
摘要:鐵路檢測儀系統(tǒng)設計中,采用光纖陀螺儀完成對鐵路平順度相關參數的采集,使用電壓補償方法解決所采集角度的相對零點數據浮動問題,并推導了該方法的計算過程。實驗表明,該方法達到了預期目標,數據穩(wěn)定性得到明顯改善。
關鍵詞:鐵路平順度;光纖陀螺儀;電壓補償
引言
鐵路軌道平順度的各項參數能否滿足鐵路檢測要求,關系著行車安全和乘客的舒適度。鐵路檢測儀是對鐵路的軌距、水平、軌向、高低等參數進行采集并處理的鐵路軌道檢測設備。其中,軌向和高低采集電路的設計比較復雜。本文主要介紹在鐵路檢測儀中,軌向和高低兩個參數采集的硬件和軟件設計。
1 系統(tǒng)總體設計
鐵路檢測儀利用兩個單軸光纖陀螺儀分別作為軌向和高低兩個參數的傳感器,配合硬件電路實現這兩個參數的數據采集。陀螺儀是一種角速度傳感器,它具有精度高、響應快、抗震動等優(yōu)點。隨著其性價比的提高,目前已經在民用領域里得到廣泛應用。該檢測儀中利用兩個單軸光纖陀螺儀測量鐵路平順度中軌向和高低的變化。陀螺儀輸出的電壓信號與角速度具有一定的比例關系,通過采集電壓信號推導出角速度,然后再通過積分處理計算出角度變化,最后根據鐵路平順度檢測的一些算法映射出鐵路的軌向和高低兩個參數的變化曲線。
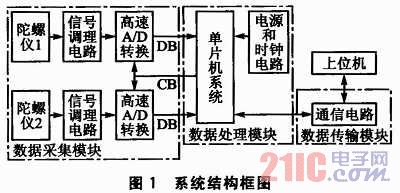
檢測儀的數據采集系統(tǒng)結構框圖如圖1所示。該系統(tǒng)包括數據采集模塊、數據處理模塊和數據傳輸模塊。數據采集模塊包括信號調理電路和高速A/D轉換電路,其主要功能是完成對兩路陀螺儀信號的調理和A/D轉換;數據處理模塊主要實現響應采集命令、完成陀螺信號的積分處理等功能;數據傳輸模塊則負責把數據處理模塊處理后的數據上傳給上位機。上位機主要實現采集數據的接收、數據格式轉換、數據存儲、數據調用、數據分析以及良好的人機交互等功能。另外,該系統(tǒng)還要通過數據傳輸模塊實現與其他數據采集系統(tǒng)的數據交互等功能。
由于鐵路軌道比較平緩,陀螺儀輸出的信號較微弱,易受其他噪聲污染而被淹沒,所以前端陀螺儀信號能否得到妥善處理關系到整個系統(tǒng)設計的成敗。下面詳細介紹系統(tǒng)中陀螺儀信號采集電路的設計。
2 硬件設計
系統(tǒng)數據采集原理如圖2所示。首先對陀螺儀輸出信號進行信號濾波、信號放大、信號平移等信號調理措施,然后對調理后的信號進行A/D轉換,最后用單片機對信號進行采集和處理,并把數據處理結果上傳給上位機進行數據顯示等。

該系統(tǒng)選用的陀螺儀信號輸出電壓范圍為-3~+3 V,在實際使用中,其輸出電壓在-O.03~+O.03 V之間浮動。由于陀螺輸出的信號較弱,而選用的A/D芯片有效的轉換電壓范圍是0~3 V,所以對陀螺儀輸出信號放大10倍,并平移1.5 V,這樣就能保證信號能在A/D芯片有效的信號采集范圍內。設定陀螺輸出信號為Vin,進入A/D芯片的信號電壓為Vi,那么就有:
Vi=10×Vin+1.5 V
由于Vin輸出電壓信號很微弱,如果此處平移的1.5 V不夠精確,就會直接降低陀螺儀信號的準確性,因此對信號平移電路的設計提出了很高的要求。為此電路中采用了ADR433A芯片,盡量保證獲取1.5 V電壓的精度。根據上述分析,設計的信號采集電路如圖3所示。A/D轉換芯片采用ADS8381。

