
藍(lán)牙(Bluetooth)協(xié)議標(biāo)準(zhǔn)是由藍(lán)牙特別興趣小組(Bluetooth SIG)發(fā)布的,1999年發(fā)布了Bluetooth 1.0版, 2001年2月發(fā)布了Bluetooth1.1版。目前SIG成員已經(jīng)發(fā)展到3000家左右。藍(lán)牙協(xié)議規(guī)定的無線通信標(biāo)準(zhǔn),基于免申請(qǐng)的2.4GHz的 ISM頻段,采用GFSK跳頻技術(shù)和時(shí)分雙工(TDD)技術(shù),通信距離為10米左右,Blue tooth 1.0版標(biāo)準(zhǔn)規(guī)定的數(shù)據(jù)傳輸速率為 1Mbps。主要適用于各種短距離的無線設(shè)備互連應(yīng)用場合。可以提供點(diǎn)到點(diǎn)或點(diǎn)到多點(diǎn)的無線連接。
1 基于電纜替代的藍(lán)牙協(xié)議簡析
1.1 藍(lán)牙協(xié)議體系
藍(lán)牙協(xié)議規(guī)范所措述的協(xié)議棧模式如圖1所示。

藍(lán)牙體系結(jié)構(gòu)中的協(xié)議可分為四層:
核心協(xié)議:基帶控制協(xié)議(Baseband)、鏈路管理協(xié)議(LMP)、邏輯鏈路控制應(yīng)用協(xié)議(L2CAP)、服務(wù)發(fā)現(xiàn)協(xié)議(SDP);
電纜替代協(xié)議:RFCOMM;
電話傳送控制協(xié)議:TCS二進(jìn)制、AT命令集;
可選協(xié)議:PPP、UDP/TCP/IP、OBEX、WAP、vCard、vCal、IrMC、WAE。
在協(xié)議中,規(guī)定了為基帶控制器、LMP、硬件狀態(tài)及控制寄存器提供命令接口的主機(jī)控制器接口(HCI)。在不同的應(yīng)用模式下,HCI所處的位置不同。它可以位于L2CAP的下面,也可以在L2CAP之上。
1.2 電纜替代協(xié)議應(yīng)用模式
基于ETSI標(biāo)準(zhǔn)的TS07.10信令的RFCOMM協(xié)議,提供了一個(gè)基于L2CAP協(xié)議之上的串口仿真應(yīng)用模式。藍(lán)牙協(xié)議1.0版中, RFCOMM提供的上層服務(wù)模式主要有三種:對(duì)9針RS-232接口仿真模式、空Modem仿真模式和多串口仿真模式。典型的RFCOMM應(yīng)用模式框圖如圖2所示。

1.3 藍(lán)牙嵌入式應(yīng)用模式
僅僅以RFCOMM協(xié)議為基礎(chǔ),作為串口的電纜替代應(yīng)用,無形中限制了藍(lán)牙設(shè)備的應(yīng)用范圍,降低了藍(lán)牙設(shè)備的應(yīng)用價(jià)值。目前計(jì)算機(jī)與外部設(shè)備的接口種類繁多,比較常見的有RS-232、RS-485、Parallel Port、CAN總線、SPI總線、I2C總線等。如果要使藍(lán)牙設(shè)備在各種場合發(fā)揮作用,必須使藍(lán)牙設(shè)備具備適合這些應(yīng)用場合的多種接口功能。使用DSP 數(shù)字信號(hào)處理器作為嵌入式控制器,不僅實(shí)現(xiàn)藍(lán)牙物理設(shè)備的初始化、藍(lán)牙高層協(xié)議,而且利用其接口靈活的特點(diǎn),可以方便地對(duì)藍(lán)牙電纜替代協(xié)議進(jìn)行有效擴(kuò)展。具體應(yīng)用模式如圖3所示。

