
在過(guò)去的數(shù)十年中,從汽車(chē)工業(yè)的發(fā)展趨勢(shì)看,汽車(chē)制造對(duì)于舒適度、效率、環(huán)境友好性的要求不斷提升,對(duì)于性能和汽車(chē)安全性的期望值也不斷提高。在這一趨勢(shì)的帶動(dòng)下,汽車(chē)中的電子子系統(tǒng)以及連接這些子系統(tǒng)的配線(xiàn)的數(shù)量大幅增加。線(xiàn)纜的增多導(dǎo)致汽車(chē)重量增加,當(dāng)然也增加了成本。不過(guò),在八十年代初期,Bosch公司推出了CAN總線(xiàn)網(wǎng)絡(luò),這種總線(xiàn)網(wǎng)絡(luò)有效降低了線(xiàn)路連接的復(fù)雜度,減輕了線(xiàn)纜重量并節(jié)省了成本,因而被廣泛用于汽車(chē)工業(yè)。
汽車(chē)制造從集中控制系統(tǒng)到分布式控制系統(tǒng)的轉(zhuǎn)變有助于汽車(chē)廠商達(dá)到降低汽車(chē)重量和成本的目標(biāo)。集中控制系統(tǒng)通過(guò)大量線(xiàn)纜將所有執(zhí)行裝置、傳感器以及開(kāi)關(guān)連接到控制系統(tǒng),而分布式管理系統(tǒng)將電子控制單元(ECU)放置在需要控制的位置,通過(guò)總線(xiàn)系統(tǒng)進(jìn)行相互通信(例如:兩線(xiàn)制CAN總線(xiàn)網(wǎng)絡(luò))(圖1)。
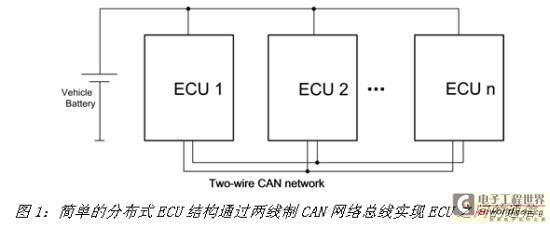
CAN網(wǎng)絡(luò)由多個(gè)收發(fā)器模塊組成,這些收發(fā)器通過(guò)一對(duì)總線(xiàn)鏈接。每個(gè)模塊為一個(gè)CAN收發(fā)器,用于支持協(xié)議控制器(微控制器、狀態(tài)機(jī)或模塊內(nèi)的其它處理引擎)和物理介質(zhì)(線(xiàn)纜)之間的物理層互聯(lián)。這種新型CAN總線(xiàn)設(shè)計(jì)需要快速標(biāo)準(zhǔn)化,以確保來(lái)自不同廠商的ECU之間正確通信。ISO(國(guó)際標(biāo)準(zhǔn)化組織)在1993年首先對(duì)其實(shí)行了標(biāo)準(zhǔn)化定義,并在2003年和2007做出了進(jìn)一步修正。目前的ISO 11898標(biāo)準(zhǔn)已經(jīng)被原始設(shè)備制造商(OEM)作為現(xiàn)行標(biāo)準(zhǔn)采用,用于所有汽車(chē)內(nèi)部的CAN通信。
為滿(mǎn)足ISO標(biāo)準(zhǔn)并提供正確的總線(xiàn)電平,大部分CAN收發(fā)器總線(xiàn)驅(qū)動(dòng)器需要5V電源供電。但電子系統(tǒng)的主電源通常不能滿(mǎn)足子系統(tǒng)的電源要求。這種情況下,提供的系統(tǒng)電源通常不能直接為CAN收發(fā)器供電,例如,系統(tǒng)可能只提供一個(gè)3.3V電源。有時(shí)由于空間限制無(wú)法容納最合適的電源數(shù)量;有時(shí)則由于發(fā)熱問(wèn)題而無(wú)法直接從電池產(chǎn)生5V電壓,特別是在電池電壓較高的CAN通信系統(tǒng)中(如:汽車(chē)中采用雙電池的情況,或者24V卡車(chē)系統(tǒng))。
可以利用電壓轉(zhuǎn)換器產(chǎn)生所要求的電源電壓,對(duì)于低功耗、結(jié)構(gòu)簡(jiǎn)單的低成本設(shè)計(jì),電荷泵通常是最佳的選擇。它不需要昂貴的電感或額外的半導(dǎo)體器件,而且易于使用。