3 軟件設計
3.1 軟件流程
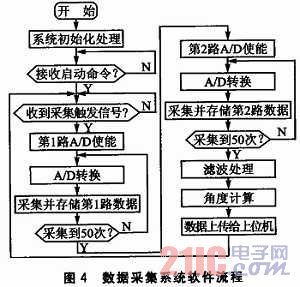
數據采集系統(tǒng)軟件流程如圖4所示。系統(tǒng)接收到啟動命令后,開始啟動系統(tǒng)電路。啟動后,系統(tǒng)首先等待采集觸發(fā)信號。當接收到采集觸發(fā)信號時,單片機發(fā)送信號分別選取兩路A/D芯片工作,A/D芯片分別對兩路陀螺儀輸出數據進行A/D轉換。由于選用的A/D芯片的轉換速率為580 kHz,能夠在0.18 ms內完成100次數據采集,實際上每路陀螺信號采集50次求平均值,因此可以認為兩路信號是同時被采集的。然后,單片機對采集到的兩組數據分別進行數據濾波、角速度計算等處理以獲取角度數值,并把這兩組數據上傳給上位機進行后續(xù)處理。
3.2 電壓補償推導
陀螺儀在靜止狀態(tài)下輸出的電壓信號為零,當陀螺儀的姿態(tài)持續(xù)改變時,其輸出的信號也會隨之改變。基于陀螺儀的這種特性,檢測儀開始運行前默認陀螺儀輸出的電壓為0 V,并以平移的1.5 V作為相對零點。在實驗過程中發(fā)現,所采集的軌向和高低數據與理論推算值浮動較大,針對這一問題,在該系統(tǒng)中采用電壓補償方法進行解決。本文提出了動態(tài)電壓補償方法,提高了實際相對零點精度。在介紹這種方法的推導之前,先說明一些符號的含義。
SF:標度因數(比例系數)。
Ugyro:陀螺儀輸出信號電壓。
Ucode:理想狀態(tài)下,A/D轉換前獲取電壓轉換的二進制編碼。理想狀態(tài)下,P·Ucode=10·Ugyro+1.5 V。
注意:A/D轉換前獲取的電壓為陀螺輸出信號放大10倍且平移1.5 V后的信號。
Ucode0:實際測量條件下,A/D轉換前獲取電壓轉換的二進制編碼。
ω:陀螺輸出的角速度。ω=Ugyro/SF=(P·Ucode-1.5 V)/(10SF)。
理論上,陀螺儀輸出信號被放大10倍并平移1.5 V,陀螺輸出的信號經過單片機處理后上傳給上位機。連續(xù)狀態(tài)下陀螺儀的角度計算如下:

以上是理想情況下推導的角度計算公式,但是根據實驗采集的數據發(fā)現,靜態(tài)情況下每次采集的數據會在一個常數上下浮動。為了減小電路對所采數據的影響,下面采用動態(tài)電壓補償方法計算推導角度。陀螺儀連續(xù)狀態(tài)角度推導:

其中,Ucode0表示靜態(tài)情況下,相對電壓經A/D芯片轉換后的二進制;Ucode.i表示實時采集的電壓經A/D芯片轉換后的二進制;ti表示每次的積分時間。
4 實驗分析
采用動態(tài)電壓補償前采集的數據如表1所列。

理論上,陀螺在靜止狀態(tài)陀螺儀輸出的電壓應該為0 V,對應的角度也應該為0°,即使考慮到其他干擾影響,采集的數據也會在0°附近浮動。但是從表中可以看出,軌向的角度在1.44°浮動,高低的角度在2.3°浮動。
采用動態(tài)電壓補償后采集的數據如表2所列,表中是兩組起始點開始采集的5個數據。

從表中可以看出,采集的角度在0°附近浮動很小,數據穩(wěn)定性有了很好的改善,而且其起始點數據也比較穩(wěn)定。通過對檢測儀相對零點信號的多次采集,很好地解決了數據的相對零點不穩(wěn)定問題。
結語
鐵路檢測儀中采用兩個單軸光纖陀螺儀作為鐵路平順度其中兩個參數軌向和高低的傳感器,完成對鐵路軌道平順度的高速、高精度的數據采集。同時,通過與先前采集的數據比較分析,采用動態(tài)電壓補償方法很好地解決了數據的相對零點浮動問題,滿足了實際工程需要。