藍(lán)牙(Bluetooth)協(xié)議標(biāo)準(zhǔn)是由藍(lán)牙特別興趣小組(Bluetooth SIG)發(fā)布的,1999年發(fā)布了Bluetooth 1.0版, 2001年2月發(fā)布了Bluetooth1.1版。目前SIG成員已經(jīng)發(fā)展到3000家左右。藍(lán)牙協(xié)議規(guī)定的無線通信標(biāo)準(zhǔn),基于免申請(qǐng)的2.4GHz的 ISM頻段,采用GFSK跳頻技術(shù)和時(shí)分雙工(TDD)技術(shù),通信距離為10米左右,Blue tooth 1.0版標(biāo)準(zhǔn)規(guī)定的數(shù)據(jù)傳輸速率為 1Mbps。主要適用于各種短距離的無線設(shè)備互連應(yīng)用場合。可以提供點(diǎn)到點(diǎn)或點(diǎn)到多點(diǎn)的無線連接。
1 基于電纜替代的藍(lán)牙協(xié)議簡析
1.1 藍(lán)牙協(xié)議體系
藍(lán)牙協(xié)議規(guī)范所措述的協(xié)議棧模式如圖1所示。
藍(lán)牙體系結(jié)構(gòu)中的協(xié)議可分為四層:
核心協(xié)議:基帶控制協(xié)議(Baseband)、鏈路管理協(xié)議(LMP)、邏輯鏈路控制應(yīng)用協(xié)議(L2CAP)、服務(wù)發(fā)現(xiàn)協(xié)議(SDP);
電纜替代協(xié)議:RFCOMM;
電話傳送控制協(xié)議:TCS二進(jìn)制、AT命令集;
可選協(xié)議:PPP、UDP/TCP/IP、OBEX、WAP、vCard、vCal、IrMC、WAE。
在協(xié)議中,規(guī)定了為基帶控制器、LMP、硬件狀態(tài)及控制寄存器提供命令接口的主機(jī)控制器接口(HCI)。在不同的應(yīng)用模式下,HCI所處的位置不同。它可以位于L2CAP的下面,也可以在L2CAP之上。
1.2 電纜替代協(xié)議應(yīng)用模式
基于ETSI標(biāo)準(zhǔn)的TS07.10信令的RFCOMM協(xié)議,提供了一個(gè)基于L2CAP協(xié)議之上的串口仿真應(yīng)用模式。藍(lán)牙協(xié)議1.0版中, RFCOMM提供的上層服務(wù)模式主要有三種:對(duì)9針RS-232接口仿真模式、空Modem仿真模式和多串口仿真模式。典型的RFCOMM應(yīng)用模式框圖如圖2所示。
1.3 藍(lán)牙嵌入式應(yīng)用模式
僅僅以RFCOMM協(xié)議為基礎(chǔ),作為串口的電纜替代應(yīng)用,無形中限制了藍(lán)牙設(shè)備的應(yīng)用范圍,降低了藍(lán)牙設(shè)備的應(yīng)用價(jià)值。目前計(jì)算機(jī)與外部設(shè)備的接口種類繁多,比較常見的有RS-232、RS-485、Parallel Port、CAN總線、SPI總線、I2C總線等。如果要使藍(lán)牙設(shè)備在各種場合發(fā)揮作用,必須使藍(lán)牙設(shè)備具備適合這些應(yīng)用場合的多種接口功能。使用DSP 數(shù)字信號(hào)處理器作為嵌入式控制器,不僅實(shí)現(xiàn)藍(lán)牙物理設(shè)備的初始化、藍(lán)牙高層協(xié)議,而且利用其接口靈活的特點(diǎn),可以方便地對(duì)藍(lán)牙電纜替代協(xié)議進(jìn)行有效擴(kuò)展。具體應(yīng)用模式如圖3所示。
2 系統(tǒng)硬件結(jié)構(gòu)
本系統(tǒng)的構(gòu)成在硬件上分為兩個(gè)部分,藍(lán)牙基帶和射頻部分采用愛立信(ERICSSON)公司提供的藍(lán)牙模塊ROK101007;嵌入式控制器采用美國TI公司的TMS320VC54X系列的DSP數(shù)字信號(hào)處理器。
