
摘要:衛(wèi)星重力測(cè)量技術(shù)的應(yīng)用對(duì)于地球重力場(chǎng)的反演具有劃時(shí)代的意義,是當(dāng)今大地測(cè)量領(lǐng)域的研究前沿和關(guān)注熱點(diǎn)之一,我國(guó)目前在該領(lǐng)域研究尚屬起步階段。文章介紹了重力衛(wèi)星測(cè)量系統(tǒng)的組成,研究了GPS相對(duì)定位與定時(shí)在重力衛(wèi)星K波段測(cè)距系統(tǒng)(KBR)微米級(jí)測(cè)距中的作用,給出了利用雙頻 GPS相對(duì)定位與定時(shí)結(jié)果修正KBR測(cè)距的方案,并通過(guò)仿真實(shí)際應(yīng)用對(duì)該方案進(jìn)行驗(yàn)證。驗(yàn)證結(jié)果表該方案可達(dá)到重力衛(wèi)星測(cè)量的要求。
關(guān)鍵詞:重力衛(wèi)星;K波段測(cè)距系統(tǒng)(KBR);雙頻;相對(duì)定位;定位精度
地球重力場(chǎng)是地球的一個(gè)基本物理場(chǎng),重力場(chǎng)及其變化反映了地球表層及其內(nèi)部的物質(zhì)分布和運(yùn)動(dòng),決定了大地水準(zhǔn)面的起伏和變化,地球重力場(chǎng)的精確測(cè)量對(duì)大地測(cè)量、地球物理、地球動(dòng)力學(xué)和海洋學(xué)等學(xué)科的發(fā)展具有極其重要的意義。衛(wèi)星重力測(cè)量技術(shù)的應(yīng)用對(duì)于地球重力場(chǎng)的測(cè)量具有劃時(shí)代的意義,是當(dāng)今大地測(cè)量領(lǐng)域的研究前沿和關(guān)注熱點(diǎn)之一。常規(guī)的重力場(chǎng)確定方法主要依靠地面重力觀測(cè),地面
觀測(cè)周期較長(zhǎng),且占地球四分之三的海洋重力數(shù)據(jù)缺乏,確定重力場(chǎng)的精度受到限制。隨著空間定位技術(shù)的發(fā)展,近年來(lái)在地球重力場(chǎng)研究方面所取得的成就遠(yuǎn)遠(yuǎn)超出過(guò)去30年的總和。20世紀(jì)80年代出現(xiàn)的衛(wèi)星測(cè)高技術(shù)較大地提高了重力場(chǎng)的確定精度,如著名的EGM96模型。2000年7月由德國(guó)GFZ發(fā)射的重力衛(wèi)星GHAMP,邁出了衛(wèi)星重力測(cè)量的重要一步。2002年3月由美國(guó)宇航局和歐洲聯(lián)合發(fā)射的低跟蹤衛(wèi)星GRACE,采用KBR雙向測(cè)距,同時(shí)利用雙頻 GPS定位、測(cè)時(shí)結(jié)果修正KBR測(cè)距,使得測(cè)距精度達(dá)到幾十微米,距離變率測(cè)定精度達(dá)到0.1 μm/s。此外,歐洲空間局也在2009年3月份成功發(fā)射了GOCE重力梯度衛(wèi)星,衛(wèi)星重力測(cè)量得到了空前的發(fā)展。但是,我國(guó)目前對(duì)重力衛(wèi)星的研究處于起步階段,重力衛(wèi)星星間高精度測(cè)距技術(shù)也在重點(diǎn)攻關(guān)之中。為此,文章主要介紹雙頻GPS接收機(jī)在重力衛(wèi)星星問(wèn)高精度測(cè)距中不可或缺的作用,并提出一種利用雙頻GPS觀測(cè)量進(jìn)行修正KBR測(cè)距的工程化方案,為我國(guó)后期的衛(wèi)星重力探測(cè)計(jì)劃提供工程參考。
