
摘 要: 深海科學(xué)考察所用的調(diào)查設(shè)備其動力系統(tǒng)往往采用鋰電池供電加有刷直流電機的方式, 但鋰電池供電存在較多弊端, 且有刷直流電機機械換相部分容易因工作環(huán)境的惡劣出現(xiàn)故障, 針對這種情況設(shè)計了一種基于STM32F103微控制器的遠(yuǎn)程永磁同步電機控制系統(tǒng), 采用同軸電纜供電, 使系統(tǒng)的運行更加高效更加可靠, 有效延長了作業(yè)時間。
深海電機控制系統(tǒng)是深海科學(xué)考察、地質(zhì)勘探、生物資源采集、深海打撈等深海作業(yè)中的一項關(guān)鍵技術(shù), 使電機在深海的復(fù)雜環(huán)境中高效、可靠地運行具有重要的意義。目前, 在我國的深海科學(xué)考察中,通常采用有刷直流電機作為動力來源, 水下鋰電池為其供電。由于鋰電池價格昂貴且需要不時的對其進(jìn)行充電, 嚴(yán)重影響了有效作業(yè)時間, 所以, 采用水上供電即遠(yuǎn)程控制的方式有很大的實際意義。另一方面,有刷直流電機因長時間侵泡在高壓油中, 加上深海作業(yè)環(huán)境的惡劣, 電刷和換相器很容易損壞。而永磁同步電機利用電子換相代替了機械換相, 不但具有直流電機的調(diào)速性能, 而且體積小、效率高。永磁同步電機的轉(zhuǎn)子采用永磁體, 所以省去了勵磁電路, 因而具有更高的功率因素。近幾年由于新型稀土永磁材料的大量開發(fā)和利用, 使永磁同步電機的性能得到極大的提升, 而我國又擁有豐富的稀土資源, 相信永磁同步電機將會得到更廣泛的應(yīng)用。
1 系統(tǒng)控制原理
圖1是深海遠(yuǎn)程電機控制系統(tǒng)的組成框圖。能源與數(shù)據(jù)混合傳輸同軸電纜既給整個水下系統(tǒng)供電同時又提供了上位機和控制系統(tǒng)通信的線路, 供電電壓為1 kV。數(shù)據(jù)耦合通信模塊負(fù)責(zé)在同軸電纜上分離或疊加經(jīng)調(diào)制過的信號, 而DC /DC 電源負(fù)責(zé)把同軸纜上的1 kV 高壓降為電機的300 V工作電壓并產(chǎn)生供控制系統(tǒng)使用的15 V 電壓。STM32F103微控制器通過光耦隔離的RS232與數(shù)據(jù)耦合通信模塊進(jìn)行數(shù)據(jù)交換, 即接收指令或反饋電機工作狀態(tài)。由于電機運行時將產(chǎn)生很大的諧波, 干擾同軸電纜上的數(shù)據(jù)信號, 嚴(yán)重時將導(dǎo)致遠(yuǎn)程控制出錯而引起水下系統(tǒng)的誤操作, 所以要求設(shè)計的控制系統(tǒng)能很好的響應(yīng)上位機發(fā)出的控制指令。
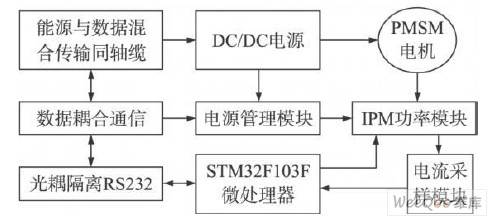
圖1 深海遠(yuǎn)程電機控制系統(tǒng)組成框圖
2 系統(tǒng)設(shè)計
2. 1 能源與數(shù)據(jù)混合傳輸同軸電纜
