
隨著全球經(jīng)濟(jì)的發(fā)展,能源問題日益尖銳,越來越多的國(guó)家開始關(guān)注能源利用及轉(zhuǎn)換效率的問題。光伏發(fā)電具有無污染、無噪音、取之不盡、用之不竭等優(yōu)點(diǎn),因而越來越受關(guān)注。但是由于光伏系統(tǒng)本身非線性和光電池制造工藝復(fù)雜的特點(diǎn),導(dǎo)致其轉(zhuǎn)換效率一般為14%~15%。為了讓太陽能電池陣列在同樣日照、溫度的條件下輸出更多的電能,提出了最大功率點(diǎn)跟蹤(MPPT)問題。
MPPT本質(zhì)上是一個(gè)尋優(yōu)過程。通過測(cè)量電壓、電流和功率,以及比較它們之間的變化關(guān)系,決定當(dāng)前工作點(diǎn)與峰值點(diǎn)的位置關(guān)系,然后控制電流(或電壓)向當(dāng)前工作點(diǎn)與峰值功率點(diǎn)移動(dòng),最后控制電流(或電壓)在峰值功率點(diǎn)附近一定范圍內(nèi)來回?cái)[動(dòng)。模糊控制適應(yīng)性強(qiáng),魯棒性好,作為一種新的控制思想,非常適合用在對(duì)于太陽能光伏發(fā)電這種包含許多不確定量,而且很難用精確的數(shù)學(xué)模型描述出來的系統(tǒng)。
1 光伏特性
光伏電池相當(dāng)于具有與受光面平行的極薄PN截面的大面積等效二極管,其等效電路如圖1所示。
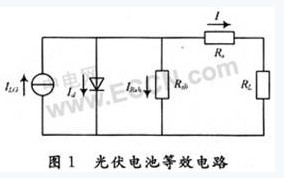
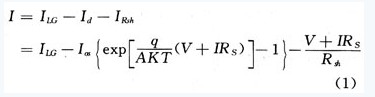
在圖1中,I為太陽能電池輸出電流;Id為二極管工作電流;Irsh為漏電流;ILG為led/'''' target=''''_blank''''>光電池電流源;Rsh為光伏電池的并聯(lián)等效電阻;Rs為光伏電池的串聯(lián)等效電阻。由圖1得到光伏電池的輸出特性方程為:
式中:
前式表明,并聯(lián)電阻Rsh越大,越不會(huì)影響短路電流的數(shù)值。所以設(shè)計(jì)中可忽略Rsh,而得到簡(jiǎn)化的光伏電池輸出特性方程:

式(1)~式(4)中:I為光伏電池輸出電流;V為光伏電池輸出電壓;Ios為光伏電池暗飽和電流T為光伏電池的表面溫度;K為波爾茲曼常數(shù)(1.38×10-23J/K);λ為日照強(qiáng)度;q為單位電荷(1.6×10-19C);k1為短路電流的溫度系數(shù);ISCR為標(biāo)準(zhǔn)測(cè)試條件(光伏電池溫度25℃,日照強(qiáng)度為1 000 W/m2)下,光伏電池的短路電流;ILG為光電流;EGO為半導(dǎo)體材料的禁帶寬度;Tr為參考溫度(301.18 K);Ior為Tr下的暗飽和電流;A,B為理想因子,一般介于1和2之間。
隨著全球經(jīng)濟(jì)的發(fā)展,能源問題日益尖銳,越來越多的國(guó)家開始關(guān)注能源利用及轉(zhuǎn)換效率的問題。光伏發(fā)電具有無污染、無噪音、取之不盡、用之不竭等優(yōu)點(diǎn),因而越來越受關(guān)注。但是由于光伏系統(tǒng)本身非線性和光電池制造工藝復(fù)雜的特點(diǎn),導(dǎo)致其轉(zhuǎn)換效率一般為14%~15%。為了讓太陽能電池陣列在同樣日照、溫度的條件下輸出更多的電能,提出了最大功率點(diǎn)跟蹤(MPPT)問題。