1 測(cè)量系統(tǒng)組成
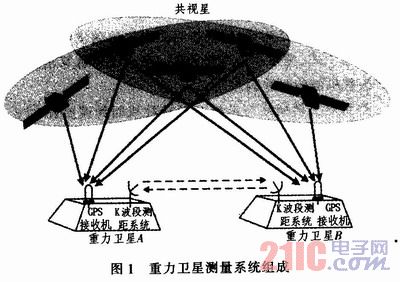
整個(gè)重力衛(wèi)星星座由兩顆相距200 km,軌道高度500 km的衛(wèi)星組成,每顆衛(wèi)星都搭載了高精度雙頻GPS接收機(jī)、K/Ka雙波段(24/32 GHz)測(cè)距系統(tǒng)和高精度的時(shí)鐘等(每顆衛(wèi)星上搭載的GPS接收機(jī)和KBR的時(shí)間標(biāo)準(zhǔn)采用同一個(gè)振蕩器)如圖l所示。兩星間精密測(cè)距的基本思路是:首先利用K波段測(cè)距系統(tǒng)(KBR)對(duì)兩星之間的距離進(jìn)行測(cè)量。與此同時(shí),A星和B星利用其各自的可視GPS導(dǎo)航星進(jìn)行絕對(duì)定位與定時(shí),再通過(guò)共視GPS導(dǎo)航星進(jìn)行相對(duì)定位與定時(shí),并利用GPS相對(duì)定位與定時(shí)結(jié)果修正KBR測(cè)距,使其測(cè)距精度達(dá)到微米級(jí)。
2 GPS定位結(jié)果修正KBR測(cè)距
2.1 KBR雙向測(cè)距及時(shí)間同步誤差
重力衛(wèi)星A和B間通過(guò)KBR系統(tǒng)進(jìn)行精密雙向測(cè)距,其測(cè)距原理如下。
重力衛(wèi)星A在理想真實(shí)時(shí)刻t對(duì)重力衛(wèi)星B載波信號(hào)的觀測(cè)量可以表示為:

式中,trA、trB分別為重力衛(wèi)星A和B的KBR時(shí)標(biāo);CA(tr)、CB(tt)分別為重力衛(wèi)星A和B在信號(hào)接收時(shí)刻和發(fā)射時(shí)刻的鐘差;dCA(tr)、dCB(tr)分別為重力衛(wèi)星A和重力衛(wèi)星B在接收時(shí)刻的鐘漂。鐘漂對(duì)KBR相位的影響僅僅發(fā)生在信號(hào)發(fā)射至接收這一時(shí)段 (r≈0.7 ms),只要鐘漂達(dá)到10-10,就可以達(dá)到1/1000周的測(cè)相精度,因此,影響測(cè)相精度的主要誤差是時(shí)標(biāo)ttA、trB的同步誤差。
2.2 雙頻GPS觀測(cè)量修正KBR測(cè)距誤差
