
摘 要:本文主要介紹了基于DSP" title="DSP">DSP實現(xiàn)的PWM" title="PWM">PWM整流回饋" title="整流回饋">整流回饋系統(tǒng)的設(shè)計。該設(shè)計可以做到輸入電流正弦、單位功率因數(shù)、直流母線電壓輸出穩(wěn)定,具有良好的動態(tài)性能并可實現(xiàn)能量的雙向流動(即四象限運行),最終給出實驗波形,驗證了系統(tǒng)的可行性。
1 引言
隨著電網(wǎng)諧波污染問題的日益嚴(yán)重和人們對高性能電力傳動技術(shù)的需要,人們對PWM整流技術(shù)給予了越來越多的關(guān)注。PWM整流器可以做到輸入電流正弦、單位功率因數(shù)、直流電壓輸出穩(wěn)定,具有良好的動態(tài)性能并可實現(xiàn)能量的雙向流功,也就能夠?qū)崿F(xiàn)系統(tǒng)的四象限運行,即快速制動和能量回饋。與傳統(tǒng)的整流器(即不控整流或相控整流)相比,具有很多優(yōu)點。本文主要通過系統(tǒng)方案的設(shè)計、軟件和硬件等幾個方面對系統(tǒng)進(jìn)行研究和探討,最終給出實驗波形,驗證了系統(tǒng)的可行性。
2 設(shè)計方案
根據(jù)圖1(系統(tǒng)框圖)所示,系統(tǒng)主要分為三個部分:模擬信號采集、DSP控制器和PWM驅(qū)動電路。其中模擬信號采集部分主要完成對三相交流電壓、電流的采集和直流母線電壓的采集;控制器通過采集到的模擬信號進(jìn)行算法控制,最終產(chǎn)生預(yù)期的PWM波,進(jìn)而通過驅(qū)動電路控制IGBT的通斷,來實現(xiàn)了整個系統(tǒng)的設(shè)計。
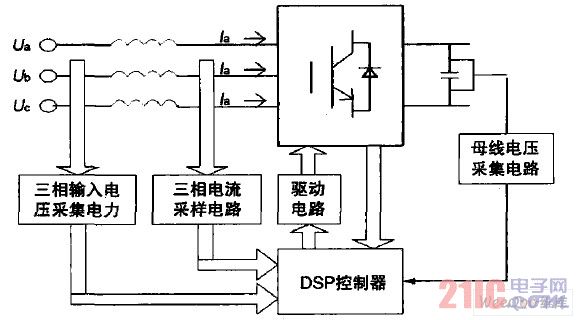
圖1 系統(tǒng)框圖
作為PWM整流回饋系統(tǒng),主要目的是實現(xiàn)單位功率因數(shù)、穩(wěn)定直流母線電壓輸出和能量的雙向流動,下面針對這三個方面對系統(tǒng)進(jìn)行探討和研究:
為實現(xiàn)整流和能量回饋的功率因數(shù)為1,同時也減少了對電網(wǎng)的污染,首先應(yīng)該對三相電壓進(jìn)行鎖相,這樣可以保證在整流時的電流相位和電壓相位同相和能量回饋時電壓相位和電流相位相差180度,因此鎖相的精度直接影響到整流和回饋時的質(zhì)量。鎖相環(huán)的設(shè)計,可以分為硬件鎖相環(huán)和軟件鎖相環(huán),采用硬件鎖相環(huán)需要在系統(tǒng)上增加新的硬件,同時也增加了成本,因此,在本設(shè)計中采用軟件鎖相技術(shù)。
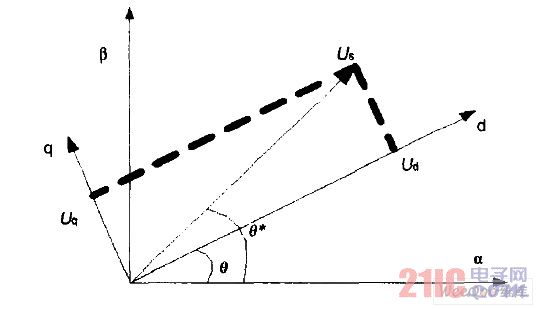
圖2 電壓矢量相位圖
如圖2所示,當(dāng)電網(wǎng)電壓幅值Us不變時,Uq直接反應(yīng)了d軸與電網(wǎng)電壓Us的相位關(guān)系,當(dāng)Uq>0時,d軸滯后于電網(wǎng)電壓Us;當(dāng)Uq<0時,d軸超前于電網(wǎng)電壓Us;當(dāng)Uq=0時,d軸與電網(wǎng)電壓Us同相。基于上述分析,設(shè)計如下鎖相環(huán)。首先虛擬一個同步角度,使其角速度與電網(wǎng)電壓相同,然后利用該角度對三相輸入電壓進(jìn)行CLARKE變換和PARK變換,使電壓矢量從三相靜止坐標(biāo)系變換到兩項旋轉(zhuǎn)坐標(biāo)系中,同時令q軸電壓的參考值為零,并將q軸電壓值和參考值送入PI調(diào)節(jié)器,PI調(diào)節(jié)器輸出為同步角度與虛擬同步角度的誤差,并將其輸出對虛擬同步角度進(jìn)行補償,再利用補償后的角度進(jìn)行PARK變換,這樣構(gòu)成一閉環(huán)控制,最終實現(xiàn)了軟件鎖相環(huán)。
圖3 鎖相環(huán)結(jié)構(gòu)框圖
為實現(xiàn)母線電壓輸出的穩(wěn)定,同時實現(xiàn)能量的雙向流動,即當(dāng)母線電壓高于期望值時,能量回饋電網(wǎng),當(dāng)母線電壓低于期望值時,能量流向基側(cè),進(jìn)行升壓。在這個環(huán)節(jié)中,采用雙閉環(huán)控制,即電流環(huán)和電壓環(huán)控制。如圖5所示,電壓環(huán)作為外環(huán)控制,根據(jù)給定電壓和實測母線電壓的關(guān)系,通過PI調(diào)節(jié)后,計算出電流的給定值;電流環(huán)作為內(nèi)環(huán)控制,根據(jù)外環(huán)計算出的電流給定值,進(jìn)行閉環(huán)控制,最終實現(xiàn)了單位功率因數(shù)整流和回饋。對三相交流信號進(jìn)行閉環(huán)控制是很困難的,精度也不高,因此,我們采用矢量分解的方式,將三相交流信號從靜止坐標(biāo)系變換到兩相旋轉(zhuǎn)坐標(biāo)系中,并對d軸和q軸信號進(jìn)行控制。

