
摘要:近代雷達(dá)多通道接收機(jī)采用機(jī)械電位器進(jìn)行通道間幅度校準(zhǔn),機(jī)械電位器不能在艦栽機(jī)的濕熱及高震動(dòng)條件下穩(wěn)定可靠的工作,為避免這一缺點(diǎn),擬采用數(shù)字電位器替代機(jī)械電位器。在分析了現(xiàn)有機(jī)械電位器應(yīng)用電路的基礎(chǔ)上,提取出數(shù)字電位器性能指標(biāo)要求,然后使用數(shù)字電位器模型進(jìn)行了分析、仿真。最后選用X9312進(jìn)行了常溫試驗(yàn)和高低溫試驗(yàn),實(shí)驗(yàn)結(jié)果表明數(shù)字電位器可以替代機(jī)械電位器進(jìn)行多通道接收機(jī)幅度較準(zhǔn),從而使改進(jìn)后的多通道接收機(jī)適用于艦載機(jī)的工作環(huán)境。
關(guān)鍵詞:數(shù)字電位器;機(jī)械電位器;雷達(dá)多通道接收機(jī);X9312
雷達(dá)多通道接收機(jī)要求各通道在輸入同一信號(hào)時(shí),輸出信號(hào)幅度差控制在一定的范圍內(nèi)。多通道接收機(jī)會(huì)用一個(gè)可調(diào)環(huán)節(jié)來保證通道增益的一致性。某種雷達(dá)接收機(jī)通過調(diào)整機(jī)械電位器來調(diào)整放大器的增益,從而保證通道一致性。但是機(jī)械電位器不適用工作于艦載機(jī)的高濕熱及震動(dòng)條件下,所以本文討論用數(shù)字電位器替代機(jī)械電位器的可行性及要求。
1 機(jī)械電位器與數(shù)字電位器優(yōu)缺點(diǎn)
機(jī)械電位器是無源器件,阻值連續(xù)可調(diào),連接使用方便。但有以下缺點(diǎn):不容易從雷達(dá)接收機(jī)外部調(diào)節(jié);抗震性能不好;端子有機(jī)械磨損,時(shí)間久了阻值會(huì)變化。生產(chǎn)過程中其調(diào)整次數(shù)有限;調(diào)整周期長;調(diào)整端子需要涂覆固定。工作于艦載機(jī)等高濕熱、震動(dòng)條件時(shí),機(jī)械電位器環(huán)境適應(yīng)性差問題突出。
數(shù)字電位器為采用集成電路工藝制成的三端可變電阻器件,具有以下優(yōu)點(diǎn):無滑片磨損;重復(fù)性好,密封性好,不易受污染,防潮濕,抗震動(dòng),抗沖擊。生產(chǎn)時(shí)容易與單片機(jī)或計(jì)算機(jī)接口,可從分組件外自動(dòng)調(diào)節(jié)。調(diào)整后的電阻值基本不受溫度、濕度、壓力等環(huán)境因素的影響,使用壽命長,能提高系統(tǒng)的可靠性。以上特性為其工藝本身所特有的優(yōu)點(diǎn),所以只要其電性能可以替代機(jī)械電位器,就可以提高電路的環(huán)境適應(yīng)性。
2 現(xiàn)有機(jī)械電位器電路分析
為保證選用數(shù)字電位器后對(duì)目前電路兼容,先對(duì)現(xiàn)有機(jī)械電位器工作電路進(jìn)行分析。
機(jī)械電位器應(yīng)用于可調(diào)增益放大器的原理如圖1所示。圖1中V_ADJ是可調(diào)增益放大器的增益調(diào)整端,改變V_ADJ電壓可調(diào)整通道的增益,R1為2 kΩ可調(diào)電阻,R2為固定電阻,調(diào)整R1的阻值間接改變了放大器的增益。實(shí)測的放大器V_ADJ電壓與輸出增益之間的關(guān)系如表1所示。

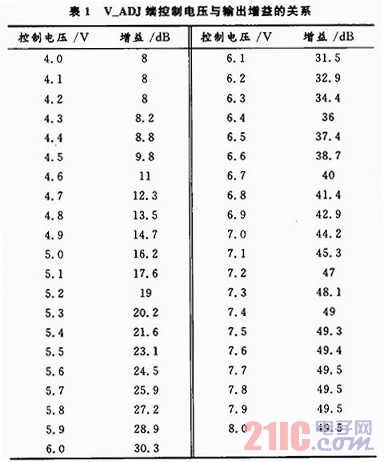
