你曾經(jīng)玩過一種當你偏離賽道時手柄發(fā)出震動警示的電視賽車游戲嗎?如果玩過,你便已經(jīng)對觸覺界面有了感觀的認識。觸覺這個詞來自希臘語haptikos, 意識是抓住或感知。通過觸覺機器人,用戶可以感覺到遙遠的或虛擬的環(huán)境。觸覺界面給用戶真實的觸覺反饋,讓用戶可以感受到那些并非直接接觸的事物。例如,觸覺界面讓你能夠感覺到模擬飛行方向盤的阻力,而觸覺反饋能讓飛行員知道該使多大的力氣。
觸覺研究其中一個尖端前沿區(qū)域叫做“被動觸覺”一般的觸覺界面都是主動感知,意思是系統(tǒng)使用電機和風力等動力設備增加用戶感知到的系統(tǒng)作用力。主動觸覺系統(tǒng)的風險在于,動力設備可能會增加過多的作用力,而傷害到用戶。被動觸覺界面設計有安全選項,使用被動動力設備例如采用磁流變剎車將系統(tǒng)作用力消除,而不是給系統(tǒng)添加作用力。被動觸覺界面不僅僅只是安全,也更加節(jié)能。
美國佐治亞州技術研究院智能機器動力實驗室(IMDL)的研究人員正在研究被動觸覺系統(tǒng)的用途。Wayne Book博士和研究生Benjamin Black正在進行的研究,是觀察在額外的安全保障下,被動觸覺系統(tǒng)是否在遠程設備操作上和主動觸覺系統(tǒng)有
相同的功效。被動觸覺系統(tǒng)的一個主要局限性在于,設備無法被固定在某個地方。而且與主動觸覺系統(tǒng)相反,被動動力設備必須指引操作者到期望的地點。Book博士和Black正在嘗試開發(fā)先進的被動動力設備控制方案來克服這個困難。
使用圖形系統(tǒng)設計方法
通過圖形系統(tǒng)設計方法,系統(tǒng)設計被分為了幾個步驟。圖形系統(tǒng)設計引入了圖形開發(fā)軟件工具和現(xiàn)成的硬件加快內(nèi)嵌控制設備的設計、塑型和配置進度。研究者采用美國國家儀器公司LabVIEW圖形軟件開發(fā)平臺,來設計和模擬觸覺控制系統(tǒng)和遠程操作通訊。將設計的產(chǎn)品配置到實時PXI控制及數(shù)據(jù)采集系統(tǒng),來對方案進行測試。測試這種方法的優(yōu)勢在于,Book博士和Black可以避免在配置產(chǎn)品的時候花費精力進行低端內(nèi)嵌軟件開發(fā)和個性化硬件設計,而全身心投入到反復試驗和設計當中。

研究者可以迅速地將他們的主從控制器運算法則輸入LabVIEW,然后采用高級程序界面裝載動力設備和傳感器。通過采用實際硬件裝載運算法則,他們能夠用真實的數(shù)據(jù)檢驗理論的正確性。圖1顯示了研究員操作從控制器位置的圖形源碼。另外,軟件工具提供了高級采集界面,比如timed-loop循環(huán)功能。timed-loop循環(huán)是一種LabVIEW程序結構,可采集優(yōu)先權和多線程細節(jié)數(shù)據(jù)。通過這些不同類型的采集方法,工程師和科學家們可以很容易的在他們的軟件上應用多線程功能。這給研究員提供了更多時間來完善設計的產(chǎn)品,而不用花時間在低端代碼開發(fā)上。
硬件設計配置
研究員給PXI模硬件系統(tǒng)配置軟件運算法則。這些系統(tǒng)包括確定性的、實時控制器和可接觸試驗觸覺設備傳感器的合適的I/O模塊。采用LabVIEW實時模塊,研究員可以將他們的運算法則配置到PXI控制器上供無頭headless操作使用。他們采用即插即用運動控制模塊來處理線性從電機,并采用多功能數(shù)據(jù)采集設備來處理定點傳感器。
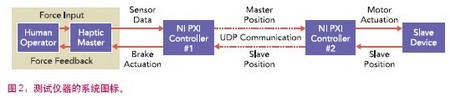
這項研究的測試儀器采用了二自由度(DOF)操縱器作為主設備控制作為從設備的一自由度(DOF)線性電機。主從設備之間沒有物理連接;取而代之的是,PIX實時控制系統(tǒng)與主設備連接,另外一系統(tǒng)與從設備連接,如圖2所示。PIX系統(tǒng)1采用了NI LabVIEW上的確定性應用程序,可在伽馬力傳感器和主操縱器上的光學編碼器上讀出來。研究員采用該數(shù)據(jù)來確定主設備位置,并將位置傳送給PXI系統(tǒng)2。
PXI系統(tǒng)2采用主設備位置作為定點向LabVIEW設計的4KHz PD(比例微分)控制器輸出信號運行線性電機同時在光學編碼器上讀出位置數(shù)據(jù)。從設備受物理結構約束運動受阻。從設備位置通過UDP到PXI系統(tǒng)1被傳回主設備,將數(shù)據(jù)加載到?jīng)Q定觸覺作用力的控制運算法則中,該觸覺作用力應被作用在用戶身上,讓他們感知物理約束力的存在。該作用力是由磁流變制動器所推動的。系統(tǒng)的目的是讓從設備位置追蹤主設備位置。
Book博士和Black現(xiàn)在正在通過使用基于LabVIEW的動力系統(tǒng)進行模擬試驗和深入研究。使用系統(tǒng)識別技術,研究員可以利用在仿真和反饋試驗中采集的實際數(shù)據(jù),建立主設備和從設備之間動力數(shù)字模擬結構。他們采用結果不等式結合LabVIEW仿真模塊,算出了模擬不同控制法則之間反饋的實時公式。這個模擬過程幫助他們在實際應用到觸覺設備生產(chǎn)之前,能更快重復性地驗證法則。
總結
這個研究的故事再次表明了現(xiàn)在的科技優(yōu)勢如何為未來科技鋪路。采用圖像系統(tǒng)設計方法,Book博士和Black利用了內(nèi)嵌開發(fā)民主化的優(yōu)勢,實現(xiàn)了突破性的研究。
