
摘 要: 經(jīng)典的碼盤數(shù)字測速方法有M 法、T 法、M/ T 法,但都有一定的不足。為了克服原有方法的不足,設計并實現(xiàn)了一種在較大速度范圍都有良好精度和良好快速性的測速方法。電路采用FPGA 實現(xiàn),測速得到的數(shù)據(jù)通過PCI 總線從設備控制器實現(xiàn)與控制計算機通信。從而根據(jù)實際傳輸?shù)男枰喕薖CI 從設備控制器,實現(xiàn)了PCI 總線I/ O 普通讀與猝發(fā)讀數(shù)據(jù)的功能。
0 引 言
增量式碼盤是一種原理簡單,抗干擾能力強,可靠性高,適合于長距離傳輸?shù)奈恢门c速度測量裝置,已成功應用于大量的控制系統(tǒng)中,極大地提高了其位置控制精度。理論上,只要測得碼盤輸出信號的頻率,即可得到被測軸的轉(zhuǎn)速,并且可以得到比模擬方法更高的測量精度。本文以增量式碼盤為基礎,設計實現(xiàn)一種在較寬速度范圍都有較高精度并且有良好反應速度的速度、位置測量裝置。
利用增量式碼盤的反饋脈沖信號測量速度的典型方法有3 種: M 法、T 法和M/ T 法。其中,M 法是直接計取給定采樣周期內(nèi)的反饋脈沖數(shù)來測量速度的,低速時會因為脈沖數(shù)少而影響測速精度; T 法是通過測量兩個相鄰反饋脈沖的間隔時間來測量速度的,高速時則因為脈沖間隔短而導致精度不高; M/ T 法結(jié)合了前兩種方法的優(yōu)點,在大致相等的采樣間隔內(nèi),計取Cm 個反饋脈沖,并同時計取這Cm 個反饋脈沖間隔內(nèi)插入的高頻時標信號數(shù)Cf ,經(jīng)計算得到速度測量值。M/ T 法雖然克服了前兩種方法的缺點,但仍存在低速時采樣時機不確定,精度不高等問題,這給定周期采樣的數(shù)字伺服控制系統(tǒng)帶來很大的不便,所以又出現(xiàn)了變M/ T 法等方法,以進一步改善M/ T 法的性能和實用性[ 12] 。
本文利用FPGA 實現(xiàn)了一種改進的M/ T 法,克服經(jīng)典M/ T 法的不足,其測速電路與控制器間的數(shù)據(jù)接口形式有PCI 總線和雙端口RAM,便于在高性能控制系統(tǒng)中使用。
1 總體方案
根據(jù)控制系統(tǒng)的實際情況,所設計的測速板具有位置測量和速度測量功能,如圖1 所示,由倍頻辨向模塊、改進M/ T 法測速模塊、PCI 從設備控制器三個部分組成。

圖1 總體設計方案。
1. 1 倍頻辨向
增量式碼盤的典型輸出是兩個相位差為90°的方波信號A,B 以及零位脈沖信號Z( 見圖2) 。
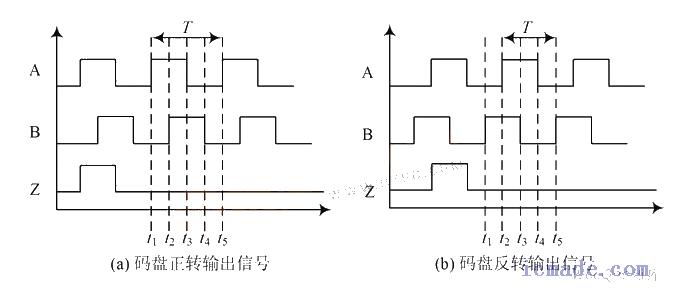
圖2 增量式碼盤輸出。
A,B 之間的相位關系標志被測軸的轉(zhuǎn)向,即當正轉(zhuǎn)時A 相超前B 相90°,反轉(zhuǎn)時B 相超前A 相90°。對于每個確定的碼盤,其脈沖周期T 對應的碼盤角位移固定為,故其量化誤差為/ 2 。如果能將A,B 信號四倍頻,則計數(shù)脈沖的周期將減小到T / 4,量化誤差下降為θ/ 8,從而使增量式碼盤的角位移測量精度提高4 倍。從圖2 可知,根據(jù)A,B 兩方波信號之間相位關系的4 次變化,即可產(chǎn)生四倍頻信號和辨向信號,這樣就可以實現(xiàn)增量式碼盤測量精度的提高 。
1. 2 改進的M/ T 測速算法
圖3 展示了改進M/ T 法的電路原理,這是實現(xiàn)高精度的硬件基礎。圖4 為改進M/ T 法的時序圖。
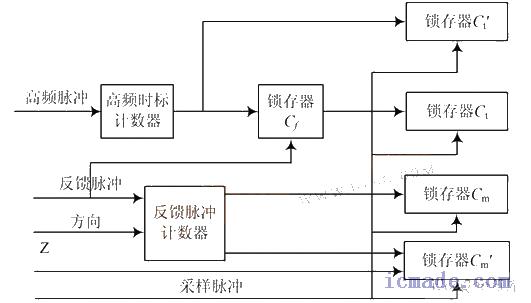
圖3 改進M/ T 法電路原理圖。

