tǒng)用于城市區(qū)域交通中心信息采集及處理,已取得很好效果。由于傳輸距離較遠(yuǎn),設(shè)定速率為10kHz,但可靠性較強(qiáng),系統(tǒng)成本低廉。
CAN總線以其優(yōu)良的性能使其應(yīng)用方興未艾,以SJA1000為控制器構(gòu)成各種CAN總線系統(tǒng)方便、簡單、成本低廉,這也是開發(fā)與應(yīng)用其它CAN總線產(chǎn)品的基礎(chǔ)。
?
參考文獻(xiàn)
1 鄔寬明.CAN總線原理和應(yīng)用系統(tǒng)設(shè)計(jì). 北京:北京航空航天大學(xué),2001. 3
2 DATA SHEET SJA1000 CAN Stand-alone controller.?PHILIPS Semiconductors 公司, 2000.4
3 王東威,顧宏,洪義平.基于CAN總線的安全巡檢系統(tǒng)的信息采集及處理.電子產(chǎn)品世界, 2002(4)