電荷泵的選擇
1. 收發(fā)器電源
目前市面上已有簡(jiǎn)單、功能成熟的CAN收發(fā)器,有些收發(fā)器需要單電源供電,而有些收發(fā)器需要多路電源供電。為了使來(lái)自不同ECU供應(yīng)商的模塊之間能夠正確地互操作,并實(shí)現(xiàn)遵循ISO 11898標(biāo)準(zhǔn)的高速CAN通信,絕大多數(shù)模塊需要一個(gè)滿(mǎn)足最大容限要求的5V電源。
有些收發(fā)器還帶有內(nèi)置I/O電平適配器。利用協(xié)議控制器的電源(作用在收發(fā)器單獨(dú)的電源引腳),電平適配器按比例調(diào)整收發(fā)器的I/O電平,使其達(dá)到控制器電平。由此,收發(fā)器可直接連接工作在5V以下的控制器,無(wú)需任何膠合邏輯。
低功耗管理收發(fā)器支持本地和遠(yuǎn)程喚醒,因此帶有另外一個(gè)電源引腳。該引腳必須由汽車(chē)電池持續(xù)供電且消耗的電流很小。因而ECU要求高速CAN總線(xiàn)即使在點(diǎn)火鑰匙“關(guān)閉”的條件下也必須保持有效工作。
關(guān)于CAN收發(fā)器其它引腳的功能描述,請(qǐng)參考選定器件的數(shù)據(jù)資料。
2. 電源電流
CAN總線(xiàn)通常處于兩個(gè)邏輯狀態(tài)之一:隱性或顯性(圖2)。正常通信模式下,收發(fā)器在顯性狀態(tài)下需要最大的輸入電流,隱性狀態(tài)所需的輸入電流最小。此時(shí)I/O電平適配器和遠(yuǎn)程喚醒功能所消耗的電流可以忽略,因?yàn)樗鼈兺ǔO牡氖俏⒖刂破麟娫春推?chē)電池的電流,而且數(shù)值非常小。

總線(xiàn)出現(xiàn)故障時(shí),電源電流會(huì)顯著增大,特別是在CAN_H線(xiàn)與地短路時(shí)。大多數(shù)收發(fā)器都會(huì)把短路電流限制在一個(gè)特定的最大值。為了防止電源電壓跌落,最好按照這種情況下的電流要求定義電荷泵的輸出電流規(guī)格。
基于上述考慮,為了給CAN收發(fā)器提供適當(dāng)?shù)碾娫矗箅姾杀帽仨毐3?V輸出電壓,并滿(mǎn)足收發(fā)器數(shù)據(jù)資料中的標(biāo)稱(chēng)電壓容限,最小輸出電流必須支持CAN_H短路到地的情況。
利用MAX1759電荷泵為MAX13041收發(fā)器供電
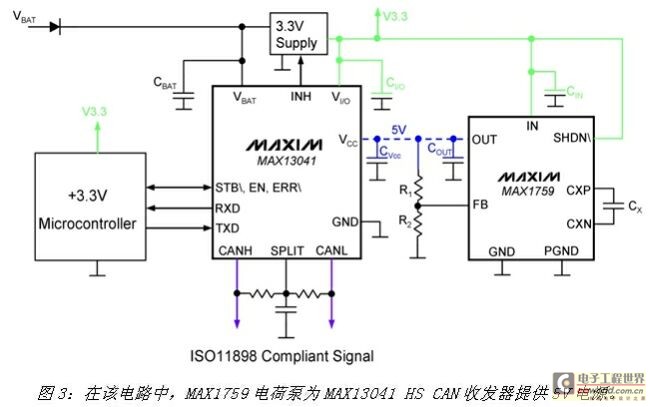
市場(chǎng)上可以找到多種傳統(tǒng)的CAN收發(fā)器和電荷泵器件,本文主要關(guān)注MAX13041 HS CAN收發(fā)器和MAX1759 buck/boost穩(wěn)壓型電荷泵的設(shè)計(jì),解決收發(fā)器供電問(wèn)題。收發(fā)器通過(guò)VCC引腳供電,為支持標(biāo)準(zhǔn)的ISO 11898 CAN通信,VCC必須保持在4.75V與5.25V之間(標(biāo)稱(chēng)工作電壓范圍)。該電壓在總線(xiàn)(CAN-H,CAN-L)之間建立正確的通信信號(hào),并在IC處于正常工作模式時(shí)為接收電路供電。
收發(fā)器的VI/O輸入使能3.3V I/O微控制器的接口電路,在控制器和收發(fā)器的接收/發(fā)送 (RxD/TxD)級(jí)建立正確的電平。當(dāng)然,當(dāng)與5V控制器通信時(shí),VI/O引腳也可以由5V電源供電。