2.1 ERICSSON藍(lán)牙模塊
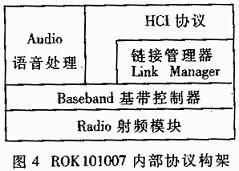
ROK101007 是根據(jù)藍(lán)牙規(guī)范1.0版(Bluetooth 1.0B Version)而設(shè)計(jì)的短距離藍(lán)牙通信模塊,它包括三個(gè)主上部分:基帶控制芯片、Flash存儲(chǔ)器和Radio芯片。它工作在 2.4GHz~2.5GHz的ISM頻段,支持聲音和數(shù)據(jù)的傳輸,其主上功能參數(shù)有:
Bluetooth 1.0B預(yù)認(rèn)證;
2級(jí)RF射頻功率輸出;
提供FCC和ETSI糾錯(cuò)處理;
最大460 KB/s UART數(shù)據(jù)傳輸速率;
提供UART、USB、PCM、I2C等多種HCI接口;
提供內(nèi)部晶振;
內(nèi)部預(yù)制HCI框架;
點(diǎn)到點(diǎn)、點(diǎn)到多點(diǎn)操作;
嵌入式屏蔽保護(hù)。
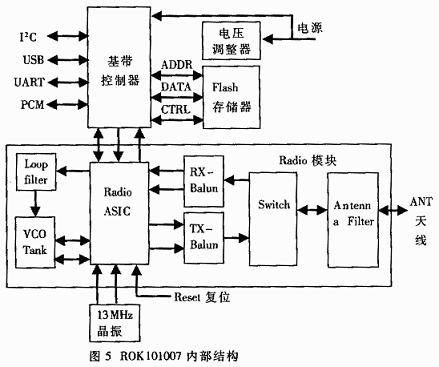
ROK101007特別適合計(jì)算機(jī)及外圍設(shè)備、手持設(shè)備、端口設(shè)備使用。其內(nèi)含的藍(lán)牙協(xié)議構(gòu)架及內(nèi)部系統(tǒng)框圖如圖4、圖5所示。
2.2 DSP處理器
TMS320C54X是16-bit定點(diǎn)DSP,適合無線通信等實(shí)時(shí)嵌入式應(yīng)用的需要。C54x使用了改進(jìn)的哈佛結(jié)構(gòu)。CPU具有專用硬件算術(shù)運(yùn)算邏輯,大量的片內(nèi)存儲(chǔ)器、增強(qiáng)的片內(nèi)外設(shè)以及高度專業(yè)化的指令集,使其具有高度的操作靈活性和運(yùn)行速度。主要特點(diǎn)如下:
運(yùn)算速度快:指令周期為25/20/15/12.5/10ns,運(yùn)算能力為40/50/66/80/100MIPS;
優(yōu)化的CPU結(jié)構(gòu):內(nèi)含1個(gè)40位的算術(shù)運(yùn)算邏輯單元,2個(gè)40位的累加器,2個(gè)40位的加法器,1個(gè)17×17的硬件乘法器和1個(gè)40位的桶形移位器。有4條內(nèi)部總線和2個(gè)地址產(chǎn)生器等。先進(jìn)的CPU優(yōu)化結(jié)構(gòu)可以使DSP高效地實(shí)現(xiàn)無線通信系統(tǒng)中的各種功能。
低功耗方式:54x系列DSP可以在3.3V或2.7V電壓下工作,而有些DSP內(nèi)核采用1.8V電壓工作以減小功耗。
智能外設(shè):除了標(biāo)準(zhǔn)的串行口和分時(shí)復(fù)用(TDM)串口外,54x還提供了多路緩沖串口(McBSP)和外部處理器通信的HPI并行接口。
2.3 系統(tǒng)構(gòu)成
本系統(tǒng)中,采用單5V電源供電,嵌入式系統(tǒng)控制器與藍(lán)牙模塊之間的HCI接口采用UART方式。硬件構(gòu)成框圖如圖6所示。整個(gè)系統(tǒng)分為四個(gè)部分:發(fā)射機(jī)、嵌入式控制器、電源管理、接口邏輯。
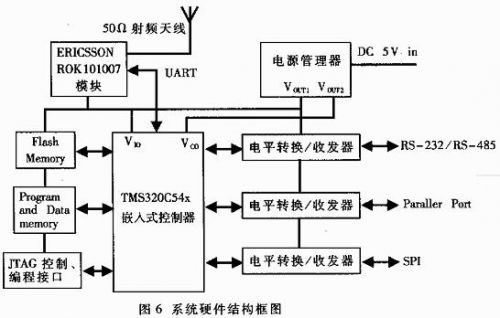