能源與數(shù)據(jù)混合傳輸同軸電纜是實現(xiàn)遠(yuǎn)程控制的關(guān)鍵部分, 電纜上的傳輸電壓波形如圖2 所示。
混合傳輸原理就是在發(fā)送端將直流電源和數(shù)據(jù)信號進(jìn)行疊加, 然后通過同軸電纜實現(xiàn)耦合后的傳輸, 在接收端再用濾波器將電源和數(shù)據(jù)分開, 這樣只用一根同軸電纜就實現(xiàn)了對控制系統(tǒng)的供電和控制。
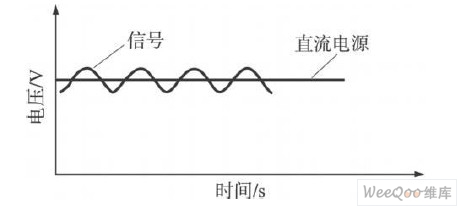
圖2 同軸電纜傳輸信號示意圖
2. 2 數(shù)據(jù)耦合通信模塊
數(shù)據(jù)耦合通信模塊主要由數(shù)據(jù)耦合器和調(diào)制解調(diào)電路兩部分構(gòu)成。調(diào)制解調(diào)電路對數(shù)據(jù)信號進(jìn)行調(diào)制和解調(diào)處理以實現(xiàn)信號的遠(yuǎn)距離傳輸。數(shù)據(jù)耦合器實質(zhì)上就是濾波器, 它是實現(xiàn)混合傳輸功能的主要部分, 其在整個系統(tǒng)中的作用如圖3 所示。
由于高壓功率電源和數(shù)據(jù)信號均要在此通過, 故要求濾波網(wǎng)絡(luò)耐高壓, 且傳輸功率信號損耗要小、效率高。該濾波網(wǎng)絡(luò)在同軸電纜的水上和水下兩端各有一組, 其結(jié)構(gòu)完全相同。
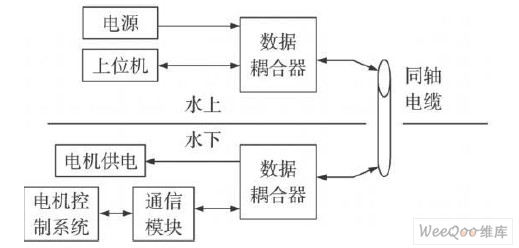
圖3 數(shù)據(jù)耦合器的作用
2. 3 PMSM 電機
PMSM 按永磁體在轉(zhuǎn)子上安裝的方式不同可分為面裝式、內(nèi)插式和內(nèi)埋式。由于永磁體的磁導(dǎo)率十分接近空氣, 面裝式的永磁體轉(zhuǎn)子交、直軸電感基本相等, 即L d = Lq, 屬于隱極式電機。由于其電感比較小, 故可快速獲得感應(yīng)電流, 且不會產(chǎn)生磁阻轉(zhuǎn)矩, 因此轉(zhuǎn)矩的線性比較好。本設(shè)計所用的電機即采用了此結(jié)構(gòu)。
PMSM的定子和普通電勵磁的三相同步電機的定子是相似的。如果永磁體產(chǎn)生的感應(yīng)電動勢(反電動勢)與勵磁線圈產(chǎn)生的感應(yīng)電動勢一樣, 也是正弦的, 那PMSM的數(shù)學(xué)模型與電勵磁同步電機基本相同。一臺兩極PMSM 的結(jié)構(gòu)如圖4所示。
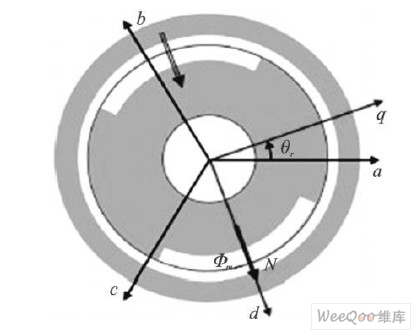
圖4 兩極PM SM 結(jié)構(gòu)圖
其中a、b、c軸方向分別為三相相繞組軸線的方向,在abc三軸坐標(biāo)系下PMSM的電壓方程和磁鏈方程分別為:
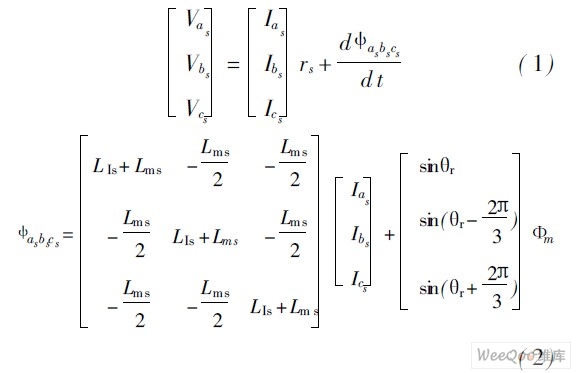
其中rs 是定子繞組的相電阻, Lms和L Is分別是定子繞組的勵磁電感和漏電感, r 是轉(zhuǎn)子電角度, Φm 是永磁體產(chǎn)生的磁鏈。由式( 2)可知, 三相定子的磁鏈?zhǔn)窍嗷ヱ詈系模?同時它們都是轉(zhuǎn)子位置的函數(shù), 這樣就給控制帶來了難度。