VBAT引腳(通常連接到汽車(chē)12V電池)為具有極低靜態(tài)電流的喚醒檢測(cè)電路供電。根據(jù)CAN總線(xiàn)的信息,該引腳可以控制MAX13041從休眠模式喚醒。關(guān)于其它引腳的詳細(xì)說(shuō)明,請(qǐng)參考MAX13041數(shù)據(jù)資料。
正常通信模式下,MAX13041在顯性狀態(tài)需要的最大輸入電流(VCC引腳)為80mA,隱性狀態(tài)(圖2)下為10mA。流入VI/O和VBAT的電流可忽略不計(jì)。當(dāng)總線(xiàn)出現(xiàn)故障時(shí),VCC電源電流將顯著增大,特別是當(dāng)CAN_H信號(hào)線(xiàn)與地短路時(shí)。MAX13041將短路電流限制在IO(SC) = 95mA。
基于上述考慮,為了滿(mǎn)足CAN收發(fā)器的供電要求,電荷泵必須具有穩(wěn)定的5V輸出電壓,確保符合電壓容限的要求,最小輸出電流為95mA。
1. 電荷泵要求
MAX1759架構(gòu)允許輸入電壓高于或低于穩(wěn)壓輸出值。而本應(yīng)用中,電荷泵僅作為升壓轉(zhuǎn)換器工作。當(dāng)VIN低于VOUT時(shí),電荷泵作為穩(wěn)壓型升壓倍壓器工作。輕載下,電荷泵僅在需要維持負(fù)載的供電能量時(shí)進(jìn)行開(kāi)關(guān)操作,消耗很小的靜態(tài)電流。輕載時(shí),輸出電壓紋波不會(huì)增大。
有關(guān)電荷泵其它特性的詳細(xì)說(shuō)明,請(qǐng)參考MAX1759數(shù)據(jù)資料。
2. 實(shí)現(xiàn)3.3V方案
從圖3電路可以看出,用電荷泵為MAX13041供電非常簡(jiǎn)單。只需要把MAX1759連接到CAN收發(fā)器的VCC輸入(藍(lán)色虛線(xiàn)所示),即可產(chǎn)生滿(mǎn)足容限和輸出電流要求的5V輸出電壓。該配置允許其它電路采用低壓供電。本示例中,外部3.3V電源(綠色)為電荷泵(IN)、微控制器以及收發(fā)器的VI/O電平轉(zhuǎn)換器供電。拉高電荷泵的/SHDN,使器件置于ON狀態(tài)。MAX1759數(shù)據(jù)資料詳細(xì)介紹了關(guān)于輸入/輸出(CIN, COUT)電容和飛電容(CX)的選擇。
3. 電磁兼容性
電磁兼容(EMC)是CAN通信網(wǎng)絡(luò)的一個(gè)設(shè)計(jì)挑戰(zhàn),特別是當(dāng)采用開(kāi)關(guān)型穩(wěn)壓器供電時(shí)。CAN系統(tǒng)的網(wǎng)絡(luò)配線(xiàn)是一個(gè)關(guān)鍵問(wèn)題,由于CAN收發(fā)器的CAN_H和CAN_L引腳是連接整個(gè)汽車(chē)總線(xiàn)網(wǎng)絡(luò)的接口。設(shè)計(jì)時(shí)如果不謹(jǐn)慎,可能從CAN電源產(chǎn)生較大干擾,干擾信號(hào)通過(guò)收發(fā)器,經(jīng)過(guò)總線(xiàn)最終進(jìn)入其它ECU,或進(jìn)入鄰近的線(xiàn)纜。這種干擾將造成通信故障或系統(tǒng)其它控制單元之間的傳輸故障。
基于這一考慮,我們測(cè)試了采用MAX1759電荷泵供電的MAX13041的EMC特性,并與采用經(jīng)過(guò)濾波的5V電源供電的收發(fā)器的EMC特性進(jìn)行比較。由此,我們可以看到電荷泵的EMC干擾和電荷泵對(duì)CAN總線(xiàn)傳輸電源干擾的抑制能力。在本測(cè)試中,我們主要考慮兩個(gè)方面:電磁抗擾(EMI)和電磁輻射(EME)。