MPPT本質(zhì)上是一個(gè)尋優(yōu)過程。通過測(cè)量電壓、電流和功率,以及比較它們之間的變化關(guān)系,決定當(dāng)前工作點(diǎn)與峰值點(diǎn)的位置關(guān)系,然后控制電流(或電壓)向當(dāng)前工作點(diǎn)與峰值功率點(diǎn)移動(dòng),最后控制電流(或電壓)在峰值功率點(diǎn)附近一定范圍內(nèi)來回?cái)[動(dòng)。模糊控制適應(yīng)性強(qiáng),魯棒性好,作為一種新的控制思想,非常適合用在對(duì)于太陽能光伏發(fā)電這種包含許多不確定量,而且很難用精確的數(shù)學(xué)模型描述出來的系統(tǒng)。
1 光伏特性
光伏電池相當(dāng)于具有與受光面平行的極薄PN截面的大面積等效二極管,其等效電路如圖1所示。
在圖1中,I為太陽能電池輸出電流;Id為二極管工作電流;Irsh為漏電流;ILG為led/'''' target=''''_blank''''>光電池電流源;Rsh為光伏電池的并聯(lián)等效電阻;Rs為光伏電池的串聯(lián)等效電阻。由圖1得到光伏電池的輸出特性方程為:
式中:
前式表明,并聯(lián)電阻Rsh越大,越不會(huì)影響短路電流的數(shù)值。所以設(shè)計(jì)中可忽略Rsh,而得到簡(jiǎn)化的光伏電池輸出特性方程:
式(1)~式(4)中:I為光伏電池輸出電流;V為光伏電池輸出電壓;Ios為光伏電池暗飽和電流T為光伏電池的表面溫度;K為波爾茲曼常數(shù)(1.38×10-23J/K);λ為日照強(qiáng)度;q為單位電荷(1.6×10-19C);k1為短路電流的溫度系數(shù);ISCR為標(biāo)準(zhǔn)測(cè)試條件(光伏電池溫度25℃,日照強(qiáng)度為1 000 W/m2)下,光伏電池的短路電流;ILG為光電流;EGO為半導(dǎo)體材料的禁帶寬度;Tr為參考溫度(301.18 K);Ior為Tr下的暗飽和電流;A,B為理想因子,一般介于1和2之間。
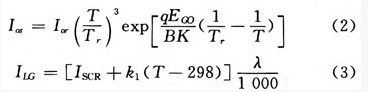
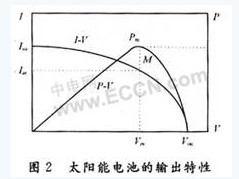
當(dāng)負(fù)載RL從0變化到無窮大時(shí),即可得到如圖2所示太陽能電池的輸出特性曲線。調(diào)節(jié)負(fù)載電阻RL到某一值Rm時(shí),在曲線上得到一點(diǎn)M,其對(duì)應(yīng)的工作電壓和工作電流之積最大,即Pm=ImVm。現(xiàn)將此M點(diǎn)定義為最大功率輸出點(diǎn)(MPP)。
2光伏系統(tǒng)的最大功率點(diǎn)跟蹤
在光伏系統(tǒng)中,通常要求光伏電池的輸出功率保持在最大,也就是讓光伏電池工作在最大功率點(diǎn),從而提高光伏電池的轉(zhuǎn)換效率。MPPT就是一個(gè)不斷測(cè)量和不斷調(diào)整以達(dá)到最優(yōu)的過程,它不需要知道光伏陣列精確的數(shù)學(xué)模型,而是在運(yùn)行過程中不斷改變可控參數(shù)的整定值,使得當(dāng)前工作點(diǎn)逐漸向峰值功率點(diǎn)靠近,使光伏系統(tǒng)運(yùn)作在峰值功率點(diǎn)附近。
