
摘 要: 針對電極升降式控制的三相電弧爐弧流之間具有強耦合的特點,,提出了采用神經(jīng)網(wǎng)絡控制器" title="網(wǎng)絡控制器">網(wǎng)絡控制器,,在電流超過允許偏差時并行計算出三相電極的調節(jié)量,,達到減少調節(jié)過程和調節(jié)機構動作次數(shù)的目的,。并提出了離線" title="離線">離線訓練方法和仿真模型,。
關鍵詞: 三相電弧爐 弧流 神經(jīng)網(wǎng)絡
電弧爐是利用電弧的能量來熔煉金屬,。目前普遍采用電極升降方法對熔煉過程進行恒流控制,。電爐在工作過程中,,特別是在爐料熔化期,,當電弧強度的隨機變化引起三相電流" title="三相電流">三相電流失去平衡時,由人工或自動調節(jié)三相電流,,使其在給定的允許偏差范圍內,。但由于負載端相當于三角形連接,則外部檢測的即被控制的三相線電流相互耦合,,若不采用解耦措施,,一次擾動要經(jīng)過若干次調節(jié)才能使三相電流恢復到平衡點。結果是:其一,,使超調增大,、調節(jié)過程加長,影響產(chǎn)成品質量控制和加大能耗,;其二,,使電極升降傳動機構頻繁動作,,縮短了傳動機構的維修周期和使用壽命,并且使調節(jié)回路能耗比例增大,。而最理想的調節(jié)效果是:在只檢測三相線電流而不增加任何其它檢測量的前提下,,當三相電流超過允許偏差時,控制器一次并行地給出三相電極的調節(jié)量,,使其一次調節(jié)到位,。
考慮系統(tǒng)本身具有非線性、大滯后,、多變量,、強耦合的復合特點,為避開繁瑣的系統(tǒng)建模過程且力求系統(tǒng)簡單可靠,,又不增加觀測數(shù)據(jù),,我們采用了神經(jīng)網(wǎng)絡控制器。利用神經(jīng)網(wǎng)絡具有逼近任意非線性和并行處理數(shù)據(jù)的能力,,使訓練好的神經(jīng)網(wǎng)絡控制器可以根據(jù)三相異常電流值計算出三相電極的調節(jié)量,,從而使三相電極只調節(jié)一次便可將三相電流恢復正常。本文將在給出三相電弧爐神經(jīng)網(wǎng)絡控制器結構和算法的基礎上,,著重分析三相電弧爐神經(jīng)網(wǎng)絡控制器的離線訓練方法,,最后給出仿真實例和結論。
1 神經(jīng)網(wǎng)絡結構及控制系統(tǒng)
三相電弧爐神經(jīng)網(wǎng)絡控制系統(tǒng)如圖1所示,。

圖1中的神經(jīng)網(wǎng)絡為三層BP網(wǎng)絡,,輸入層有三個神經(jīng)元(k=1、2,、3),,分別輸入A、B和C相線電流的偏差值,,節(jié)點函數(shù)是斜率為1的線性函數(shù),,因此該層三個輸出為:

其中,IS為設定的三相電流平衡值,,IA,、IB、IC分別為三相當前實際電流值,。
隱含層有九個神經(jīng)元(j=1,、2…9),隱含層各神經(jīng)元的輸入函數(shù)為:
輸出層有三個神經(jīng)元(i=1,、2、3),,網(wǎng)絡的神經(jīng)元輸入函數(shù)為:

BP網(wǎng)絡的三個輸出out1,、out2,、out3經(jīng)過增益K即為被控對象的控制輸入,記為UAc,、UBc,、UCc。被控對象的輸出為實際電流值IA,、IB,、IC。
2 網(wǎng)絡的訓練方法和步驟
BP網(wǎng)絡的訓練條件是除需提供足夠的輸入訓練樣本外,,還要有合理的與輸入樣本對應的輸出目標值,,即輸入與輸出之間客觀地存在著用解析方法難以描述的映射關系,而網(wǎng)絡離線訓練的目的就是要找到合適的網(wǎng)絡權值Wjk和Wij以滿足這種映射關系,。對于本系統(tǒng)的BP網(wǎng)絡訓練來說,,首先就要找到輸入樣本ΔIA、ΔIB,、ΔIC與輸出的調節(jié)量(BP網(wǎng)絡的目標值)out1,、out2、out3的映射域,。這可以在現(xiàn)場實測取得數(shù)據(jù),。但我們采用了與實際相符的模擬方法,利用網(wǎng)絡訓練本身的功能找到輸出/輸入的映射關系,,這也就是網(wǎng)絡訓練的第一步,。在第一步的訓練中要包括被控對象,被控對象的模型處理如下:
考慮到電弧爐在平衡點附近工作時,,認為進線電壓" title="線電壓">線電壓基本不變,,這樣爐內各種因素引起弧流的變化最終歸結為阻抗的變化,在這種條件下,,用電路理論可以建立電弧爐三相阻抗與三相不平衡" title="不平衡">不平衡電流之間的一組非線性方程:
式(5)中:IA,、IB、IC分別為A,、B,、C相線電流值;ZAB,、ZBC,、ZCA為三相Δ形連接的阻抗值;三相線電壓UAB=UBC=UCA=110V,。若已知三相電流值,、可通過解此非線性方程組求得三相阻抗值。有了式(5)被控對象的仿真模型,就可以進行網(wǎng)絡訓練的第一步,。
2.1 網(wǎng)絡訓練的第一步——求取網(wǎng)絡輸出/輸入樣本的映射集
在第一步的訓練中,,包括被控對象在內,進行單點樣本訓練,。網(wǎng)絡輸入一點的三相電流偏差樣本ΔIA,、ΔIB、ΔIC,,通過網(wǎng)絡訓練使三相輸出電流消除偏差,,這時記錄下BP網(wǎng)絡的輸出控制量out1、out2,、out3,。這便找到了BP網(wǎng)絡單點樣本的輸出/輸入映射,對整個樣本空間均如此映射便得到映射集,。
控制器輸出的控制量在實際當中是電極升降的調節(jié)量,,調節(jié)電極的最終結果是使三相阻抗恢復平衡以達到電流平衡的目的,在模擬系統(tǒng)中無法處理和表達電極位置和弧流之間的關系,。模擬過程采用了這樣的處理方法:已知三相不平衡線電流可由式(5)解出三相不平衡阻抗,,通過改變進線電壓值也可使電流恢復平衡,其效果與調節(jié)電極是一樣的,。在單點訓練中網(wǎng)絡就是在不斷地修改權值以尋求使三相線電流恢復平衡狀態(tài)所需的三相線電壓UAC,、UBC、UCC,。而BP網(wǎng)絡的輸出的調節(jié)量out1,、out2、out3(相對值)就表示了電極的位移量和升降方向,,所有的輸入樣本訓練完之后也就得到了BP網(wǎng)絡成批訓練的目標集,。
2.2 網(wǎng)絡訓練的第二步——得到控制器模型
在第二步訓練中去掉被控對象,利用第一步已取得的輸出/輸入樣本映射數(shù)據(jù)作為輸入/輸出矢量對BP網(wǎng)絡進行成批訓練,,便得到了兩層網(wǎng)絡的連接權矩陣即控制器模型,。
輸入樣本按目標值±20%范圍選取,三相電流偏差組合共用了729組樣本值,。在訓練誤差小于1%且對學習速率,、動量因子進行適當?shù)恼{整之后,網(wǎng)絡的收斂性令人滿意,。
3 系統(tǒng)仿真
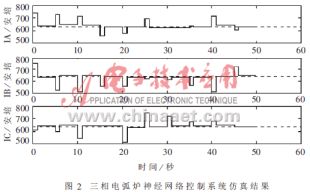
為了檢驗三相電弧爐神經(jīng)網(wǎng)絡控制器的性能,,作者進行了大量的仿真研究。圖2是利用MATLAB的GUI(Graphics User Interface)工具進行圖形仿真的結果,。仿真輸入數(shù)據(jù)為樣本域內的任意隨機量,,三相電流目標值設定為635A,,設采樣周期為5秒,即每隔5秒用隨機數(shù)產(chǎn)生一組異常三相電流值,,經(jīng)過神經(jīng)網(wǎng)絡計算后產(chǎn)生一組三相電極升降調節(jié)量,;這組三相電極升降調節(jié)量可以將三相電流調回到允許偏差范圍內。這里設偏差范圍為:

仿真結果表明,,神經(jīng)網(wǎng)絡控制器可以對三相電弧爐控制系統(tǒng)這一類強耦合的非線性多變量對象實現(xiàn)有效的控制,系統(tǒng)的靜,、動特性均能滿足指標要求,。
該控制器已被成功地應用到鞍山地區(qū)的一家電熔鎂廠的電弧爐弧流控制系統(tǒng)中,比原系統(tǒng)根據(jù)操作經(jīng)驗歸納出來的專家算法控制更準確,,調節(jié)過程明顯縮短,,振蕩的幅度及次數(shù)顯著減少。這對于降低能耗,、提高產(chǎn)成品質量,、增長設備運行壽命以此增加企業(yè)經(jīng)濟效益有著明顯的作用。另外這種離線訓練神經(jīng)網(wǎng)絡控制器的方法和過程簡單,、實用,、沒有建模及控制算法分析這一繁瑣過程、實時工作可靠,。
參考文獻
1 管立智.冶金機械自動化.北京:冶金工業(yè)出版社,,1998:46~54
2 王永驥,涂 鍵.神經(jīng)元網(wǎng)絡控制,,北京:機械工業(yè)出版社,,1998:32~54
3 舒懷林.PID神經(jīng)元網(wǎng)絡多變量控制系統(tǒng)分析. 自動化學報,1993,;25(1):105~111
4 花 皚,,吳培珍.神經(jīng)網(wǎng)絡支持的智能電弧爐調節(jié)器.工業(yè)加熱,1999,;6:6~9
5 樓順天,,施 陽,基于MATLAB的系統(tǒng)分析與設計——神經(jīng)網(wǎng)絡.西安:西安電子科技大學出版社,,1998