
0 引言
在電機變頻調(diào)速系統(tǒng)中,廣泛應用到了PWM技術。PWM控制利用半導體開關器件的導通與關斷把整流后的直流電變成脈沖序列,通過控制脈沖寬度和脈沖列的周期以實現(xiàn)變壓、變頻控制,同時減少輸出電壓電流諧波。早期的SPWM控制主要著眼于使逆變器輸出電壓波形盡量接近于正弦波,希望輸出PWM電壓波形的基波成分盡量的大,諧波成分盡量的小,并沒有考慮到電動機本身旋轉(zhuǎn)磁場的影響。空間電壓矢量PWM技術是當前研究的熱點問題,它將逆變器和交流電機作為一個整體來考慮,其控制目標是使磁通軌跡近似為圓,也被稱為磁鏈跟蹤PWM控制。本文在分析空間電壓矢量PWM原理的基礎上,提出了一種基于16位PIC24FJ64GA單片機實現(xiàn)SVPWM控制的方法。
1 空間電壓矢量PWM控制原理
空間電壓矢量PWM控制是以三相對稱正弦波電壓供電狀態(tài)下交流電機的理想磁通圓為基準,利用逆變器各橋臂開關控制信號的不同組合,使逆變器的輸出工作電壓矢量作用形成的實際磁通運行軌跡逼近基準圓磁通運行軌跡。
定義基本定子電壓矢量為:
![]()
式中,ua、ub和uc分別為三相定子繞組相電壓。在變頻調(diào)速系統(tǒng)中,典型的三相電壓型逆變電路示意圖如圖1所示。Udc表示直流側(cè)電壓,電機定子側(cè)相電壓由三個功率器件SA、SB和SC的開關狀態(tài)決定,SA、SB和SC分別表示同一橋臂下兩個功率器件的開關狀態(tài)。若SA為1,表示上橋臂接通,下橋臂斷開,ua連接Udc;反之SA為0,表示下橋臂接通,上橋臂斷開,ua連接0。同理可得開關SA的狀態(tài)與ub的關系,開關SC的狀態(tài)與uc的關系。
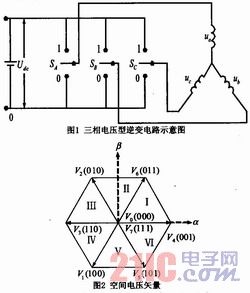
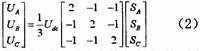
根據(jù)所得功率器件SA、SB和SC開關狀態(tài)的8種組合,可以構(gòu)成8種空間電壓矢量,如圖2所示。對外部負載而言,包括6個非零矢量V1(100)、V2(010)、V3(110)、V4(001)、V5(101)、V6(011),和2個零電壓矢量V0(000)、V7(111)的輸出電壓為零。六個非零電壓矢量在空間上相互間隔。
定子繞組Y型連接的電機三相輸入電壓為:
根據(jù)三相系統(tǒng)向兩相系統(tǒng)變換保持幅值不變的原則,三相電壓的合成空間矢量在α、β坐標系中可表示為:

式中,Uα、Uβ為空間電壓矢量在定子靜止αβ軸上的分量。
1.1 空間電壓矢量的合成
根據(jù)矢量合成的平行四邊形法則和PWM等效面積原理,利用上述8種矢量可以合成任意角度有限模長的輸出電壓矢量,其最大模長決定了輸出電壓的最大幅度,如圖3所示。