對(duì)重力衛(wèi)星星座而言,為滿(mǎn)足幾百公里空間分辨率的重力場(chǎng)測(cè)定精度,要求兩顆衛(wèi)星之間的測(cè)距精度可達(dá)到幾個(gè)微米。衛(wèi)星的KBR采用32.7/24.5 GHz頻率信號(hào)(波長(zhǎng)約1 cm),為此,測(cè)相精度必須達(dá)到千分之一周(1/1 024)。經(jīng)調(diào)制后的差頻信號(hào)分別為502和670 kHz,為保證1O-4周的測(cè)相精度,定時(shí)精度應(yīng)達(dá)到10-4/670 kHz=150 ps(O.15 ns),這一精度對(duì)在軌振蕩器而言幾乎是不可能的。利用IGS產(chǎn)品,采用精密定軌(POD)技術(shù),可確定KBR測(cè)量的絕對(duì)時(shí)標(biāo)和衛(wèi)星的位置,位置精度可達(dá)到2~3 cm,測(cè)時(shí)精度可達(dá)到0.1 ns,可滿(mǎn)足KBR時(shí)標(biāo)的要求,因此,GPS地面數(shù)據(jù)處理系統(tǒng)是KBR達(dá)到微米級(jí)精度的關(guān)鍵技術(shù)之一。重力衛(wèi)星星載GPS接收機(jī)承擔(dān)的主要任務(wù)在于:
1)利用GPS確定的載體衛(wèi)星厘米級(jí)精度攝動(dòng)軌道恢復(fù)長(zhǎng)波長(zhǎng)項(xiàng)的重力場(chǎng);
2)利用GPS絕對(duì)定時(shí)結(jié)果消除星載振蕩器的長(zhǎng)期鐘漂;
3)利用GPS相對(duì)定時(shí)結(jié)果校準(zhǔn)K波段測(cè)距的同步誤差,精度為0.1 ns(3 cm)。
總體上,相對(duì)定位和相對(duì)定時(shí)采用事后處理方案,以GPS雙頻載波相位觀測(cè)值為基本觀測(cè)量,輔以載波相位平滑偽距,動(dòng)力學(xué)平滑等多種處理手段,獲得模糊度固定坐標(biāo)解。首先對(duì)觀測(cè)數(shù)據(jù)進(jìn)行質(zhì)量檢測(cè),修正載波相位可能發(fā)生的周跳,剔除具有粗差的觀測(cè)值。以一天觀測(cè)弧段為處理單元,前后延伸3 h,即前一天21:00至第二天的3:00,共30 h,以便內(nèi)插GPS衛(wèi)星IGS精密星歷。
采用載波相位相對(duì)定位的關(guān)鍵是正確確定整周模糊度,采用整數(shù)解可以提高坐標(biāo)解的穩(wěn)定性和精度。但是,為了消除電離層誤差,必須采用L3組合,而L3不具備整數(shù)解。測(cè)相偽距雙差觀測(cè)方程(以距離表示)可以化為:
式中,實(shí)質(zhì)上就是雙差寬波模糊度,具有整數(shù)特性,如果能夠通過(guò)其他途徑固定,那么在L3中的模糊度未知數(shù)只存在L1的雙差模糊度,而且應(yīng)為整數(shù),其系數(shù)正好等于窄波的波長(zhǎng)(11 cm),這樣就將L3轉(zhuǎn)化為具有整數(shù)模糊度估計(jì)的觀測(cè)模型。寬波雙差模糊度可以由寬波雙差和Melbourne-Wubbena組合聯(lián)合求解。
由于載波相位測(cè)量的精度遠(yuǎn)高于偽距測(cè)量精度,因而高精度時(shí)間同步可以通過(guò)載波相位測(cè)量來(lái)實(shí)現(xiàn)。相對(duì)定時(shí)則采用單差模式,由于接收機(jī)鐘差的存在,很難獲得單差模糊度的整數(shù)解。為此,首先進(jìn)行精密相對(duì)定位,獲得1~2 cm精度的差分定位結(jié)果和基線方差。其次將基線結(jié)果作為具有先驗(yàn)精度信息的坐標(biāo)參數(shù)代入單差觀測(cè)方程,從而解算出高精度的相對(duì)鐘差。
