
1 引言
隨著電力電子技術(shù)和電力半導(dǎo)體技術(shù)的迅速發(fā)展,中壓大功率傳動(dòng)設(shè)備在石油化工、礦山開采、軋鋼和冶金、運(yùn)輸?shù)阮I(lǐng)域得到了廣泛的應(yīng)用,不僅提高了資源的利用率,同時(shí)還降低了生產(chǎn)的成本,其中變頻器扮演著重要的角色。雖然其電路的拓?fù)浣Y(jié)構(gòu)和控制技術(shù)已經(jīng)比較成熟,但多電平技術(shù)的研究仍備受大家的關(guān)注。多電平技術(shù)避免了器件的直接串聯(lián),具有輸出電壓高,諧波含量低,電壓變化率小,開關(guān)頻率低等優(yōu)點(diǎn)。多電平技術(shù)實(shí)現(xiàn)的關(guān)鍵在于如何實(shí)現(xiàn)大量的SPWM控制信號。本文針對這個(gè)問題進(jìn)行研究和探討,利用DSP和CPLD兩大控制器來實(shí)現(xiàn)多電平SPWM,并最終給出實(shí)測波形圖。
2 總體設(shè)計(jì)方案
2.1單元串聯(lián)多電平變頻器拓?fù)浣Y(jié)構(gòu)介紹
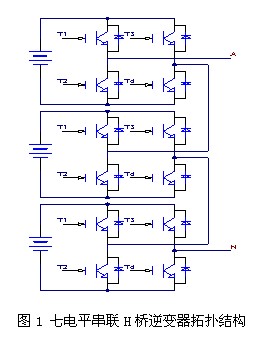
單元串聯(lián)多電平變頻器的拓?fù)浣Y(jié)構(gòu)簡單,易于模塊化,可以根據(jù)系統(tǒng)對輸出電壓、電平數(shù)的要求確定功率單元的級數(shù)。如圖1所示,七電平H橋串聯(lián)逆變器拓?fù)浣Y(jié)構(gòu)圖,其單相電壓是由三個(gè)功率單元組成,每個(gè)功率單元均為H橋逆變電路結(jié)構(gòu),輸出端依次串聯(lián)在一起,并利用SPWM信號控制功率單元中開關(guān)器件的通與斷(即控制功率單元的輸出),最終實(shí)現(xiàn)多電平電壓的疊加輸出。
2.2載波移相控制理論
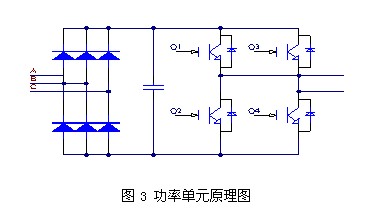
一般來說,N電平的逆變器調(diào)制,需要N-1個(gè)三角載波。移相載波調(diào)制法中,所有三角波均具有相同的頻率和幅值,但是任意兩個(gè)相鄰載波的相位要有一定的相移,其值為
(1) 
調(diào)制信號通常為幅值和頻率都可調(diào)節(jié)的三相正弦信號。通過調(diào)制波和載波的比較,可以產(chǎn)生所需要的開關(guān)器件的驅(qū)動(dòng)信號[1]。
但在數(shù)字化實(shí)現(xiàn)中,載波移相法一般不是由一個(gè)調(diào)制波和一組經(jīng)過相移的載波比較生成,而是由調(diào)制波和一個(gè)載波進(jìn)行比較之后,再進(jìn)行一定的延時(shí)得到各個(gè)功率單元的SPWM控制信號。在本系統(tǒng)中采用此種方法來實(shí)現(xiàn)多路SPWM的控制信號。
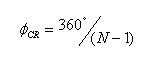
根據(jù)對以上概念的理解和分析,在本系統(tǒng)中,采用DSP+CPLD來完成多路SPWM控制信號的實(shí)現(xiàn)。其中由DSP控制器實(shí)現(xiàn)單相電壓中的第一級功率單元兩橋臂控制信號,并由CPLD來實(shí)現(xiàn)對這兩路控制信號的移相延時(shí),進(jìn)而實(shí)現(xiàn)單相電壓中各個(gè)功率單元的SPWM控制信號(即移相后信號)。系統(tǒng)原理框圖如下圖2所示:
1 引言
隨著電力電子技術(shù)和電力半導(dǎo)體技術(shù)的迅速發(fā)展,中壓大功率傳動(dòng)設(shè)備在石油化工、礦山開采、軋鋼和冶金、運(yùn)輸?shù)阮I(lǐng)域得到了廣泛的應(yīng)用,不僅提高了資源的利用率,同時(shí)還降低了生產(chǎn)的成本,其中變頻器扮演著重要的角色。雖然其電路的拓?fù)浣Y(jié)構(gòu)和控制技術(shù)已經(jīng)比較成熟,但多電平技術(shù)的研究仍備受大家的關(guān)注。多電平技術(shù)避免了器件的直接串聯(lián),具有輸出電壓高,諧波含量低,電壓變化率小,開關(guān)頻率低等優(yōu)點(diǎn)。多電平技術(shù)實(shí)現(xiàn)的關(guān)鍵在于如何實(shí)現(xiàn)大量的SPWM控制信號。本文針對這個(gè)問題進(jìn)行研究和探討,利用DSP和CPLD兩大控制器來實(shí)現(xiàn)多電平SPWM,并最終給出實(shí)測波形圖。