圖中θ為Uref與空間電壓矢量Uθ之間的夾角,Uref落在矢量Uα和Uβ之間,為兩者合成后的輸出電壓矢量,
![]()
式中,Ts為采樣周期,t1、t2分別為電壓矢量Uα,Uβ的作用時間。
根據(jù)三角正弦定理有:
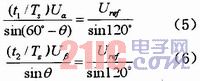
6種空間電壓矢量幅值相等,且等于2Udc/3,由式(5)和(6)可得:
![]()
在一個PWM周期Ts內(nèi)都改變相鄰基本矢量的作用時間,并保證所合成的電壓空間矢量的幅值都相等,因此當Ts取足夠小時,電壓矢量的軌跡是一個近似圓形的正多邊形。為了使每次的狀態(tài)轉(zhuǎn)換時,開關次數(shù)最少,需要在t0=Ts-t1-t2。為了使磁鏈的運動速度平滑,插入零矢量不是集中地插入,而是將零矢量平均分為幾份,多點地插入到磁鏈軌跡中去。
1.2 確定扇區(qū)
將圖2劃分為6個扇區(qū),扇區(qū)的編號在圖中標識,下面介紹一下確定扇區(qū)號的方法,令、 、分別為:
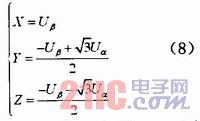
定義三個變量:m、n和p,如X>0,則m=1,否則m=0;y>0,則n=1,否則n=0:Z>0,則p=1,否則p=0。設扇區(qū)編號N=4p+2n+m,N與輸出電壓矢量所在的扇區(qū)對應關系如表1所示,
![]()
2 基于PIC單片機的SVPWM實現(xiàn)
空間電壓矢量PWM控制采用Microchip公司出品的PIC24FJ64GA芯片實現(xiàn),它是在現(xiàn)有的RISC單片機系列構(gòu)架的基礎上發(fā)展來的一種功能強大的架構(gòu)。通過向用戶提供更強的計算功能和更豐富的外設集,此架構(gòu)使用戶能夠升級他們的應用。與此同時,此架構(gòu)還被嚴格設計為與
現(xiàn)有的PIC MCU功能急和指令助記符盡可能一致,從而簡化了應用的升級工作。
PIC24FJ64GA004采用了改進的哈佛結(jié)構(gòu),具有獨立的程序和數(shù)據(jù)存儲空間以及獨立的程序和數(shù)據(jù)總線。架構(gòu)還允許在代碼執(zhí)行的過程中直接通過數(shù)據(jù)空間訪問程序空間。程序地址空間可存儲4M指令字。最高的運行速度可達到16MIPS,帶有4×PLL選項的8MHz內(nèi)部振蕩器和多個分頻選項,17位×17位單周期硬件乘法器,32位/16位工作寄存器,還具有優(yōu)化的C編譯器指令構(gòu)架,并且PIC24FJ64GA004還具有一系列能在工作時顯著降低功耗的功能,主要包括:動態(tài)時鐘切換,打盹模式操作,基于指令的節(jié)能模式。在模擬特性方面,它最多13通道的10位模DAC,用于電機轉(zhuǎn)速的反饋,電壓、電流等模擬信號的采用實現(xiàn)電機的各種控制,并且還具有故障保護時鐘監(jiān)視器操作功能,可以很好對電路進行保護。
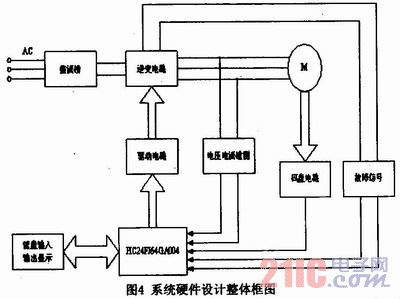
2.1 硬件電路框圖
PIC24FJ64GA具有5個帶編程預分頻器的16位定時器/計數(shù)器,5個16位輸入捕捉,5個16位比較/PWM輸出。在測速環(huán)節(jié)方面,本文采用光電碼盤測算方式,結(jié)合PIC24F單片機的定時器/計數(shù)器及相關接口,使用M/T法編程實現(xiàn)轉(zhuǎn)速的計算。歐姆龍公司生產(chǎn)的編碼器型號E6B2-CWZ6C,它由5~24V電源供電,有三路輸出,分別為A相、B相、Z相,其中A與B用于測速,它們的相位差為90°,每轉(zhuǎn)過一圈輸出1500個脈沖;而Z脈沖則是每轉(zhuǎn)過一圈輸出一個脈沖,用于系統(tǒng)定位。其中在電路設計中,逆變器的驅(qū)動,我們采用IR2130集成芯片,該芯片驅(qū)動的逆變器具有結(jié)構(gòu)簡單,工作穩(wěn)定,可靠地實現(xiàn)過流和短路保護等優(yōu)點,硬件結(jié)構(gòu)如圖4所示。
2.2 SVPWM算法軟件編程的實現(xiàn)
圖5初始化流程圖 圖6 SVPWM中斷子程序SVPWM算法可通過對PIC軟件的編程來實現(xiàn),程序編寫主要包括主程序和SVPWM中斷子程序。主程序主要完成對PIC24FJ64GA系統(tǒng)初始化,配置片上外圍資源等功能。中斷子程序主要完成輸出所需的PWM波形的功能。具體的流程圖如圖5和圖6所示。

3 結(jié)果分析
控制芯片采用16位單片機PIC24FJ64GA,在交流電機矢量控制系統(tǒng)中編寫空間電壓PWM算法下載到控制芯片中。仿真實驗電機參數(shù)為:額定功率為6kW,額定電壓為310V,極對數(shù)為2,轉(zhuǎn)動慣量為0.0085,額定轉(zhuǎn)速為3600r/min。仿真實驗輸出的相電流和線電壓波形如圖7和圖8所示。
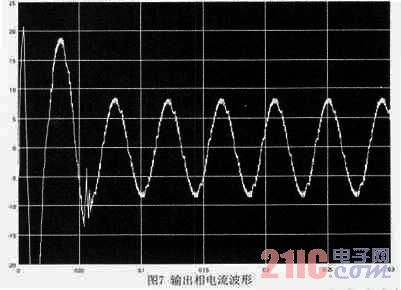
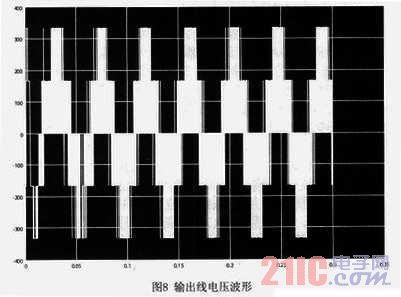
從圖中7和圖8可見,采用SVPWM算法,電流正弦度較好,定子輸出電壓電流諧波小,從而驗證了系統(tǒng)設計的有效件。
4 結(jié)論
空間電壓矢量PWM控制具有直流母線側(cè)電壓利用率高、開關器件損耗小、便于數(shù)字化實現(xiàn)等特點,已廣泛應用于交流電機變頻調(diào)速系統(tǒng)中。本文采用PIC單片機來實現(xiàn)SVPWM算法在交流電機變頻調(diào)速控制系統(tǒng)中的應用,具有成本低廉、電路設計簡單、電流諧波分量少等特點,在一些控制精度要求不高,如電爐爐溫調(diào)節(jié)、水位調(diào)節(jié)、風力調(diào)節(jié)等場合具有一定的應用空間。