兩星載GPS接收機(jī)間的載波相位單差觀測(cè)方程可表示為:

式中,為測(cè)量殘差,為星載GPS接收機(jī)A的位置坐標(biāo)修正向量,為星載GPS接收機(jī)A與星載GPS接收機(jī)B間的時(shí)鐘偏差,為單差模糊度。
由式(7)即可得到兩星載GPS接收機(jī)間的時(shí)鐘偏差:

利用雙差載波相位進(jìn)行精密相對(duì)定位獲得GPS接收機(jī)A的位置坐標(biāo)修正向量,將其作為具有先驗(yàn)精度信息的坐標(biāo)參數(shù)代入上式,搜索出單差模糊度,即可解算出兩星載GPS接收機(jī)間的時(shí)鐘偏差。
然而由于模糊度與星載GPS接收機(jī)時(shí)鐘誤差及GPS衛(wèi)星鐘差是耦合的,單差方程僅僅消除了GPS衛(wèi)星鐘差的影響,星載GPS接收機(jī)起始相位未知的問(wèn)題仍然存在,因而單差模糊度無(wú)法以整周的形式求解。為此,需對(duì)單差方程進(jìn)行重新整合,假設(shè)選取第r顆GPS衛(wèi)星為參考星,以上角標(biāo)ref表示,則式(8)可以寫(xiě)成:
通過(guò)上述重新整合后,式中的變?yōu)殡p差模糊度,滿(mǎn)足模糊度整周特性,可以利用整周模糊度搜索方法進(jìn)行搜索,其中參考星的雙差模糊度變?yōu)榱悖鋯尾钅:仁且粋€(gè)不變的量,可以通過(guò)最小二乘估算出來(lái)。
在研究精密相對(duì)定時(shí)時(shí),還需要考慮參考站的絕對(duì)鐘差對(duì)相對(duì)定時(shí)的影響,因此還可以先考慮求解參考站的絕對(duì)鐘差。目前JPL利用地面高精度時(shí)間參考基準(zhǔn)確定的GRACE衛(wèi)星絕對(duì)鐘差精度達(dá)到O.1 ns,在絕對(duì)定時(shí)過(guò)程中,還要考慮相對(duì)論的影響。
通過(guò)以上過(guò)程便可利用GPS相對(duì)定位和定時(shí)結(jié)果消除星載振蕩器的長(zhǎng)期鐘漂同時(shí)校準(zhǔn)K波段測(cè)距的同步誤差,使KBR測(cè)距達(dá)到微米級(jí)。
3 仿真器試驗(yàn)驗(yàn)證
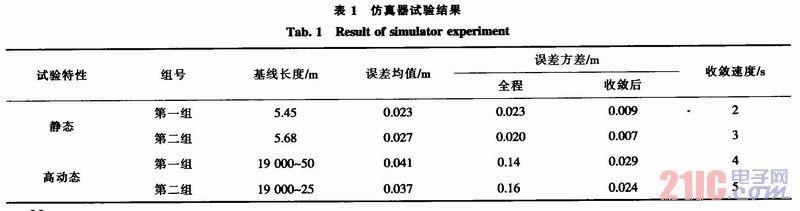
為了驗(yàn)證以上方法的可行性和定位精度,設(shè)計(jì)了仿真器靜態(tài)和高動(dòng)態(tài)試驗(yàn)。用雙頻接收機(jī)接收仿真器雙頻數(shù)據(jù),用雙頻相對(duì)定位軟件對(duì)原始觀測(cè)數(shù)據(jù)進(jìn)行處理并與理論值進(jìn)行對(duì)比,驗(yàn)證精度。試驗(yàn)方法如圖2所示。各試驗(yàn)的相對(duì)測(cè)量結(jié)果如表l所示。

3.1 靜態(tài)試驗(yàn)