上世紀(jì)70年代西門子工程師F. B laschke首先提出了矢量控制理論來解決交流電機的轉(zhuǎn)矩控制問題,使交流電機特性得到極大的改善。矢量控制采用矢量變換方法, 通過把交流電機的磁通與轉(zhuǎn)矩控制解耦, 使交流電機的控制等效于直流電機。在圖2中,利用坐標(biāo)變換理論把三相靜止的abc 坐標(biāo)系變換成旋轉(zhuǎn)的dq坐標(biāo), 其中d 軸為永磁體轉(zhuǎn)子基波磁場的方向, 而q軸順著旋轉(zhuǎn)方向超前d 軸90 電角度。轉(zhuǎn)子參考坐標(biāo)的旋轉(zhuǎn)速度即為轉(zhuǎn)子速度。在dq 坐標(biāo)軸上的定子電壓方程和磁鏈方程簡化為:
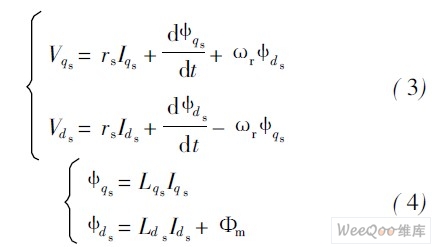
而面裝式PMSM 的電磁力矩可按下式計算, 其中P為電機的極對數(shù):

把式( 4)代入式( 5), 并且已知面裝式PMSM的Ld =Lq, 故最終可得電磁力矩表達(dá)式為:

從式( 6)可以看出控制定子的q 軸電流即可控制電機的電磁轉(zhuǎn)矩。
2. 4 IPM功率驅(qū)動和電流采樣模塊
本設(shè)計的功率部分采用了FAIRCH ILD 公司的FSBB20CH60 IPM模塊, 該功率智能模塊集成的MOS管最大工作電壓為600 V, 最大工作電流20 A, 具有很強的自我保護(hù)電路, 并帶有一路故障輸出。采用功率模塊不但減小了系統(tǒng)的體積, 而且比采用功率管加驅(qū)動芯片的方案具有更強的可靠性。FSBB20CH60的三相電壓輸出U、V、W 分別接PMSM 的ABC 相,Nu、Nv 和Nw 是三個半橋的下半橋輸出, 分別接電流采樣電阻, 阻值為15m#。現(xiàn)以U相為例說明電流的采樣方法。如圖5所示, Nu 和N 端分別接運放的正相端和反相端, 由于相電流可能流入繞組也可能流出繞組, 因此電壓信號是有正有負(fù), 而STM32F103 的ADC 輸入電壓范圍為0 V到3. 3 V, 故需要加偏置電壓VOFFSET。電流的計算方法如式( 7)所示。
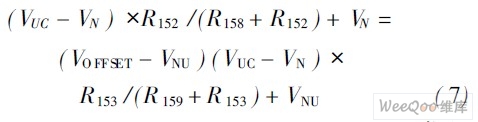
其中取R158 = R159 = 3. 9 kΩ, R 152 = R153 = 1 kΩ, 代入化簡可得式( 9), 再把式( 10)代入即可求得電流IU的值。
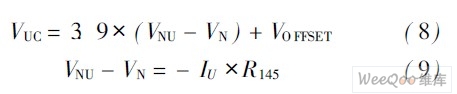

圖5 電流采樣原理圖
2. 5 光耦隔離RS232
為防止電機控制系統(tǒng)因高壓擊穿進(jìn)而損壞數(shù)據(jù)耦合通信模塊, 在STM32F103微控制器和數(shù)據(jù)耦合通信模塊之間采取了光耦隔離措施。光耦隔離RS232的原理圖如圖6所示。隔離芯片采用4N35,由于光耦器件的速度限制且所需傳送的數(shù)據(jù)量較小, 故RS232的通信速率設(shè)定為9600波特率。