4. 電磁抗擾測(cè)試(EMI)
ISO 11452規(guī)范規(guī)定了幾種抗RF干擾的測(cè)試方法,包括大電流注入(BCI)、橫向電磁波室(TEM-cell)、帶狀線(xiàn)以及直接電源注入(DPI)。
由于DPI方法具有較好的可重復(fù)性(采用精心設(shè)計(jì)的測(cè)試板),并且測(cè)試工作量不大,因此我們選用了該方法。DPI測(cè)試原理非常簡(jiǎn)單:向總線(xiàn)電纜注入特定的經(jīng)過(guò)調(diào)制或未經(jīng)調(diào)制的交流電壓,通過(guò)收發(fā)器的RXD引腳檢測(cè)傳輸數(shù)據(jù)的信號(hào)完整性。這種方法還便于比較不同廠商的設(shè)計(jì),可以在獨(dú)立的實(shí)驗(yàn)室測(cè)試CAN收發(fā)器(如IBEE)。
5. 測(cè)試裝置
測(cè)試裝置(圖4)包括三個(gè)焊接在PCB上的相同收發(fā)器,其中一個(gè)收發(fā)器由MAX1759電荷泵供電,節(jié)點(diǎn)1作為發(fā)送器,用于仿真CAN數(shù)據(jù)的比特流模板,數(shù)據(jù)由所有收發(fā)器接收并在RxD端口進(jìn)行監(jiān)測(cè)。對(duì)于Rx1至Rx3輸出以及TxD1輸入的RF去耦,采用1k?電阻。每個(gè)收發(fā)器IC的VCC和VBAT電源端口采用陶瓷電容(C = 100nF)緩沖。喚醒引腳的電阻為33k?。將EN引腳和/STB引腳置于高電平,使器件處于正常工作模式。節(jié)點(diǎn)1的VCC電壓由MAX1759電荷泵產(chǎn)生,電荷泵由3.3V供電。3.3V電源還用作節(jié)點(diǎn)1收發(fā)器的VI/O電壓。

電荷泵輸出電容C1為10μF,飛電容C2為330nF,IN輸入引腳采用10μF電容去耦。測(cè)試電路中,總線(xiàn)端接采用60? R4電阻進(jìn)行中心端接。對(duì)稱(chēng)的RF耦合/去耦采用RC并聯(lián)網(wǎng)絡(luò),由R5/R6=120?、C3/C4=4.7nF組成。外部3.3V、5V、12V電源由標(biāo)準(zhǔn)電源提供,通過(guò)濾波網(wǎng)絡(luò)進(jìn)行濾波。
6. 測(cè)試步驟
對(duì)正常工作模式下的CAN收發(fā)器MAX13041進(jìn)行測(cè)試,在第一輪測(cè)試中,所有收發(fā)器采用標(biāo)準(zhǔn)VCC = 5V電源供電;第二輪測(cè)試中,其中一個(gè)收發(fā)器由電荷泵供電(圖4)。模板發(fā)生器產(chǎn)生占空比為50%的500kbps方波,仿真節(jié)點(diǎn)1的TXD引腳的CAN信號(hào)(交替的0-1-0數(shù)據(jù))。RF輸入HF發(fā)生器(HF1)對(duì)CAN總線(xiàn)注入一個(gè)固定頻率的調(diào)幅(AM)交流電壓,功率為36dBm,用于模擬干擾信號(hào)。
評(píng)估抑制特性,在饋入TXD的干擾信號(hào)的影響下,用示波器比較網(wǎng)絡(luò)中三個(gè)收發(fā)器的Rx信號(hào)。根據(jù)所允許的±0.9V最大電壓偏差和±0.2μs最大時(shí)間偏差確定屏蔽值,覆蓋整個(gè)TXD信號(hào)波形。