由此繪制的控制電壓與增益之間的曲線如圖2所示。

分析其中的線性增益部分,可得以下結(jié)論:調(diào)整機(jī)械電位器實(shí)際改變了控制端的電壓,該電壓在4.4~7.4 V范圍內(nèi)每增加0.1 V,輸出增益增加約1.38 dB。該指標(biāo)是數(shù)字電位器的選型基礎(chǔ)。
3 數(shù)字電位器基本原理
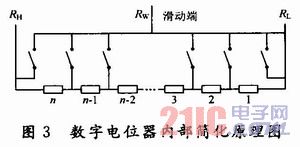
數(shù)字電位器內(nèi)部簡化原理如圖3所示。將n只結(jié)構(gòu)相同的電阻串聯(lián)在RH,RL之間,每只電阻的兩端分別經(jīng)過一個(gè)由CMOS管或者NMOS管構(gòu)成的模擬開關(guān)連在一起,作為數(shù)字電位器的抽頭,這種模擬開關(guān)等效為單刀單擲開關(guān),在數(shù)字信號(hào)的控制下每次只能有一個(gè)模擬開關(guān)閉合,從而將串聯(lián)電阻的一個(gè)節(jié)點(diǎn)連接到滑動(dòng)端。
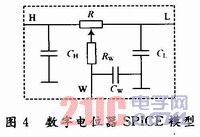
對(duì)數(shù)字電位器集成電路進(jìn)行計(jì)算機(jī)仿真的SPICE(Simulation Program with Intergrate Circuit Emphasis)模型如圖4所示。其中R為數(shù)字電位器的總電阻,RW為滑動(dòng)端電阻,CW為滑動(dòng)端的電容,CH和CL分別為數(shù)字電位器高端、低端對(duì)地的電容,因所論述的數(shù)字電位器工作在近似直流的條件下,所以不考慮其中的分布電容對(duì)電路性能的影響。
4 數(shù)字電位器選型過程
數(shù)字電位器選型時(shí)主要考慮以下指標(biāo):觸點(diǎn)數(shù);總阻值及誤差;引腳電壓;滑動(dòng)端電阻及最大電流;溫度系數(shù)。
4.1 觸點(diǎn)數(shù)選擇
因所選數(shù)控電位器線性控制電壓在4.4~7.4 V之間,所以計(jì)算可得數(shù)字電位器觸點(diǎn)數(shù)與最高控制精度之間的關(guān)系如表2所示。
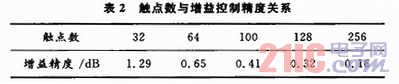
兼顧指標(biāo)和成本,選擇數(shù)字觸點(diǎn)數(shù)為100或128的數(shù)字電位器。
4.2 數(shù)字電位器滿量程電阻值選擇
數(shù)字電位器常見的滿量程阻值有以下幾種:1 kΩ,10 kΩ,50 kΩ。
數(shù)字電位器阻值選取時(shí)需考慮:其工作電流要遠(yuǎn)大于V_ADJ端的電流,同時(shí)最大工作電流一般不超過3 mA。所以選取阻值為10 kΩ。
4.3 數(shù)字電位器其他參數(shù)選擇
4.3.1 工作電壓選擇
由上述電路分析可知,數(shù)字電位器的I/O端口工作電壓為0~15 V。
4.3.2 接口選擇
數(shù)字電位器常見的接口包括以下8種:按鍵式接口,單線接口,I2C總線接口,三線加減式串行接口,SPI總線接口,Microwire總線接口和兩線并行接口。受多通道接收機(jī)PCB板上面積限制,所選器件在保證性能的前提下優(yōu)先選擇引腳數(shù)比較少的器件。
4.3.3 偏置電路選擇
為保證數(shù)字電位器步進(jìn)精度,在總阻值為10 kΩ時(shí),分壓范圍需處于4.4~7.4 V,所以需要為其選擇合適的分壓電阻R1和R2,其仿真電路如圖5所示,仿真結(jié)果如圖6所示。
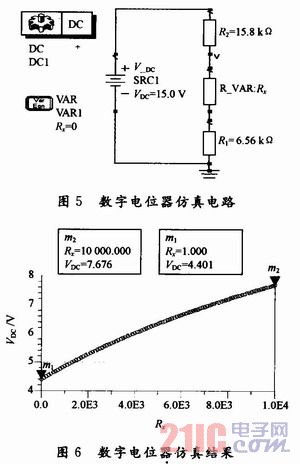