(1)發(fā)射機(jī)由藍(lán)牙模塊ROK101007和阻抗為50Ω的天線構(gòu)成。初始化階段,模塊接收控制器通過UART發(fā)送的HCI命令,實(shí)現(xiàn)藍(lán)牙設(shè)備的復(fù)位、啟動(dòng)、地址查詢、跳頻算法、自動(dòng)尋呼等初始化操作,與附近的藍(lán)牙設(shè)備建立可靠的物理鏈路,并對(duì)物理鏈路進(jìn)行相應(yīng)的加密。在數(shù)據(jù)傳送階段,接收控制器(HCI驅(qū)動(dòng)模塊)送來的HCI數(shù)據(jù)包,經(jīng)過模塊中HCI固件(HCI Firmwire)轉(zhuǎn)化為基帶數(shù)據(jù)包并送給基帶協(xié)議層(Baseband)處理,基帶對(duì)上層送來的數(shù)據(jù)進(jìn)行解碼,將其變?yōu)榭梢园l(fā)送的位數(shù)據(jù)流,按照設(shè)定的跳頻算法,采用高斯頻移鍵控(GFSK)編碼方式通過天線送出去。接收數(shù)據(jù)時(shí),以相反的過程將接收到的數(shù)據(jù)進(jìn)行編碼,組合成HCI數(shù)據(jù)包格式并通過 UART口送給控制器。具體的收發(fā)執(zhí)行過程可以參考ROK101007數(shù)據(jù)及應(yīng)用手冊(cè)以及藍(lán)牙協(xié)議相關(guān)部分。
(2)嵌入式控制器由TI的定點(diǎn)數(shù)字信號(hào)處理器TMS320C54x、Flash Memory、SRAM組成,完成對(duì)藍(lán)牙模塊的初始化、數(shù)據(jù)傳送、協(xié)議實(shí)現(xiàn)等功能。
(3)接口控制邏輯包括應(yīng)用接口和控制接口。控制接口為控制器的HPI接口,主要實(shí)現(xiàn)系統(tǒng)的在線特殊控制和Flash在線編程數(shù)據(jù)傳送口。HPI控制接口通過DSP的HPI主機(jī)接口實(shí)現(xiàn)。應(yīng)用接口包括RS-232/RS-485串行接口邏輯、并行接口邏輯(如IEEE488總線)、SI同步串口邏輯,在不同的嵌入式應(yīng)用中,分別通過不同的接口形式實(shí)現(xiàn)本嵌入式系統(tǒng)與主設(shè)備控制器的接口。應(yīng)用接口通過DSP的片內(nèi)外設(shè)(enhanced peripherals)或者通用I/O端口模擬實(shí)現(xiàn)。
(4)電源管理。系統(tǒng)通過單5V電源供電,可以簡單地從主設(shè)備接口中獲取電源,無須另加電源器件。電源管理模塊采用TI專用電路,提供兩路電壓輸出,+3.3V工作電壓和+1.8V控制器內(nèi)核工作電壓。
3 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)采用TI提供的DSP5000系列專用集成開發(fā)工具CCS1.2開發(fā)。系統(tǒng)軟件構(gòu)成包括應(yīng)用端口通信及協(xié)議模塊、L2CAP協(xié)議模塊、HCI接口驅(qū)動(dòng)模塊、HPI通信模塊和Flash編程模塊。主要任務(wù)可分為:系統(tǒng)初始化、Flash編程、建立物理鏈路、數(shù)據(jù)傳送和接收等。整個(gè)軟件流程如圖7。
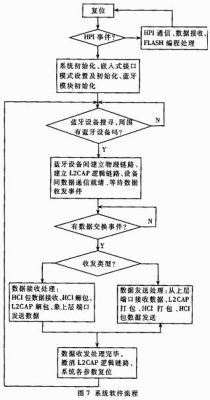
由于藍(lán)牙模塊本身具有線路加密功能,因此在本系統(tǒng)設(shè)計(jì)中沒有考慮軟件加密功能。在實(shí)際的設(shè)計(jì)和應(yīng)用過程中,可以視其實(shí)際應(yīng)用環(huán)境和系統(tǒng)處理速度而添加軟件加密模塊。由于跳頻通信本身具有高抗干擾性的特點(diǎn),本嵌入式藍(lán)牙應(yīng)用系統(tǒng)不僅可以應(yīng)用于各種終端設(shè)備和手持設(shè)備間的中低速無線數(shù)據(jù)交換,而且可廣泛地應(yīng)用于各種工業(yè)設(shè)備、軍事裝備的檢測和控制領(lǐng)域。