圖4 整流器交流側(cè)穩(wěn)態(tài)矢量圖
根據(jù)圖4所示,可得出PWM整流器數(shù)學(xué)模型:

由上式可以看出,變換器交流側(cè)電流的d、q軸分量存在著相互耦合項,無法對電流的d、q軸分量進(jìn)行單獨控制,給控制器的設(shè)計造成一定困難,為此,本文采用前饋解耦控制策略,利用PI調(diào)節(jié)器對其進(jìn)行解耦。解耦的具體過程如圖5的虛線部分所示。

圖5 雙閉環(huán)控制結(jié)構(gòu)圖
3 系統(tǒng)設(shè)計
本文采用TI公司的TMS320C2812" title="TMS320C2812">TMS320C2812作為主控制器,ADS7864Y作為模擬信號采集器對三相電壓和三相電流及直流母線電壓進(jìn)行采集,并采用一片CPLD進(jìn)行系統(tǒng)的邏輯控制,系統(tǒng)的硬件框圖如下圖所示。

圖6 硬件系統(tǒng)框圖
由DSP控制器周期的控制AD轉(zhuǎn)換器,對三相電壓及三相電流進(jìn)行采集,同時對母線電壓進(jìn)行采集,將采集到的三相電壓信號進(jìn)行軟件鎖相環(huán)控制,即采用上文所述的鎖相方式,最終得到一個穩(wěn)定的、準(zhǔn)確的電網(wǎng)電壓相位,為系統(tǒng)整流及回饋做準(zhǔn)備。由于ADS7864Y只有六路AD通道,所以母線電壓采用DSP控制器的內(nèi)部AD轉(zhuǎn)換器進(jìn)行轉(zhuǎn)換,并根據(jù)采集到的母線電壓進(jìn)行判斷分析,當(dāng)電壓過高時,系統(tǒng)對電網(wǎng)進(jìn)行回饋,當(dāng)電壓過低時,系統(tǒng)對基側(cè)進(jìn)行整流提升電壓。在這個過程中,最終體現(xiàn)到PWM波的輸出,PWM波的相位角度直接影響到系統(tǒng)性能,本文采用前饋解耦控制策略,即利用PI調(diào)節(jié)器對其進(jìn)行解耦,最終以空間矢量PWM波的形式輸出,實現(xiàn)系統(tǒng)的整流和回饋功能。軟件流程圖如下所示:

圖7 軟件流程圖
4 結(jié)論
本文將PWM整流逆變技術(shù)應(yīng)用于能量回饋裝置中,最終實現(xiàn)了能量的再生利用,并且保證了回饋到電網(wǎng)中的能量諧波含量低,功率因數(shù)高,不會對電網(wǎng)產(chǎn)生“污染”,驗證了系統(tǒng)方案的正確性和合理性,同時做到了經(jīng)濟(jì)、環(huán)保、節(jié)能,具有良好的經(jīng)濟(jì)效益和社會效益。