
在閥門控制和機械手臂的控制中,在斷電之后的上電,不需閥門和手臂的運動,就能檢測到閥門和手臂的位置信息。做到這點則需要一套完整的絕對值編碼器,同時在計量范圍和精度方面更有優(yōu)勢。AVAGO多圈絕對值編碼器AEAT-84AD系列,很適用于上述應用中,其優(yōu)點在于尺寸小,無需電池保留位置信息,上電能立刻檢測位置信息。
安華高AEAT-84AD產(chǎn)品介紹
1,多圈絕對值編碼器
光電編碼器" title="光電編碼器">光電編碼器在閥門控制和機械臂位置檢測中的應用(電子工程專輯)" src="http://files.chinaaet.com/images/20110225/5c671fc7-7701-4879-b535-914a01122811.jpg" />
AEAT-84AD采用透射方式、檢測多圈絕對值的光電編碼器,其基本組成是光電發(fā)射管、光電檢測以及6或者7個齒輪組成的模塊。目前提供12位或者14位分辨精度;小尺寸的直徑為55mm,高度為12.2mm;工作溫度可在-40度到125度;旋轉(zhuǎn)速度可達到12,000/分鐘;提供2×4的信號和電源連接。與ASAS-7000配合工作,可以通過高達30位的絕對值編碼輸出。
產(chǎn)品能很好的應用于半導體自動化,工業(yè)縫紉機,機器人,閥門控制等。
2,功能框圖

通過多路選擇信號MTMUX[2:0],讀出每個齒輪對應的三位信號數(shù)據(jù)MTDAT[2:0]。對于7個齒輪組的輸出,則有7組三位數(shù)據(jù)可供讀出,可以通過查找表的方式,或者簡單計算的方法得到14位的格雷碼輸出。對應6個齒輪組的輸出,轉(zhuǎn)換的格雷碼則為12位。
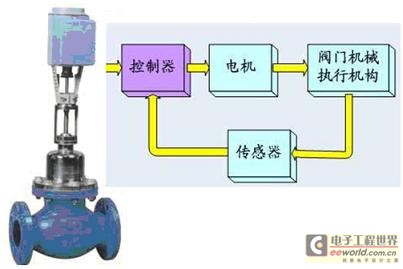
閥門控制中的應用
在機電一體化的閥門設計中,控制器根據(jù)要求或者上端輸入的命令,控制電機執(zhí)行閥門控制,并且通過絕對值編碼器進行位置反饋給控制器,形成一個閉環(huán)的控制系統(tǒng),能很好的實現(xiàn)閥門開度的控制、反饋與調(diào)節(jié)。該系統(tǒng)中,不需要電池或者存儲部件保留閥門的位置信息,在系統(tǒng)加電后可直接獲取閥門的開度信息,而不需要閥門執(zhí)行機械的額外運動。
該多圈絕對值編碼器模塊,分辨率高,可靠性高,抗干擾能力強,而且電壓范圍也達5V。模塊尺寸較小,安裝方便快捷,為整個閥門的機械設計和電路設計提供簡便,使智能電動閥門設計成為可能。
機械手臂中的應用
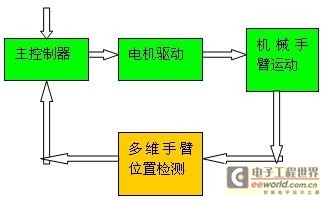
一般來說,每一維的機械手臂位置信息的反饋,都需要一路編碼器提供反饋。高精度機械手臂的應用中,比如半導體自動化的機械手臂,還可以考慮與ASAS-7000配合工作,最高可提供高達30位的多圈位置信息,為機械手臂的精確控制提供必要的反饋信息。對于AEAT-84AD,能檢測出每分鐘12,000轉(zhuǎn)的運動信息,反應非常靈敏;可以通過讀取的位置信息,計算得到機械手臂的運動速度等參數(shù)。對于多維機械手臂的運動位置,在上電時可以由主控制器讀取,這對于增量式的編碼器有很大的優(yōu)勢。
對于機械手臂的設計,AEAT-84AD高精度,高靈敏度" title="高靈敏度">高靈敏度,小尺寸,模塊化設計等優(yōu)點,能更好的應用于其中。
在多圈光電絕對值編碼器應用中,由于其位置信息不需要電池供電或其他的儲存,在系統(tǒng)上電后便能方便的讀取,這些優(yōu)點是增量編碼器所不能比擬的。其高精度,高靈敏度,快速反應,小尺寸,模塊化設計等優(yōu)點,能很好的應用在閥門控制、機械手臂、高精度位置控制部件中。
提示:該編碼器的設計中,需要避免灰塵污染,盡量做到密閉。
有關(guān)此類產(chǎn)品的詳細資料及技術(shù)支持信息,請聯(lián)系安華高大中國區(qū)授權(quán)代理商世強電訊。
作者:羅國才
應用工程師
世強電訊