
近年來,電機(jī)的空間矢量理論被引入到逆變器及其控制中,形成和發(fā)展了空間矢量PWM(SVPWM)控制思想。其原理就是利用逆變器各橋臂開關(guān)控制信號的不同組合,使逆變器輸出電壓空間矢量的運(yùn)行軌跡盡可能接近圓形。空間矢量脈寬調(diào)制技術(shù),不僅使電機(jī)脈動降低,電流波形畸變減小,且與常規(guī)正弦脈寬調(diào)制 (SP-WM)技術(shù)相比,直流電壓利用率有很大提高,并更易于數(shù)字化實(shí)現(xiàn)。

1 電壓空間矢量調(diào)制(SVPWM)算法
SVPWM是以磁鏈跟蹤控制為目標(biāo),使逆變器瞬時輸出三相脈沖電壓合成的空間電壓矢量與期望輸出三相正弦波電壓合成的空間電壓矢量相等。對于三相電壓型逆變器而言,它有8種工作狀態(tài),用矢量表示這8種空間狀態(tài),如圖1所示。
介紹SVPWM工作原理的相關(guān)文獻(xiàn)很多,這里不再細(xì)述,以下給出算法步驟:
(1)判斷參考電壓矢量Vref所在扇區(qū)
引入三個中間變量A,B,C:


則扇區(qū)號:S=A+2B+4C。
(2)計(jì)算扇區(qū)的有效電壓空間矢量和零矢量的作用時間Tx,Ty和T0
引入三個中間變量X,Y和Z:

對于不同的扇區(qū),Tx,Ty按表1取值。
飽和判斷:Tyout。
 計(jì)算零電壓矢量作用時間:T0=TPWM-Tx-Ty。
計(jì)算零電壓矢量作用時間:T0=TPWM-Tx-Ty。

(3)開關(guān)切換時間分配
先定義空間矢量切換點(diǎn)分別為:
則根據(jù)空間矢量所處的扇區(qū)不同,晶體管的切換時間Tcm1,Tcm2,Tcm3分別如表2所示。

Simulink仿真環(huán)境下可以方便地利用模塊和軟件編程擴(kuò)展進(jìn)行仿真。根據(jù)上述實(shí)現(xiàn)方法,構(gòu)造了如圖2所示的Simulink仿真模型。
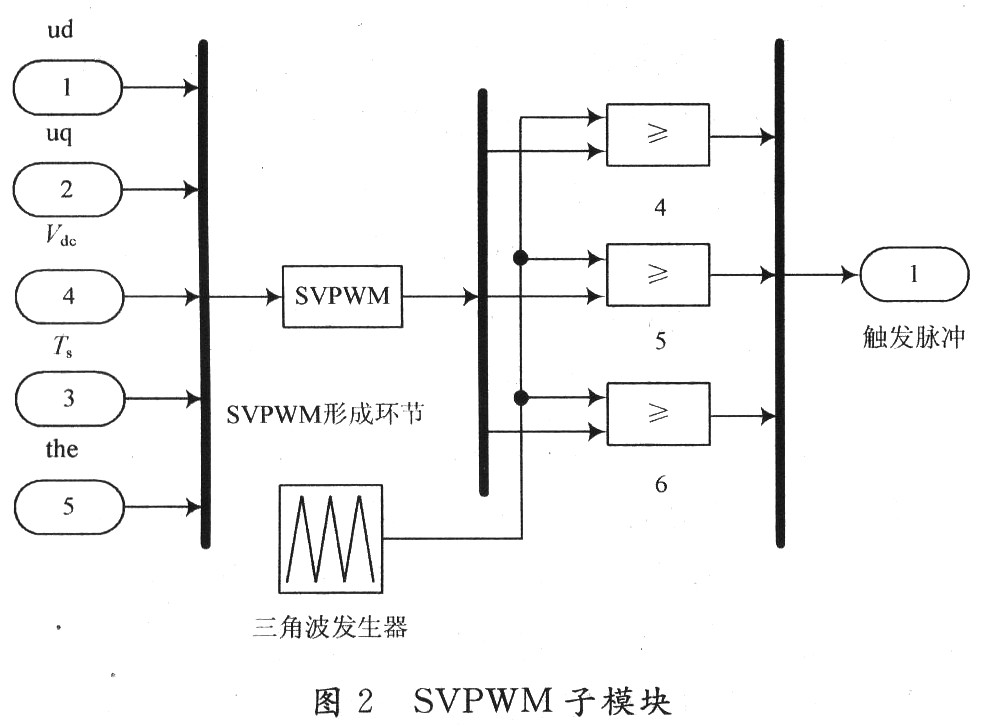
在模型中使用Repeating Sequence模塊作為雙向定時計(jì)數(shù)器,與SVPWM調(diào)制波進(jìn)行比較,其輸出作為滯環(huán)比較器的輸入。Matlab語言編寫的S函數(shù)則作為比較值的計(jì)算與分配單元。
2 仿真與分析
仿真對象:SVPWM與永磁同步電機(jī)。通過Matlab仿真得到的波形如圖3所示。

3 結(jié) 語
通過仿真研究,SVPWM矢量控制變頻調(diào)速系統(tǒng)的結(jié)構(gòu)簡單,容易實(shí)現(xiàn)數(shù)字化。扇區(qū)判斷正確,占空比對應(yīng)的時間準(zhǔn)確,轉(zhuǎn)矩輸出波形較平穩(wěn)。其逆變器直流電壓利用率比用SPWM高,諧波成分小,采用矢量控制技術(shù)的電機(jī)調(diào)速系統(tǒng)動靜態(tài)性能非常優(yōu)良。