為驗(yàn)證該雙頻相對(duì)測(cè)量算法的性能,首先利用靜態(tài)定基線試驗(yàn)對(duì)其驗(yàn)證。試驗(yàn)共兩組,仿真器輸出靜態(tài)定基線雙頻信號(hào),利用雙頻相對(duì)定位軟件對(duì)原始觀測(cè)量進(jìn)行后處理,處理結(jié)果與理論數(shù)據(jù)對(duì)比,其結(jié)果如圖3和圖4所示。
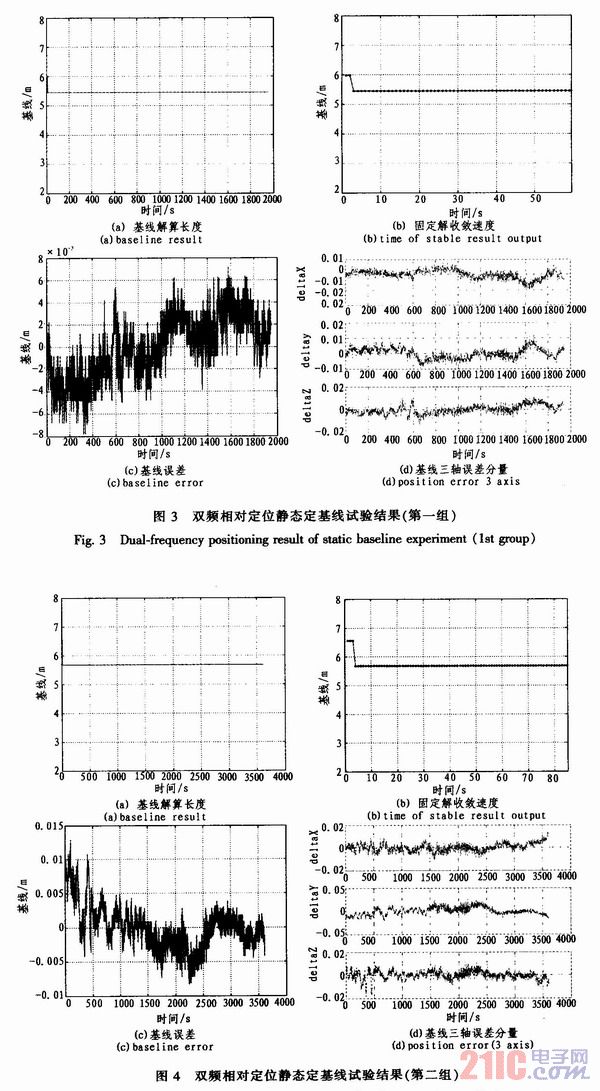
由以上2組試驗(yàn)分析結(jié)果可以看出,利用該雙頻相對(duì)定位軟件可以穩(wěn)定地進(jìn)行基線解算,基線解算結(jié)果與理論值一致,固定解收斂后誤差可以控制在2 cm以?xún)?nèi)。從圖3(a)、圖4(a)可以看出,初始幾個(gè)歷元的基線解算誤差較大,這是由于浮點(diǎn)解尚未收斂,且由于靜態(tài)條件下載波相位雙差觀測(cè)方程法方程病態(tài)性,小的測(cè)量誤差就會(huì)帶來(lái)較大的定位誤差。隨著觀測(cè)歷元的增加,法方程的病態(tài)性得到改善,浮點(diǎn)解逐漸收斂于穩(wěn)定的實(shí)數(shù)解。在浮點(diǎn)解收斂、模糊度整數(shù)解固定后,便可得到穩(wěn)定的高精度的解算結(jié)果,且精度均小于1 cm。
3.2 高動(dòng)態(tài)試驗(yàn)
為驗(yàn)證該雙頻相對(duì)測(cè)量算法在高動(dòng)態(tài)條件下的性能,設(shè)計(jì)了高動(dòng)態(tài)試驗(yàn)。利用仿真器高動(dòng)態(tài)軌道驗(yàn)證算法在高動(dòng)態(tài)下的性能,和雙頻相對(duì)定位軟件對(duì)原始觀測(cè)量進(jìn)行處理,處理結(jié)果與理論數(shù)據(jù)對(duì)比,其結(jié)果如圖5和圖6所示。

通過(guò)高動(dòng)態(tài)試驗(yàn)可以發(fā)現(xiàn)利用雙頻GPS精密相對(duì)測(cè)量算法可以穩(wěn)定地進(jìn)行基線解算,解算結(jié)果與理論值一致。在定位收斂后,該算法能穩(wěn)定地輸出高精度的相對(duì)定位結(jié)果,且誤差方差均小于3 cm。
4 結(jié)論
地球重力場(chǎng)的精確測(cè)量對(duì)大地測(cè)量、地球物理、地球動(dòng)力學(xué)和海洋學(xué)等學(xué)科的發(fā)展具有極其重要的意義,高精密的GPS相對(duì)定位和定時(shí)是保證KBR測(cè)距精度,進(jìn)而保證地球重力場(chǎng)測(cè)量空間分辨力的基本前提。文章通過(guò)分析重力衛(wèi)星KBR測(cè)距任務(wù)中星載GPS的作用設(shè)計(jì)了一種工程化應(yīng)用的雙頻組合方法,并給出適用于實(shí)際工程的解模糊度方法,通過(guò)仿真器試驗(yàn)驗(yàn)證無(wú)論在靜態(tài)還是在高動(dòng)態(tài)條件下該方法解算收斂時(shí)間均小于5 s,解算穩(wěn)定后定位精度均小于3 cm,從而可以滿(mǎn)足利用GPS結(jié)果修正KBR測(cè)距的要求。