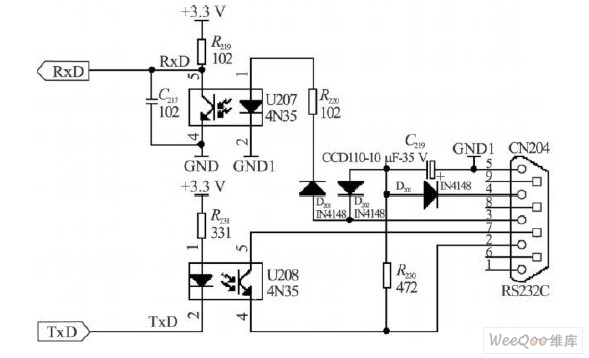
圖6 光耦隔離RS232
2. 6 STM32F103微控制器
ST公司的STM32F103控制器采用了ARM 公司最新的Cortex M3內(nèi)核, 哈佛結(jié)構(gòu)上實現(xiàn)1 25DM IPS /MH z, 3級流水線并帶分支指令預(yù)測, 采用Thumb 2指令集, 最高工作頻率可達(dá)72MH z。STM32F103片上集成了一個高級定時器TIM1, 能夠輸出六路互補帶死區(qū)的PWM波, 并且具有輸入打斷功能。當(dāng)功率器件上出現(xiàn)過流時使用打斷功能來關(guān)閉PWM 輸出, 保護(hù)功率器件。電機控制軟件流程圖如圖7所示。
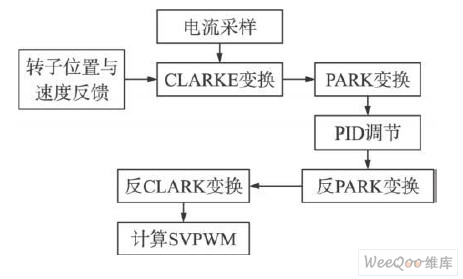
圖7 電機控制軟件流程圖
2. 7 DC /DC及電源管理模塊
DC /DC電源把同軸電纜上的1 kV 功率電壓降為電機的300 V 工作電壓并同時產(chǎn)生供FSBB20CH60功率模塊使用的15 V電壓, 該電壓為其集成MOS管的門極驅(qū)動電平。電源管理模塊則使用LM7805 和LM1117, 把15 V 電壓進(jìn)一步降低, 產(chǎn)生供STM32F103微控制器及控制系統(tǒng)中其它器件使用的3. 3 V 電壓。
3 系統(tǒng)測試
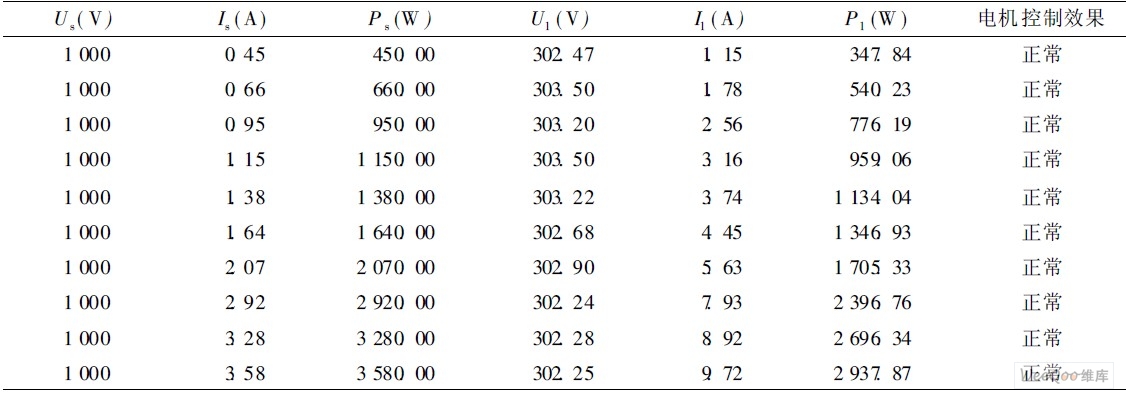
水上部分的電源采用高性能的穩(wěn)壓直流電源, 以減少紋波干擾, 輸出電壓為1 kV。電機負(fù)載逐漸加大, 實驗數(shù)據(jù)如表1所示。其中Us、Is 和P s 分別為穩(wěn)壓直流電源的輸出電壓、電流及功率, U1、I1 和P 1 分別是DC /DC 模塊的輸出電壓、電流及功率。實驗結(jié)果表明, 從空載到接近額定功率范圍內(nèi), STM32F103通過光耦隔離的RS232能夠正常的接收上位機發(fā)送的起停、加速減速指令, 電機運行良好, 可見電機運行時不影響同軸電纜上的正常通信, 符合設(shè)計要求。
表1 負(fù)載逐漸加大時的電機控制情況
4 結(jié)束語
本文使用意法半導(dǎo)體公司的最新ARM Cortex-M3 微控制器STM32F103 控制PMSM 電機,STM32F103具有高速雙AD、高級定時器等電機控制所必須的電路, 且具有較高的工作頻率。同時利用數(shù)據(jù)與能源混合傳輸技術(shù), 實現(xiàn)了既對深海動力設(shè)備供電又能進(jìn)行遠(yuǎn)程控制, 克服了使用鋰電池供電的諸多弊病。
這種設(shè)備已經(jīng)成功的應(yīng)用在了我國科學(xué)考察船“大洋一號”上, 實踐證明, 比傳統(tǒng)的方法更具靈活高效, 大大增加了科考作業(yè)時間, 減少了設(shè)備維護(hù)次數(shù), 具有很好的應(yīng)用前景。