對(duì)于電阻型負(fù)載,其負(fù)載線與I-V曲線的交叉點(diǎn)決定了光伏電池的工作點(diǎn)。不同的負(fù)載RL決定了不同的工作點(diǎn)。因此在不同溫度、日照強(qiáng)度條件下,當(dāng)最大功率點(diǎn)發(fā)生漂移時(shí),可通過調(diào)整負(fù)載使光伏電池重新工作在最大功率點(diǎn)處。關(guān)于光伏電池的最大功率點(diǎn)跟蹤算法,先前許多文獻(xiàn)已提出過多種方法,如電壓回授法、擾動(dòng)觀察法、功率回授法、直線近似法、實(shí)際測(cè)量法和增量電導(dǎo)法。
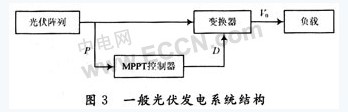
然而,在光伏組件環(huán)境變化復(fù)雜的情況下,這些方法不能即時(shí)追蹤,迅速反應(yīng)。常規(guī)方法只能收斂到局部最高運(yùn)行點(diǎn),卻不是P-V曲線的真正最高點(diǎn)。于是提出了占空比擾動(dòng)法。圖3為一般光伏發(fā)電系統(tǒng)的結(jié)構(gòu),MPPT控制器通過調(diào)整PWM信號(hào)的占空比D,來調(diào)節(jié)輸入/輸出關(guān)系,從而達(dá)到阻抗匹配的功能。
3基于模糊控制的MPPT實(shí)現(xiàn)
3.1模糊控制基本原理
模糊控制建立的基礎(chǔ)是模糊邏輯,它比傳統(tǒng)的邏輯系統(tǒng)更接近于人類的思維和語言表達(dá)方式。在一些復(fù)雜系統(tǒng),特別是系統(tǒng)存在定性的不精確和不確定信息的情況下,模糊控制的效果常優(yōu)于常規(guī)控制。模糊控制系統(tǒng)基本結(jié)構(gòu)如圖4所示。
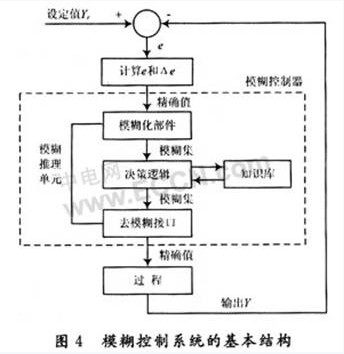
模糊控制系統(tǒng)一般按輸出誤差和誤差的變化對(duì)過程控制進(jìn)行控制,其首先將實(shí)際測(cè)量的精確量誤差e和誤差變化Δe經(jīng)過模糊處理而變換成模糊量,在采樣時(shí)刻k,定義誤差和誤差變化為:
式中:yr和yk分別表示設(shè)定值和k時(shí)刻的過程輸出;ek為k時(shí)刻的輸出誤差。用這些量來計(jì)算模糊控制規(guī)則,然后又變換成精確量對(duì)過程進(jìn)行控制。
3.2模糊控制器的設(shè)計(jì)
模糊邏輯控制器的設(shè)計(jì)主要包括以下幾項(xiàng)內(nèi)容:
(1)確定模糊控制器的輸入變量和輸出變量;
(2)歸納和總結(jié)模糊控制器的控制規(guī)則;
(3)確定模糊化和反模糊化的方法;
(4)選擇論域并確定有關(guān)參數(shù)。
模糊化的設(shè)計(jì),其解答往往不是惟一的,在很大程度上要運(yùn)用啟發(fā)式試探方法以求取得最佳的選擇。對(duì)于初始設(shè)計(jì)可先模擬,若控制性能達(dá)不到要求,則需要重新確定隸屬函數(shù),有時(shí)甚至要重新確定輸入/輸出量。
3.2.1輸入/輸出量模糊子集及論域
模糊系統(tǒng)的輸入輸出變量有輸入功率變化量E;輸入上次步長(zhǎng)量A(n-1);輸出步長(zhǎng)量A(n)。將語言變量E和A分別定義為8個(gè)和6個(gè)模糊子集,即:
E={NB,NM,NS,NO,PO,PS,PM,PB)
A={NB,NM,NS,PS,PM,PB}
式中:NB,NM,Ns,NO,PO,PS,PM,PB分別表示負(fù)大、負(fù)中、負(fù)零、正零、正小、正中、正大等模糊概念,并且它們的論域規(guī)定為14個(gè)和12個(gè)等級(jí),即:
E={-6,-5,-4,-3,-2,-1,-0,+0,+1,+2,+3,+4,+5,+6)
A={-6,-5,-4,-3,-2,-1,+1,+2,+3,+4,+5,+6}
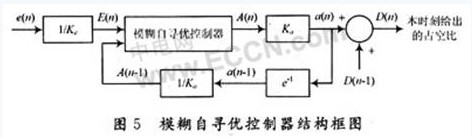
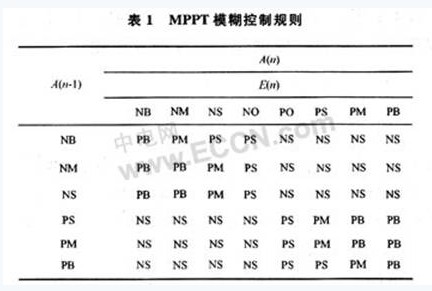
3.2.2 MPPT的模糊控制算法
圖5中e(n)表示第n時(shí)刻與第n-1時(shí)刻輸出功率之差的實(shí)際值;E(n)表示這個(gè)差值對(duì)應(yīng)于模糊集論域中的值;a(n)表示第n時(shí)刻步長(zhǎng)的實(shí)際值;A(n)表示這個(gè)步長(zhǎng)值對(duì)應(yīng)于模糊集論域中的值;Ke,Ka分別為量化因子。
通過對(duì)光伏電池輸出P與占空比D之間的特性曲線分析,并且考慮到外界環(huán)境因素對(duì)光伏電池輸出功率的影響,對(duì)實(shí)際仿真結(jié)果進(jìn)行調(diào)整得到的最終控制規(guī)則如表1所示。
4系統(tǒng)建模與仿真
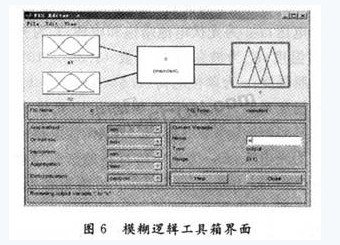
Matlab的模糊邏輯工具箱拓展了Matlab對(duì)模糊邏輯系統(tǒng)的設(shè)計(jì)能力,已經(jīng)成為運(yùn)用模糊手段解決工程問題的重要工具。在此結(jié)合Matlab7.1中的模糊邏輯工具箱進(jìn)行輔助設(shè)計(jì)。模糊邏輯工具箱在默認(rèn)狀態(tài)下給出了mamdani型控制器,選擇“交”方法為min;“并”方法為max;推理方法為min;聚類方法為max;解模糊方法為重心法。圖6為模糊邏輯工具箱界面。
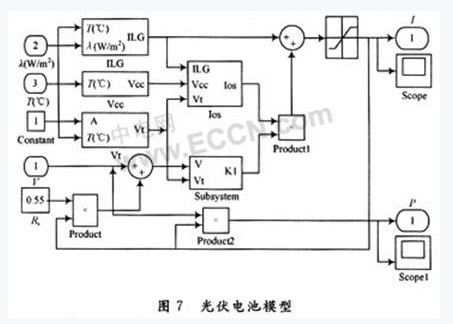
模糊控制器設(shè)計(jì)完畢后,利用Simulink搭建光伏電池模型,如圖7所示。
其次搭建MPPT模糊控制系統(tǒng)如圖8所示。
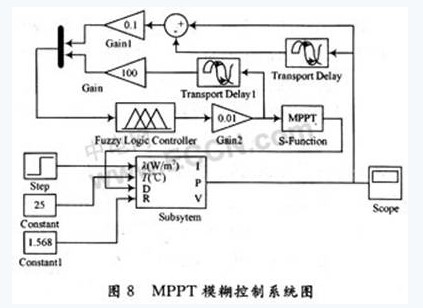
圖中,subsystem為光伏電池模型;S函數(shù)只實(shí)現(xiàn)D(n)=D(n-1)+a(n)的功能。其中,經(jīng)過反復(fù)試驗(yàn),量化因子Ka取0.01;Ke取10。模擬外界因素強(qiáng)度從600 W/m2突然增大到900 W/m2,表面溫度T=25℃,并設(shè)置仿真最大步長(zhǎng)時(shí)間為0.025 s,運(yùn)行時(shí)間為10 s。由此得到輸出功率波形如圖9所示。
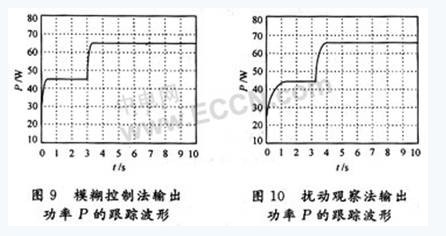
圖10為擾動(dòng)觀察法輸出功率的跟蹤波形。通過比較可以發(fā)現(xiàn),采用模糊邏輯控制跟蹤光伏電池最大功率點(diǎn),不僅跟蹤迅速,而且達(dá)到最大功率點(diǎn)后基本沒有波動(dòng),即具有良好的動(dòng)、穩(wěn)態(tài)性能。
5結(jié)語
在太陽能發(fā)電系統(tǒng)中進(jìn)行最大功率點(diǎn)跟蹤時(shí),根據(jù)跟蹤情況和電池表面溫度、日照強(qiáng)度等外界因素的變化,利用模糊控制來智能地調(diào)整步長(zhǎng)。
運(yùn)用Simulink建立模型并進(jìn)行仿真,其結(jié)果表明,將模糊控制運(yùn)用于最大功率跟蹤是可行的,并且表現(xiàn)出良好的控制性能。