圖4 改進M/ T 法時序圖。
對圖3 及其時序圖4 的分析可以看出: 本測速電路在每個反饋脈沖時鎖存高頻時鐘的計數(shù)值,兩個采樣周期間的高頻時標增量值Ct 實際表示為T 2 前一個反饋脈沖上升沿到T4 前一個反饋脈沖上升沿的高頻時標增量,而在采樣周期內(nèi)每個反饋脈沖到來都對反饋脈沖計數(shù)器計數(shù),兩個采樣脈沖采得反饋脈沖增量值Cm 實際表示為T 1 ~ T 3 之間的反饋脈沖增量值,位置的反饋脈沖增量值Cm‘ 則是在C m 的基礎上考慮方向得到的,那么結(jié)合32 位浮點運算,這種測速方法就解決了采樣時機不確定的缺點。
根據(jù)上述分析,通過差分處理就可得到當前實際采樣間隔內(nèi)的反饋脈沖增量值Cm 和高頻時標增量值Ct :
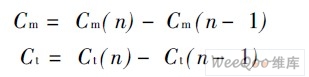
這樣得到的速度是當前實際采樣間隔內(nèi)的平均速度:

式中: K R 為反饋信號脈沖當量; f 0 為高頻時標頻率。
在實際采樣點T 2 處,高頻時標信號f 0 的邊沿不能總與反饋脈沖信號plus 的邊沿保持一致,因而會產(chǎn)生? 1 個高頻時標當量的計數(shù)誤差,從而影響這種測速算法的測速精度。因此高精度數(shù)字測速算法的測速相對誤差為:

動態(tài)位置算法不僅關注已經(jīng)發(fā)生的反饋脈沖數(shù)量,也關注反饋脈沖的發(fā)生時刻,其硬件基礎是依據(jù)圖3 所示邏輯電路的。根據(jù)當前有效采樣周期的定周期采樣點和實際采樣點之間的時間差:
并根據(jù)改進的M/ T 法得到被測對象的平均速度v n ,由vn 和 T n 相乘就可以計算出時間差 T ( n) 中所包含的動態(tài)位置信息,因此由當前有效采樣周期內(nèi)的增量式高精度動態(tài)位置信息可以得出位置量:

可根據(jù)這種方法完成測位置的功能。
2 各個模塊VHDL 實現(xiàn)
根據(jù)圖1 的總體設計方案,使用VHDL 語言設計實現(xiàn)如下幾個模塊。
2. 1 倍頻辨向模塊
為便于使用VHDL 語言描述,對圖2 的碼盤信號作如下分析:
( 1) 當碼盤正轉(zhuǎn)時,在一個周期T 內(nèi),A,B 兩相信號共有4 次相對變化: 00 → 10 → 11 → 01。這樣,根據(jù)前一次和當前的信號,就可以判斷方向,并產(chǎn)生四倍頻脈沖。
( 2) 同理當碼盤反轉(zhuǎn)時,也根據(jù)A,B 兩相信號的4 次相對變化: 00 →01 →11 →10,可以判斷方向,并產(chǎn)生四倍頻脈沖信號。
( 3) 當線路受到干擾或出現(xiàn)故障時,則可能出現(xiàn)其他狀態(tài)轉(zhuǎn)換過程,此時不產(chǎn)生脈沖。
根據(jù)上述分析就可以設計出測速辨向模塊,當判斷正轉(zhuǎn)時,把方向輸出置“1” ,反向時置“0”。
2. 2 改進M/ T 法測速模塊
如圖3 所示可以看出,本部分的VHDL 設計分成兩個模塊: 計數(shù)器模塊與鎖存器模塊。
其中,計數(shù)器模塊分為兩種: 高頻時標計數(shù)器和反饋脈沖計數(shù)器。高頻時標計數(shù)器在每個高頻時標的上升沿都做+ 1 計數(shù),在每個反饋脈沖的上升沿對計數(shù)值鎖存。反饋脈沖計數(shù)器,需要兩個輸出: 反饋脈沖計數(shù)值Cm 、位置反饋脈沖計數(shù)值Cm’。其中,Cm 的增量值用于速度的計算,所以在每一個反饋脈沖到來時,計數(shù)器都+ 1; Cm‘的計數(shù)值用于位置的計算,所以它是在Cm的基礎上考慮了碼盤方向得到的計數(shù)值,在正轉(zhuǎn)時反饋脈沖計數(shù)器+ 1,反轉(zhuǎn)時- 1,當零位脈沖Z有效時,對其置0。然后分別輸出Cm ,Cm’,由此就可以得到反饋脈沖計數(shù)器模塊。
在每個采樣周期的上升沿還要鎖存Cm,Ct 的增量值和Ct‘ 與Ct 的差值,由于都做了差分處理,所以這三個鎖存器使用雙字就能滿足設計要求,而Cm’鎖存器在零位信號Z 后不進行差分處理,若采用36 000 刻增量式碼盤,并進行10 000 倍頻,位置范圍為±720°,那么需要的最大計數(shù)值為:

可見,雙字鎖存器也能滿足設計要求。
綜上所述,本設計設置了4 個雙字信號鎖存器Cm ,Cm’,Ct ,Ct‘,同時還需要對其控制輸出,所以在PCI 從設備控制器中為I/ O 分配4 個雙字的地址空間。然后根據(jù)PCI 總線給出的地址信號PCI_AD[ 3: 2] 和數(shù)據(jù)輸出使能信號DATA _ EN 對這4 個雙字寄存器尋址輸出。
2. 3 PCI 接口控制器
PCI 的時序規(guī)則和PCI 的總線協(xié)議由PCI 接口控制器實現(xiàn),同時它還負責傳遞地址和數(shù)據(jù)輸出使能信號給測速模塊,實現(xiàn)I/ O 口的基本讀與猝發(fā)讀數(shù)據(jù)功能。
從設備控制器包括2 個部分: 奇偶校驗模塊和PCI從設備狀態(tài)機。
2. 3. 1 奇偶校驗模塊
PCI 的奇偶校驗提供了一種機制來決定一件作業(yè)。
該作業(yè)判斷主設備是否成功地尋址相應的從設備,且數(shù)據(jù)是否正確地在它們之間傳輸。通過該模塊完成數(shù)據(jù)傳輸過程中PCI _AD 和PCI _CBE 的偶校驗。偶校驗的輸出信號在地址和數(shù)據(jù)周期有效,其產(chǎn)生的規(guī)則是使偶校驗輸出、PCI_CBE、PCI_AD 各位的“1”的個數(shù)為偶數(shù)。那么采用把PCI_AD 與PCI_CBE 各位異或的方法,就可以實現(xiàn)偶校驗的功能。
2. 3. 2 PCI 從設備狀態(tài)機
PCI 從設備控制器是PCI 接口設計的核心模塊,按功能來說,它要產(chǎn)生奇偶校驗和數(shù)據(jù)的使能信號,并根據(jù)PCI_AD 和PCI_CBE 產(chǎn)生讀地址,完成主從設備的握手信號,并且實現(xiàn)從設備狀態(tài)機在各個狀態(tài)之間的轉(zhuǎn)換。
由于本設計只需要完成I/ O 讀操作,本狀態(tài)機設計配置空間的功能放在了從設備控制器來完成,同時刪去了PCI 操作中對存儲器空間、配置空間的操作,結(jié)合PCI 總線的傳輸時序,如圖5 給出了其基本結(jié)構(gòu)。
( 1) 空閑狀態(tài)為PCI 從設備的初始狀態(tài),在沒有任何操作的時候,PCI 從設備將始終保持這個狀態(tài);( 2) 每次數(shù)據(jù)傳輸時首先傳出地址和命令字,根據(jù)地址和命令字確定是不是對本設備的訪問,并確定訪問的首地址; 從設備則從命令字中識別該訪問是讀操作還是寫操作;( 3) 讀訪問只有在信號IRDY,TRDY,DEVSEL都為低狀態(tài)時才能進行;( 4) 猝發(fā)傳輸需要通過地址遞增邏輯來實現(xiàn)地址的自動遞加,其地址遞增的周期為數(shù)據(jù)周期和最后傳輸周期總和,在等待周期暫停遞增;( 5) 主從設備中任一方?jīng)]有準備好,操作中都需要能夠引起等待狀態(tài)插入的活動;( 6) 讀操作還有一個中間準備過程。