如果達(dá)到失效條件(例如,如果一個(gè)收發(fā)器的RXD信號(hào)超出了所確定的屏蔽窗口),將所注入的RF功率降至0.2dBm,并按照特定的頻率步長(zhǎng)重復(fù)相同測(cè)試,直到解除失效狀態(tài)。然后,記錄當(dāng)前的功率值并調(diào)整到下一頻率步長(zhǎng)。測(cè)試頻率范圍覆蓋10MHz至100MHz。
7. DPI測(cè)試結(jié)果
圖5所示為標(biāo)準(zhǔn)5V電源作用在VCC為MAX13041供電時(shí)的測(cè)試結(jié)果(藍(lán)色),以及由電荷泵為MAX13041供電時(shí)的測(cè)試結(jié)果(粉色)。X軸表示頻率范圍,Y軸表示沒(méi)有發(fā)生失效的情況下作允許的最大注入功率。
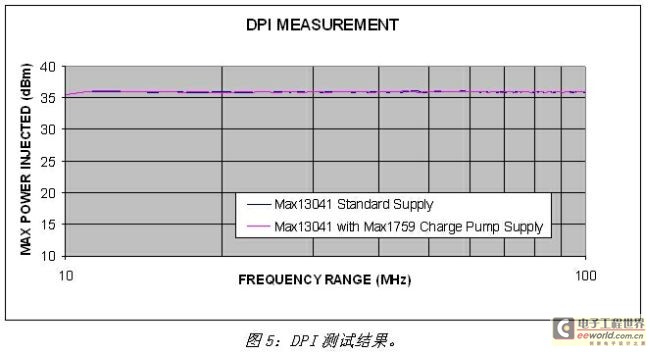
藍(lán)線(xiàn)和粉線(xiàn)幾乎相同,表明該電路的EMI特性主要取決于CAN收發(fā)器本身的EMI敏感度,而非電荷泵的EMI敏感度。因此,當(dāng)電路受到任何EMI干擾時(shí),為MAX13041 CAN收發(fā)器供電的MAX1759電荷泵不會(huì)明顯影響電路性能。
8. 輻射測(cè)試(EME)
輻射測(cè)試在同一個(gè)電路板進(jìn)行,除了將功率注入電路(HF發(fā)生器)替換為頻譜分析儀外,測(cè)試裝置與DPI測(cè)試相同。測(cè)試也是在CAN收發(fā)器正常工作模式下進(jìn)行。第一輪測(cè)試在所有收發(fā)器采用標(biāo)準(zhǔn)VCC = 5V電源供電條件下進(jìn)行;第二輪測(cè)試在一個(gè)CAN節(jié)點(diǎn)由電荷泵供電的條件下進(jìn)行。在CAN TXD輸入作用一個(gè)方波信號(hào)(仿真500kbps的傳輸比特流),CAN總線(xiàn)的輻射由頻譜分析儀在100kHz至1GHz頻率范圍內(nèi)進(jìn)行測(cè)量和記錄,無(wú)需示波器(圖4)。
9. 輻射測(cè)試結(jié)果
圖6給出了標(biāo)準(zhǔn)5V電源作用在VCC為MAX13041供電的測(cè)試結(jié)果(藍(lán)色),以及電荷泵供電條件下的MAX13041測(cè)試結(jié)果(粉色)。X軸表示頻率范圍,Y軸表示干擾信號(hào)電平。

與采用標(biāo)準(zhǔn)5V供電的MAX13041 (藍(lán)色)相比,藍(lán)線(xiàn)峰值和粉線(xiàn)峰值(其中一個(gè)收發(fā)器由電荷泵供電)幾乎相同。表明電路的輻射特性主要取決于CAN收發(fā)器的輻射兼容性,而非電荷泵。測(cè)試結(jié)果表明,采用電荷泵為CAN收發(fā)器供電并沒(méi)有明顯影響系統(tǒng)整體的EMC特性。如果選擇其他半導(dǎo)體廠家的收發(fā)器或電荷泵,最好對(duì)所選器件進(jìn)行類(lèi)似測(cè)試,因?yàn)槊總€(gè)供應(yīng)商的產(chǎn)品性能有所不同。
本文小結(jié)
在CAN應(yīng)用中,實(shí)現(xiàn)電磁兼容目標(biāo)是極具挑戰(zhàn)性的設(shè)計(jì)問(wèn)題,特別是當(dāng)收發(fā)器由開(kāi)關(guān)穩(wěn)壓器(電荷泵)供電時(shí)。但是,本文推薦的電荷泵不會(huì)對(duì)電路的EMC特性產(chǎn)生明顯影響。對(duì)于要求以低成本實(shí)現(xiàn)低功耗、低電壓工作的應(yīng)用,系統(tǒng)設(shè)計(jì)人員在沒(méi)有現(xiàn)成的5V電源的情況下,可以采用電荷泵給CAN收發(fā)器供電。