2 總體設(shè)計(jì)方案
2.1單元串聯(lián)多電平變頻器拓?fù)浣Y(jié)構(gòu)介紹
單元串聯(lián)多電平變頻器的拓?fù)浣Y(jié)構(gòu)簡單,易于模塊化,可以根據(jù)系統(tǒng)對輸出電壓、電平數(shù)的要求確定功率單元的級數(shù)。如圖1所示,七電平H橋串聯(lián)逆變器拓?fù)浣Y(jié)構(gòu)圖,其單相電壓是由三個(gè)功率單元組成,每個(gè)功率單元均為H橋逆變電路結(jié)構(gòu),輸出端依次串聯(lián)在一起,并利用SPWM信號控制功率單元中開關(guān)器件的通與斷(即控制功率單元的輸出),最終實(shí)現(xiàn)多電平電壓的疊加輸出。
2.2載波移相控制理論
一般來說,N電平的逆變器調(diào)制,需要N-1個(gè)三角載波。移相載波調(diào)制法中,所有三角波均具有相同的頻率和幅值,但是任意兩個(gè)相鄰載波的相位要有一定的相移,其值為
(1)
調(diào)制信號通常為幅值和頻率都可調(diào)節(jié)的三相正弦信號。通過調(diào)制波和載波的比較,可以產(chǎn)生所需要的開關(guān)器件的驅(qū)動(dòng)信號[1]。
但在數(shù)字化實(shí)現(xiàn)中,載波移相法一般不是由一個(gè)調(diào)制波和一組經(jīng)過相移的載波比較生成,而是由調(diào)制波和一個(gè)載波進(jìn)行比較之后,再進(jìn)行一定的延時(shí)得到各個(gè)功率單元的SPWM控制信號。在本系統(tǒng)中采用此種方法來實(shí)現(xiàn)多路SPWM的控制信號。
根據(jù)對以上概念的理解和分析,在本系統(tǒng)中,采用DSP+CPLD來完成多路SPWM控制信號的實(shí)現(xiàn)。其中由DSP控制器實(shí)現(xiàn)單相電壓中的第一級功率單元兩橋臂控制信號,并由CPLD來實(shí)現(xiàn)對這兩路控制信號的移相延時(shí),進(jìn)而實(shí)現(xiàn)單相電壓中各個(gè)功率單元的SPWM控制信號(即移相后信號)。系統(tǒng)原理框圖如下圖2所示:
3 DSP控制部分
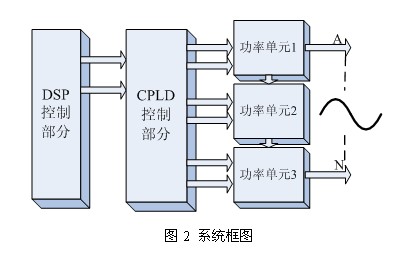
DSP控制部分主要任務(wù)是實(shí)現(xiàn)單相電壓中第一級功率單元的兩路控制信號。如圖3所示,這兩路控制信號分別控制左橋臂Q1和右橋臂Q3兩開關(guān)器件的通與斷,為避免同一橋臂上的兩個(gè)開關(guān)器件同時(shí)導(dǎo)通,使Q2和Q4控制信號分別為Q1和Q3信號的互補(bǔ)信號,由于器件的動(dòng)作需要一定時(shí)間,因此Q1和Q2、Q3和Q4信號間需要增加一定的死區(qū)延時(shí)時(shí)間,在本系統(tǒng)中,死區(qū)延時(shí)的時(shí)間由硬件完成。
功率單元左橋臂Q1的控制信號由三角載波與參考波(正弦波)比較得到,當(dāng)參考波大于載波時(shí),輸出高電平,Q1導(dǎo)通,Q2截止;反之,輸出低電平,Q1截止,Q2導(dǎo)通。Q1信號取反后得到Q2信號。左橋臂Q3的控制信號由互差180。的三角載波與參考波(正弦波)比較得到,當(dāng)參考波大于載波時(shí),輸出高電平,Q3導(dǎo)通,Q4截止;反之,輸出低電平,Q3截止,Q4導(dǎo)通。Q3信號取反后得到Q4信號。載波與參考波的比較過程參考圖4,兩橋臂控制信號的實(shí)測波形如圖5。將參考波分別向左移或向右移動(dòng)120。并與三角載波相比較便可得到其它兩相電壓的第一級功率單元的控制信號。