圖5 讀狀態(tài)機結(jié)構(gòu)。
那么完成本狀態(tài)機需要6 個狀態(tài): idle 表示空閑狀態(tài); addr 表示地址周期; tur nad 表示讀轉(zhuǎn)換周期; data表示數(shù)據(jù)傳輸周期; laST t ra 表示最后傳輸周期; wait 表示等待周期; 在各個狀態(tài)到來時還要對中間信號、輸出信號和本地信號執(zhí)行相應的操作:
( 1) idle,addr,turnad 周期對PCI_TRDYn 和PCI_DEVSELn 置高電平; addr 周期依據(jù)地址信號確定是否選中本機,識別是否為讀操作; addr 周期輸出PCI _AD[ 3: 2] 對寄存器進行尋址,實現(xiàn)讀操作。
( 2) data,lastt ra 周期對PCI _ T RDYn 和PCI _DEVSELn 置低電平; data,last t ra 周期置DAT A _EN有效并輸出。
( 3) addr ,data,last t ra 周期置奇偶校驗有效。
( 4) 等待周期置PCI _TRDYn 和PCI_ DEVSELn低電平。
根據(jù)對PCI 總線傳輸時序的分析,影響各個狀態(tài)相互轉(zhuǎn)化的因素是: 幀同步信號PCI _FRAMEn、主設備準備好信號PCI _IRDYn、讀識別信號READn。其中,READn 用來標識狀態(tài)addr 產(chǎn)生的中間識別信號。
3 測試平臺與仿真測試
這種改進M/ T 數(shù)字測速及位置檢測算法的硬件采用Xilinx 公司的FPGA XC3S400。使用36 000 刻的增量式碼盤,速度環(huán)采樣周期T 設定為1 ms,高頻時標信號的頻率為40 MHz,結(jié)合PC 運算的數(shù)字測速算法可以在速度0. 001~ 150(?) / s 的范圍內(nèi)獲得? 2. 5 (10- 5 s 的測速精度。與此同時,高精度動態(tài)位置檢測算法可以使位置反饋的動態(tài)測量分辨率提高到10- 2 ~10- 5個脈沖當量。
對編寫好的VHDL 程序采用ISE 進行綜合,并編寫測試平臺,用ModelSim 對其進行仿真測試。圖6 為PCI 控制器的仿真圖,圖中state 表示狀態(tài)機在內(nèi)部轉(zhuǎn)換的過程,狀態(tài)1 表示空閑狀態(tài),狀態(tài)2 表示地址周期,狀態(tài)4 表示讀轉(zhuǎn)換周期,狀態(tài)8 表示最后傳輸周期,狀態(tài)9 表示猝發(fā)讀寫周期。

圖6 I/ O 讀操作。
該I/ O 讀操作,將地址為1 的寄存器讀出。這里設定I/ O 地址為0X200~ 0X20F 這4 個雙字空間,那么在地址周期中地址0X204 的2~ 3 位尋址于寄存器的第一個雙字,其后緊跟的是讀的轉(zhuǎn)換周期,猝發(fā)讀寫周期和最后一位讀寫周期。可以看出,這兩個周期都對這個寄存器進行了讀操作。
4 結(jié) 語
本文介紹了使用FPGA 設計和實現(xiàn)基于PCI 總線傳輸?shù)母倪M型M/ T 法測速電路,它克服了經(jīng)典測速方法的幾個缺點,在較大速度范圍內(nèi)都具有良好的精度。
同時使用FPGA 設計和實現(xiàn)了PCI 從設備控制器,使得測速電路的設計與PCI 總線的設計成為一個整體,節(jié)省了板上器件,也使得整個設計信號在FPGA 內(nèi)部流動,具有更加良好的抗干擾能力和穩(wěn)定性。