由圖5和圖6可見,在選取R1=6.56 kΩ和R2=15.8 kΩ后,可調(diào)電位器的阻值步進(jìn)使控制電壓處于線性段,從而達(dá)到線性調(diào)節(jié)通道增益的目的。
5 數(shù)字電位器X9312
X9312為Intersil公司的數(shù)字電位器,其主要性能參數(shù)如表3所示。
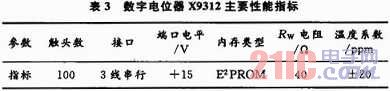
由表3可知,X9312滿足多通道接收機(jī)增益調(diào)整電路對(duì)數(shù)字電位器的所有要求,下面主要對(duì)該器件RW電阻和溫度系數(shù)對(duì)控制端電壓的影響及接口設(shè)計(jì)進(jìn)行簡要分析。
5.1 滑動(dòng)端電阻RW對(duì)控制端電壓的影響
RW為數(shù)字電位器的觸頭電阻,電路中相當(dāng)于在圖3所示的R2和R_VAR之間串聯(lián)了一個(gè)40 Ω的電阻。該電阻與R2(15.8 kΩ)串聯(lián)分壓最大為75 nV,所以可忽略該電阻對(duì)通道增益的影響。
5.2 溫度系數(shù)對(duì)控制端電壓的影響
X9312溫度系數(shù)為±20 ppm,當(dāng)R_VAR阻值為10 kΩ時(shí),全溫度范圍內(nèi)電阻值變化為±0.2 Ω,對(duì)分壓基本無影響,所以認(rèn)為數(shù)字電位器阻值在全溫度范圍內(nèi)不變。
5.3 數(shù)字電位器控制電路設(shè)計(jì)
數(shù)字電位器通過處理機(jī)和三根數(shù)據(jù)線進(jìn)行電阻的調(diào)節(jié)和數(shù)據(jù)的鎖存,在此不詳細(xì)分析其控制時(shí)序,僅討論端的電路設(shè)計(jì)。
端在器件工作期間保持為低電平。當(dāng)端和端同時(shí)為高時(shí)將當(dāng)前的寄存器數(shù)據(jù)鎖存入存儲(chǔ)器,達(dá)到重新上電后數(shù)字電位器阻值不變的目的。所以端需要工作在高或者低的狀態(tài)下,為達(dá)到該目的,將端通過10 kΩ下拉電阻進(jìn)行接地。加過下拉電阻后的端正常工作時(shí)為低電平,需要鎖存數(shù)據(jù)時(shí),外部將該端電平設(shè)置為高即可。控制接口電路圖如圖7所示。

6 高低溫測試數(shù)據(jù)分析
在高溫和低溫條件下對(duì)數(shù)字電位器電路進(jìn)行測試,為了忽略放大器增益隨溫度變化對(duì)數(shù)字電位器分壓特性的影響,選擇測量V_ADJ端電壓進(jìn)行記錄。只要V_ADJ端控制電壓控制特性良好就說明數(shù)字電位器有良好的分壓特性。
全溫度范圍內(nèi)測得的V_ADJ端電壓與仿真及計(jì)算結(jié)果相同,控制端電壓變化小于1 mV,所以僅用常溫?cái)?shù)據(jù)繪制V_ADJ電壓與數(shù)字電位器控制值的關(guān)系。結(jié)果如圖8所示。

由圖8可知,當(dāng)數(shù)字電位器的控制值步進(jìn)時(shí),V_ADJ端電壓近似線性地進(jìn)行步進(jìn),從而使放大器增益以0.47 dB步進(jìn)調(diào)整。證明可以用數(shù)字電位器來代替模擬電位器進(jìn)行多通道接收機(jī)的幅度校準(zhǔn)。
7 結(jié)語
由上述論述可知,X9312完全可以滿足雷達(dá)多通道接收機(jī)對(duì)增益調(diào)整的要求。所需外圍電路與傳統(tǒng)的機(jī)械電位器相比有所增加,但是可以明顯地提高雷達(dá)多通道接收機(jī)在溫度、濕熱和振動(dòng)條件下的可靠性。