根據(jù)對以上內(nèi)容的分析,在本系統(tǒng)中采用了TI公司的DSP TMS320F2812作為該部分的控制核心。其內(nèi)核為32位,運(yùn)行速度可以達(dá)到150MIPS,足夠完成一些較復(fù)雜的控制算法。同時(shí)其有6路獨(dú)立的PWM輸出、2個(gè)異步串行通訊口、16通道12位AD輸入,內(nèi)置了36K的RAM和256K的Flash存儲器,可以存放較大規(guī)模的程序。在主控制電路中,只需要在該DSP的基礎(chǔ)上配合一些簡單的外圍電路即可實(shí)現(xiàn)所需的6路SPWM控制信號。
4 CPLD控制部分
CPLD控制部分主要任務(wù)是對第一級功率單元H橋左、右橋臂控制信號進(jìn)行移相(即上文所提到的延時(shí)),進(jìn)而得到以后各級功率單元的左、右橋臂的控制信號。該部分設(shè)計(jì)的關(guān)鍵是信號的邊沿檢測和移相延時(shí)兩部分。如下圖6所示,首先,CPLD對SPWM進(jìn)行邊沿信號檢測,當(dāng)檢測到上升沿(或下降沿)到來后,再進(jìn)行Td時(shí)間的延時(shí),最后輸出置1(或0),以達(dá)到移相的目的。
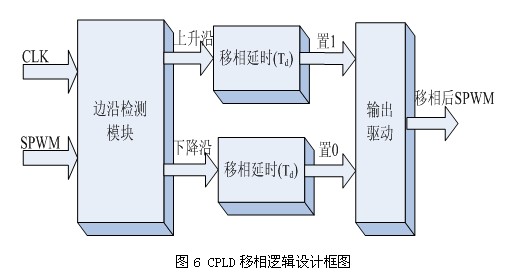
邊沿信號檢測可以利用邊沿觸發(fā)的觸發(fā)器去檢測上升沿或下降沿,但是這種方式對于邊沿的檢測過于敏感,系統(tǒng)中的一個(gè)尖峰干擾將會(huì)導(dǎo)致邊沿檢測的誤判,為解決這個(gè)問題,我們進(jìn)行多次采樣,比較前后幾次采樣的結(jié)果,再來判別邊沿是否到來。這種方法對抗干擾起到了一定的作用,增強(qiáng)了系統(tǒng)的健壯性、穩(wěn)定性。
移相延時(shí)部分最重要的是對延時(shí)時(shí)間的選擇,延時(shí)時(shí)間長或短都會(huì)影響到系統(tǒng)的性能,本設(shè)計(jì)中,第二級功率單元的延時(shí)時(shí)間根據(jù)公式(2)(公式內(nèi)容僅供參考)計(jì)算得到(以后各級功率單元的延時(shí)時(shí)間相應(yīng)的增加Td即可):
(2) 
其中, 為三角載波頻率,N為逆變器輸出電平數(shù)。
經(jīng)過CPLD移相后,A相三個(gè)功率單元的左橋臂控制信號如下圖7所示,第一級功率單元的輸出如圖8,圖9是A相三個(gè)功率單元輸出疊加后的波形。

利用DSP和CPLD相結(jié)合的方法實(shí)現(xiàn)載波移相多電平PWM,使單元級聯(lián)型多電平技術(shù)變得更加模塊化,同時(shí)使產(chǎn)品的升級變得更簡單化。例如,產(chǎn)品由七電平設(shè)計(jì)改為九電平設(shè)計(jì)(或十一電平、十三電平等),不需要改變DSP中的程序,也不需要改變DSP部分的硬件電路設(shè)計(jì),只需要改變CPLD中Td的時(shí)間,并相應(yīng)的增加兩路輸出即可。
5 總結(jié)
多電平技術(shù)的發(fā)展,需要能夠產(chǎn)生大量的PWM信號的控制器,但傳統(tǒng)的控制器只能提供6路PWM信號,遠(yuǎn)不能滿足要求,即使控制器可以輸出多路控制信號,在產(chǎn)品升級換代的時(shí)候,仍需要更改大量的代碼,進(jìn)行長期的調(diào)試等等,延長了產(chǎn)品上市的時(shí)間。為此本文設(shè)計(jì)了基于DSP+CPLD的載波移相多電平PWM實(shí)現(xiàn)的方案,該方案不僅可以輸出18路PWM信號,而且稍加修改便可以輸出24路、36路等更多路PWM信號,同時(shí),其模塊化的設(shè)計(jì)思想使產(chǎn)品的升級換代變得更加容易,縮短了產(chǎn)品的上市時(shí)間。
參考文獻(xiàn)
[1] Bin Wu著(加拿大),衛(wèi)三民,蘇位峰,宇文博 譯。大功率變頻器及交流傳動(dòng)。機(jī)械工業(yè)出版社.2008.
[2] 朱凌,劉濤,魯志平,王毅。基于DSP的載波移相多電平PWM實(shí)現(xiàn)方法。華北電力工程學(xué)報(bào).2004, 31(5):21-25.
[3] 李永東。交流電機(jī)數(shù)字控制系統(tǒng)。北京:機(jī)械工業(yè)出版社,2002.
[4] 何湘寧,陳柯蓮 編著。多電平變換器的理論和應(yīng)用技術(shù)。機(jī)械工業(yè)出版社, 2006.